Das könnte Ihnen auch gefallen
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- 2016 IEEE Sensors - 1 May Adaptive VLC ReceiversDokument9 Seiten2016 IEEE Sensors - 1 May Adaptive VLC ReceiversPopescu VasileNoch keine Bewertungen
- Laborator 2 3bMCsimDokument102 SeitenLaborator 2 3bMCsimPopescu VasileNoch keine Bewertungen
- Laborator 2 2 2bDokument96 SeitenLaborator 2 2 2bPopescu VasileNoch keine Bewertungen
- Inchidere Octavia 1 1997Dokument5 SeitenInchidere Octavia 1 1997Popescu VasileNoch keine Bewertungen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (894)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Acknowledgment: George & Also To Our Group Guide Asst. Prof. Simy M Baby, For Their Valuable Guidance and HelpDokument50 SeitenAcknowledgment: George & Also To Our Group Guide Asst. Prof. Simy M Baby, For Their Valuable Guidance and HelpKhurram ShahzadNoch keine Bewertungen
- Exercise No. 7: AIM: To Prepare STATE CHART DIAGRAM For Weather Forecasting System. Requirements: Hardware InterfacesDokument4 SeitenExercise No. 7: AIM: To Prepare STATE CHART DIAGRAM For Weather Forecasting System. Requirements: Hardware InterfacesPriyanshu SinghalNoch keine Bewertungen
- SINGGAR MULIA ENGINEERING HORIZONTAL 2-PHASE SEPARATORDokument3 SeitenSINGGAR MULIA ENGINEERING HORIZONTAL 2-PHASE SEPARATORElias EliasNoch keine Bewertungen
- Lesson 3 - Materials That Undergo DecayDokument14 SeitenLesson 3 - Materials That Undergo DecayFUMIKO SOPHIA67% (6)
- ДСТУ EN ISO 2400-2016 - Калибровочный блок V1Dokument11 SeitenДСТУ EN ISO 2400-2016 - Калибровочный блок V1Игорь ВадешкинNoch keine Bewertungen
- Afar Partnerships Ms. Ellery D. de Leon: True or FalseDokument6 SeitenAfar Partnerships Ms. Ellery D. de Leon: True or FalsePat DrezaNoch keine Bewertungen
- Harry Styles: The Rise of a Pop StarDokument9 SeitenHarry Styles: The Rise of a Pop StarBilqis LaudyaNoch keine Bewertungen
- City Gas Distribution ReportDokument22 SeitenCity Gas Distribution Reportdimple1101100% (9)
- The Punjab Commission On The Status of Women Act 2014 PDFDokument7 SeitenThe Punjab Commission On The Status of Women Act 2014 PDFPhdf MultanNoch keine Bewertungen
- Tambunting Pawnshop Vs CIR Re VATDokument7 SeitenTambunting Pawnshop Vs CIR Re VATMark Lester Lee AureNoch keine Bewertungen
- (EMERSON) Loop CheckingDokument29 Seiten(EMERSON) Loop CheckingDavid Chagas80% (5)
- (Lesson 10-1) - Quality Assurance, Hemocytometry, Thoma PipetsDokument22 Seiten(Lesson 10-1) - Quality Assurance, Hemocytometry, Thoma PipetselleNoch keine Bewertungen
- HandoverDokument2 SeitenHandoverKumaresh Shanmuga Sundaram100% (1)
- nrcs143 009445Dokument4 Seitennrcs143 009445mdsaleemullaNoch keine Bewertungen
- Dewatering Construction Sites Below Water TableDokument6 SeitenDewatering Construction Sites Below Water TableSOMSUBHRA SINGHANoch keine Bewertungen
- Shri Siddheshwar Co-Operative BankDokument11 SeitenShri Siddheshwar Co-Operative BankPrabhu Mandewali50% (2)
- Exercise Manual For Course 973: Programming C# Extended Features: Hands-OnDokument122 SeitenExercise Manual For Course 973: Programming C# Extended Features: Hands-OnAdrian GorganNoch keine Bewertungen
- Industry Life Cycle-Plant Based CaseDokument3 SeitenIndustry Life Cycle-Plant Based CaseRachelle BrownNoch keine Bewertungen
- JIS K 6250: Rubber - General Procedures For Preparing and Conditioning Test Pieces For Physical Test MethodsDokument43 SeitenJIS K 6250: Rubber - General Procedures For Preparing and Conditioning Test Pieces For Physical Test Methodsbignose93gmail.com0% (1)
- Evan Gray ResumeDokument2 SeitenEvan Gray Resumeapi-298878624Noch keine Bewertungen
- Siyaram S AR 18-19 With Notice CompressedDokument128 SeitenSiyaram S AR 18-19 With Notice Compressedkhushboo rajputNoch keine Bewertungen
- 3000W InverterDokument2 Seiten3000W InverterSeda Armand AllaNoch keine Bewertungen
- Diagram of Thermal RunawayDokument9 SeitenDiagram of Thermal RunawayVeera ManiNoch keine Bewertungen
- Literature Review 5Dokument4 SeitenLiterature Review 5api-463653994Noch keine Bewertungen
- Ultrasonic Examination of Heavy Steel Forgings: Standard Practice ForDokument7 SeitenUltrasonic Examination of Heavy Steel Forgings: Standard Practice ForbatataNoch keine Bewertungen
- Camera MatchingDokument10 SeitenCamera MatchingcleristonmarquesNoch keine Bewertungen
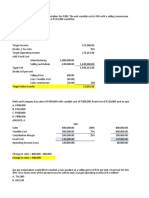
- CVP Solution (Quiz)Dokument9 SeitenCVP Solution (Quiz)Angela Miles DizonNoch keine Bewertungen
- ViscosimetroDokument7 SeitenViscosimetroAndres FernándezNoch keine Bewertungen
- Macdonald v. National City Bank of New YorkDokument6 SeitenMacdonald v. National City Bank of New YorkSecret SecretNoch keine Bewertungen
- Presentation Pineda Research CenterDokument11 SeitenPresentation Pineda Research CenterPinedaMongeNoch keine Bewertungen