Das könnte Ihnen auch gefallen
- Rokkon R - FSDokument4 SeitenRokkon R - FSAlagu RamNoch keine Bewertungen
- Chapter03rqd RSR RMR Q ReinforcementDokument12 SeitenChapter03rqd RSR RMR Q ReinforcementAlagu RamNoch keine Bewertungen
- MiMining Eng Handbook 2009 Flotation FundamentalsDokument14 SeitenMiMining Eng Handbook 2009 Flotation FundamentalsAlagu RamNoch keine Bewertungen
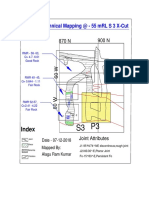
- Index: Geotechnical Mapping at - 55 MRL S 3 X-CutDokument2 SeitenIndex: Geotechnical Mapping at - 55 MRL S 3 X-CutAlagu RamNoch keine Bewertungen
- MiMining Eng Handbook 2009 Flotation Fundamentals PDFDokument30 SeitenMiMining Eng Handbook 2009 Flotation Fundamentals PDFAlagu RamNoch keine Bewertungen
- Blasting in Mines - 316Dokument11 SeitenBlasting in Mines - 316Alagu RamNoch keine Bewertungen
- Loads On Barricades in Hydraulically Backfilled Underground Mine StopesDokument12 SeitenLoads On Barricades in Hydraulically Backfilled Underground Mine StopesAlagu RamNoch keine Bewertungen
- 3770a Mot Tri enDokument56 Seiten3770a Mot Tri enAlagu RamNoch keine Bewertungen
- 01 SainsburyDokument16 Seiten01 SainsburyAlagu RamNoch keine Bewertungen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- QuoteDokument3 SeitenQuotemjnasar khan jamalNoch keine Bewertungen
- L3 - Hardening Soil Models in PlaxisDokument33 SeitenL3 - Hardening Soil Models in PlaxisOng Tai BoonNoch keine Bewertungen
- BSA D14 175 Bantam Supreme Sports Bushman Maintenance Instruction Manual PDFDokument37 SeitenBSA D14 175 Bantam Supreme Sports Bushman Maintenance Instruction Manual PDFjvdkjdlkkNoch keine Bewertungen
- Data Sheet For Toys TestDokument2 SeitenData Sheet For Toys TestAnonymous TYGiADNoch keine Bewertungen
- A Review On Water ElectrolysisDokument18 SeitenA Review On Water ElectrolysisSilvester KolicNoch keine Bewertungen
- ProeDokument160 SeitenProejohn100% (1)
- Benq mp510 Level1Dokument212 SeitenBenq mp510 Level1Juan Duarte Lopez100% (1)
- B0210D PDFDokument9 SeitenB0210D PDFAldo TonatoNoch keine Bewertungen
- Friction Loss Calculations of Irrigation Design A Foot Ball CourtDokument13 SeitenFriction Loss Calculations of Irrigation Design A Foot Ball Courtmathewmanjooran100% (2)
- 3 Carpentry Technology 1Dokument7 Seiten3 Carpentry Technology 1Czar InaNoch keine Bewertungen
- SLAManualDokument187 SeitenSLAManualfarhadhassan100% (1)
- b-737 - Rev 59 PDFDokument402 Seitenb-737 - Rev 59 PDFCatevario NegroNoch keine Bewertungen
- Sqldatagrid Symbol User'S Guide: ArchestraDokument36 SeitenSqldatagrid Symbol User'S Guide: ArchestraAde SuryaNoch keine Bewertungen
- Earthquake in TaguigDokument4 SeitenEarthquake in TaguigDianca Zyra Rodil-CabanelaNoch keine Bewertungen
- Tutorial Sheet 7Dokument2 SeitenTutorial Sheet 7Muhammad NidzwanNoch keine Bewertungen
- C# Jumpstart Module 1 IntroDokument31 SeitenC# Jumpstart Module 1 IntroAnjana JayasekaraNoch keine Bewertungen
- Modeling and Control of Side Face Beam Cracking - FroschDokument10 SeitenModeling and Control of Side Face Beam Cracking - FroschphamminhquangNoch keine Bewertungen
- Deckwatchkeeping 1 - Collision RegulationDokument13 SeitenDeckwatchkeeping 1 - Collision RegulationLalyn Navora BalansagNoch keine Bewertungen
- lfb10 Call PointDokument1 Seitelfb10 Call PointOmar AhmedNoch keine Bewertungen
- Changed Chart(s) Since Disc 16-2012 ADD Added Chart, REV Revised Chart, DEL Deleted Chart. ACT Procedure Ident Index Rev Date Eff DateDokument98 SeitenChanged Chart(s) Since Disc 16-2012 ADD Added Chart, REV Revised Chart, DEL Deleted Chart. ACT Procedure Ident Index Rev Date Eff DateFercho Anaya MNoch keine Bewertungen
- Column ChromatographyDokument9 SeitenColumn ChromatographyMd Shahjalal Sagor67% (3)
- System Theory - Model ExamDokument2 SeitenSystem Theory - Model ExamrajapandiyaNoch keine Bewertungen
- Fourier Series - MATLAB & Simulink PDFDokument7 SeitenFourier Series - MATLAB & Simulink PDFWanderson Antonio Sousa SilvaNoch keine Bewertungen
- Fizik F4 P2 (2016)Dokument19 SeitenFizik F4 P2 (2016)AHMAD FAISALNoch keine Bewertungen
- bt2505b Bluetooth PhilipsDokument2 Seitenbt2505b Bluetooth Philipsgursharan singh GSGNoch keine Bewertungen
- Pompa WarmanDokument2 SeitenPompa WarmanRahmad Saleh SiregarNoch keine Bewertungen
- Work at Height Questions For Height PassDokument3 SeitenWork at Height Questions For Height PassPravash Mohanty100% (1)
- DTCNDokument232 SeitenDTCNCMM INFRAPROJECTS LTDNoch keine Bewertungen
- Feild Inspection of Shell and Tube Heat ExchangersDokument4 SeitenFeild Inspection of Shell and Tube Heat ExchangersMatthew BennettNoch keine Bewertungen
- Study of LZ77 and LZ78 Data CompressionDokument5 SeitenStudy of LZ77 and LZ78 Data CompressionYa SaNoch keine Bewertungen