Das könnte Ihnen auch gefallen
- Metode FOBSDokument20 SeitenMetode FOBSSucipto Hadi SaputroNoch keine Bewertungen
- Scheduling of Shipyard Block Assembly Process Using Constraint Satisfaction ProblemDokument33 SeitenScheduling of Shipyard Block Assembly Process Using Constraint Satisfaction ProblemMarius ChiroscaNoch keine Bewertungen
- Scantling Is A Measurement of Prescribed Size, Dimensions, or Cross Sectional Areas. ForDokument1 SeiteScantling Is A Measurement of Prescribed Size, Dimensions, or Cross Sectional Areas. Foralp_alpNoch keine Bewertungen
- Analisa Pengaruh Bulbous Bow Terhadap Tahanan Kapal Dan Konsumsi Bahan Bakar Pada Kapal Perintis 2000 GTDokument4 SeitenAnalisa Pengaruh Bulbous Bow Terhadap Tahanan Kapal Dan Konsumsi Bahan Bakar Pada Kapal Perintis 2000 GTUntuk KegiatanNoch keine Bewertungen
- Ship Production and Management AbhinavDokument7 SeitenShip Production and Management AbhinavASPIN RAJNoch keine Bewertungen
- Shell Structure: 5.1 Thickness of Shell PlatesDokument8 SeitenShell Structure: 5.1 Thickness of Shell PlatesJuan SilvaNoch keine Bewertungen
- Design Engineering MastsDokument27 SeitenDesign Engineering Maststkbernardi6410Noch keine Bewertungen
- Built-In Buoyancy Computation - Worked Example - Revision 1.3Dokument19 SeitenBuilt-In Buoyancy Computation - Worked Example - Revision 1.3Ikhwan ShafiqNoch keine Bewertungen
- Hoyle J W.Bulbous Bow Design M.1986.TRANS PDFDokument26 SeitenHoyle J W.Bulbous Bow Design M.1986.TRANS PDFThanos Niotis100% (1)
- Design ReportDokument46 SeitenDesign Reportfaizankhan23Noch keine Bewertungen
- Block Erection Sequencing in Shipbuilding With General Lifting and Joining TimesDokument8 SeitenBlock Erection Sequencing in Shipbuilding With General Lifting and Joining TimesJoão Mendonça SantosNoch keine Bewertungen
- Slides 01Dokument240 SeitenSlides 01beepee14Noch keine Bewertungen
- Casing DesignDokument5 SeitenCasing Designmustafasavci900Noch keine Bewertungen
- Pier Design Example - US Units - Design Step 8Dokument50 SeitenPier Design Example - US Units - Design Step 8amitdas19830131Noch keine Bewertungen
- Structural Analysis On The Block Lifting in Shipbuilding Construction ProcessDokument6 SeitenStructural Analysis On The Block Lifting in Shipbuilding Construction ProcessGogyNoch keine Bewertungen
- Application of Air-Deck Technique in Surface BlastingDokument7 SeitenApplication of Air-Deck Technique in Surface Blastingpartha das sharma83% (6)
- Chapter 3 Ni VDokument11 SeitenChapter 3 Ni VAjjeyyyNoch keine Bewertungen
- Understanding Operating Systems 8th Edition Mchoes Solutions ManualDokument20 SeitenUnderstanding Operating Systems 8th Edition Mchoes Solutions ManualSarahWilliamsbtsk92% (13)
- Analisa Kekuatan Konstruksi Bracket Towing Hook Pada Tb. Bontang Dengan Metode Elemen Hingga Dan Rules BkiDokument5 SeitenAnalisa Kekuatan Konstruksi Bracket Towing Hook Pada Tb. Bontang Dengan Metode Elemen Hingga Dan Rules BkiReza RFNoch keine Bewertungen
- Design Example PierDokument53 SeitenDesign Example PierKasun Shidesh100% (11)
- FSI Analysis and Fatigue Analysis of BOP Gantry CraneDokument6 SeitenFSI Analysis and Fatigue Analysis of BOP Gantry CranePetros IosifidisNoch keine Bewertungen
- Q2 - 2005 (Office Building) SolutionDokument19 SeitenQ2 - 2005 (Office Building) SolutionAhmad Al-RifaiNoch keine Bewertungen
- 8514-927002, Historical Summary ReportDokument195 Seiten8514-927002, Historical Summary ReportrenatobellarosaNoch keine Bewertungen
- General Arrangement DockingPlanDokument3 SeitenGeneral Arrangement DockingPlaniris2326Noch keine Bewertungen
- Module 3 - Prospecting and ExplorationDokument17 SeitenModule 3 - Prospecting and ExplorationSkeptical DoolaNoch keine Bewertungen
- Transverse StrengthDokument2 SeitenTransverse Strengthphilipgeorge1993Noch keine Bewertungen
- Aircraft Structural DesignDokument30 SeitenAircraft Structural Designarun_justin_1Noch keine Bewertungen
- Abutment and Wingwall Design Example - US Units - Design Step 7Dokument96 SeitenAbutment and Wingwall Design Example - US Units - Design Step 7rajsedasari100% (1)
- Chapter 3Dokument14 SeitenChapter 3Stephen SogahNoch keine Bewertungen
- The Structural Behaviour of Castellated BeamsDokument152 SeitenThe Structural Behaviour of Castellated BeamsAdnan NajemNoch keine Bewertungen
- بيريمافيرا 6Dokument119 Seitenبيريمافيرا 6AhmedNoch keine Bewertungen
- Integrated Building Design: 7 JUNE, 2014Dokument19 SeitenIntegrated Building Design: 7 JUNE, 2014saima-16Noch keine Bewertungen
- HMK 4 ARCDokument3 SeitenHMK 4 ARCskeletorfearsmeNoch keine Bewertungen
- Grillage Method Applied to the Planning of Ship Docking 150-157 - JAROE - 2016-017 - JangHyunLee - - 최종Dokument8 SeitenGrillage Method Applied to the Planning of Ship Docking 150-157 - JAROE - 2016-017 - JangHyunLee - - 최종tyuNoch keine Bewertungen
- An Algorithm For Generating The Hull Structural AnDokument11 SeitenAn Algorithm For Generating The Hull Structural AnMaximNoch keine Bewertungen
- Appendix-WEEK 1-2Dokument27 SeitenAppendix-WEEK 1-2CHRISTIAN BRIX GASPARNoch keine Bewertungen
- 3.3-Design of Shallow FoundationDokument32 Seiten3.3-Design of Shallow FoundationSamson YonasNoch keine Bewertungen
- Wing WallDokument135 SeitenWing WallPanca AtmajatamaNoch keine Bewertungen
- ENSC2001 Final ReportDokument16 SeitenENSC2001 Final Reportimaginazn100% (5)
- Building Structure Project 1: Fettuccine Truss BridgeDokument41 SeitenBuilding Structure Project 1: Fettuccine Truss BridgeWeiYingSabrinaNoch keine Bewertungen
- Brendan Duffy Senior Design Report 2b1wvxzDokument12 SeitenBrendan Duffy Senior Design Report 2b1wvxzmuhammet mutluNoch keine Bewertungen
- Pier Design Example - US Units - Design Step 8Dokument45 SeitenPier Design Example - US Units - Design Step 800152100% (1)
- Design and Reanalysis of Pile Cap With Five Piles Under Eccentricity PDFDokument7 SeitenDesign and Reanalysis of Pile Cap With Five Piles Under Eccentricity PDFNfs TarTonNoch keine Bewertungen
- A.W.Skempton - (1951) - The Bearing Capacity of ClaysDokument13 SeitenA.W.Skempton - (1951) - The Bearing Capacity of ClaysAnonymous PibYPgh100% (3)
- Load Calculation Met Arm - 2 - EscalatorDokument3 SeitenLoad Calculation Met Arm - 2 - Escalatorvrajan1988Noch keine Bewertungen
- Airplane HoneycombDokument11 SeitenAirplane Honeycombsuryo_atmojoNoch keine Bewertungen
- The Function and Mechanism of Conveyor Pulley DrumsDokument15 SeitenThe Function and Mechanism of Conveyor Pulley DrumsKroya HunNoch keine Bewertungen
- Mod 2Dokument7 SeitenMod 2DARYL ANN GABOTNoch keine Bewertungen
- Advanced Opensees Algorithms, Volume 1: Probability Analysis Of High Pier Cable-Stayed Bridge Under Multiple-Support Excitations, And LiquefactionVon EverandAdvanced Opensees Algorithms, Volume 1: Probability Analysis Of High Pier Cable-Stayed Bridge Under Multiple-Support Excitations, And LiquefactionNoch keine Bewertungen
- A Practical Course in Wooden Boat and Ship BuildingVon EverandA Practical Course in Wooden Boat and Ship BuildingBewertung: 4 von 5 Sternen4/5 (1)
- Reservoir Engineering in Modern Oilfields: Vertical, Deviated, Horizontal and Multilateral Well SystemsVon EverandReservoir Engineering in Modern Oilfields: Vertical, Deviated, Horizontal and Multilateral Well SystemsNoch keine Bewertungen
- Steel Structures Design Based on Eurocode 3Von EverandSteel Structures Design Based on Eurocode 3Bewertung: 3 von 5 Sternen3/5 (1)
- Pocket Guide to Flanges, Fittings, and Piping DataVon EverandPocket Guide to Flanges, Fittings, and Piping DataBewertung: 3.5 von 5 Sternen3.5/5 (22)
- How to Build a Children's Swing, Slide, Roundabout and Toboggan for the Garden - An Illustrated GuideVon EverandHow to Build a Children's Swing, Slide, Roundabout and Toboggan for the Garden - An Illustrated GuideNoch keine Bewertungen
- Reinforced Concrete Grade Beams, Piles & Caissons: A Practical Guide for Hillside ConstructionVon EverandReinforced Concrete Grade Beams, Piles & Caissons: A Practical Guide for Hillside ConstructionNoch keine Bewertungen
- Owner's Management of Ship Construction ContractsDokument21 SeitenOwner's Management of Ship Construction ContractsgopalptkssNoch keine Bewertungen
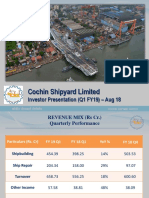
- CSL Investor Presentation Aug 18Dokument21 SeitenCSL Investor Presentation Aug 18gopalptkssNoch keine Bewertungen
- An Analysis of Indian Shipbuilding and Repair Industry PDFDokument9 SeitenAn Analysis of Indian Shipbuilding and Repair Industry PDFgopalptkssNoch keine Bewertungen
- Shipyard Management of The Customer Nad ManagementDokument4 SeitenShipyard Management of The Customer Nad ManagementgopalptkssNoch keine Bewertungen
- MIT Shipbuilding Cost EstimationDokument82 SeitenMIT Shipbuilding Cost Estimationgopalptkss100% (1)
- Why Nations Fail - SummaryDokument3 SeitenWhy Nations Fail - SummarysaraNoch keine Bewertungen
- HP MSM775 ZL Controller Installation GuideDokument21 SeitenHP MSM775 ZL Controller Installation GuidezarandijaNoch keine Bewertungen
- Harper 2001Dokument6 SeitenHarper 2001Elena GologanNoch keine Bewertungen
- Adobe Scan Sep 06, 2023Dokument1 SeiteAdobe Scan Sep 06, 2023ANkit Singh MaanNoch keine Bewertungen
- Channels of CommunicationDokument3 SeitenChannels of CommunicationIrin ChhinchaniNoch keine Bewertungen
- Narrative of John 4:7-30 (MSG) : "Would You Give Me A Drink of Water?"Dokument1 SeiteNarrative of John 4:7-30 (MSG) : "Would You Give Me A Drink of Water?"AdrianNoch keine Bewertungen
- God Whose Will Is Health and Wholeness HymnDokument1 SeiteGod Whose Will Is Health and Wholeness HymnJonathanNoch keine Bewertungen
- Pencak Silat New Rules 2020 - Slides Presentation (International) - As of 22 Aug 2020 - 1000hrs (1) (201-400)Dokument200 SeitenPencak Silat New Rules 2020 - Slides Presentation (International) - As of 22 Aug 2020 - 1000hrs (1) (201-400)Yasin ilmansyah hakimNoch keine Bewertungen
- For Printing Week 5 PerdevDokument8 SeitenFor Printing Week 5 PerdevmariNoch keine Bewertungen
- Neolms Week 1-2,2Dokument21 SeitenNeolms Week 1-2,2Kimberly Quin CanasNoch keine Bewertungen
- Value Chain AnalaysisDokument100 SeitenValue Chain AnalaysisDaguale Melaku AyeleNoch keine Bewertungen
- Especificação - PneusDokument10 SeitenEspecificação - Pneusmarcos eduNoch keine Bewertungen
- Things in The Classroom WorksheetDokument2 SeitenThings in The Classroom WorksheetElizabeth AstaizaNoch keine Bewertungen
- Bike Chasis DesignDokument7 SeitenBike Chasis Designparth sarthyNoch keine Bewertungen
- Harlem Renaissance LiteratureDokument2 SeitenHarlem Renaissance LiteratureSylvia Danis100% (1)
- Ancient Egyptian TimelineDokument5 SeitenAncient Egyptian TimelineMariz Miho100% (2)
- Assignment of Public Speaking Section A2Dokument2 SeitenAssignment of Public Speaking Section A2Hamza KhalidNoch keine Bewertungen
- Agrarian ReformDokument40 SeitenAgrarian ReformYannel Villaber100% (2)
- 2nd Quarter Exam All Source g12Dokument314 Seiten2nd Quarter Exam All Source g12Bobo Ka100% (1)
- CA39BDokument2 SeitenCA39BWaheed Uddin Mohammed100% (2)
- 6977 - Read and Answer The WorksheetDokument1 Seite6977 - Read and Answer The Worksheetmohamad aliNoch keine Bewertungen
- Fireware EssentialsDokument499 SeitenFireware EssentialsEmmanuel RodríguezNoch keine Bewertungen
- Cui Et Al. 2017Dokument10 SeitenCui Et Al. 2017Manaswini VadlamaniNoch keine Bewertungen
- Bimetallic ZN and HF On Silica Catalysts For The Conversion of Ethanol To 1,3-ButadieneDokument10 SeitenBimetallic ZN and HF On Silica Catalysts For The Conversion of Ethanol To 1,3-ButadieneTalitha AdhyaksantiNoch keine Bewertungen
- Earnings Statement: Hilton Management Lane TN 38117 Lane TN 38117 LLC 755 Crossover MemphisDokument2 SeitenEarnings Statement: Hilton Management Lane TN 38117 Lane TN 38117 LLC 755 Crossover MemphisSelina González HerreraNoch keine Bewertungen
- Types of Vegetation in Western EuropeDokument12 SeitenTypes of Vegetation in Western EuropeChemutai EzekielNoch keine Bewertungen
- Corelation & Multiple Regression AnalysisDokument28 SeitenCorelation & Multiple Regression AnalysisSaad Bin Tariq100% (1)
- ZultaniteDokument4 SeitenZultaniteAcharya BalwantNoch keine Bewertungen
- James Ellroy PerfidiaDokument4 SeitenJames Ellroy PerfidiaMichelly Cristina SilvaNoch keine Bewertungen