Das könnte Ihnen auch gefallen
- Shock Absorber DynamometerDokument19 SeitenShock Absorber DynamometerUmanath R Poojary100% (1)
- Arduino Applied: Comprehensive Projects for Everyday ElectronicsVon EverandArduino Applied: Comprehensive Projects for Everyday ElectronicsNoch keine Bewertungen
- ILO - Working Conditions of Contract Workers in The Oil and Gas IndustriesDokument106 SeitenILO - Working Conditions of Contract Workers in The Oil and Gas IndustriesLuís Augusto Lopes100% (1)
- Udhe 2.standardsDokument1 SeiteUdhe 2.standardsom dhamnikarNoch keine Bewertungen
- Morphological Fire Fighting DroneDokument10 SeitenMorphological Fire Fighting DroneInternational Journal of Innovative Science and Research TechnologyNoch keine Bewertungen
- Autonomous Fire Fighting RobotDokument6 SeitenAutonomous Fire Fighting RobotRulemaker Studios OfficialNoch keine Bewertungen
- Monitoring and Controlling of Fire Fighthing Robot Using IOTDokument6 SeitenMonitoring and Controlling of Fire Fighthing Robot Using IOT21146387Noch keine Bewertungen
- IOT Based Fire Fighting Robot: Megha Kanwar, Agilandeeswari LDokument6 SeitenIOT Based Fire Fighting Robot: Megha Kanwar, Agilandeeswari Lpooja madhurkarNoch keine Bewertungen
- Fire-Fighting Robot: Jayanth Suresh M.S Electrical Engineering Rochester Institute of Technology New York, USDokument4 SeitenFire-Fighting Robot: Jayanth Suresh M.S Electrical Engineering Rochester Institute of Technology New York, USpooja madhurkarNoch keine Bewertungen
- Fire Extinguishing RobotDokument4 SeitenFire Extinguishing RobotShree Krishna TaraiNoch keine Bewertungen
- Mr. FFRRDokument24 SeitenMr. FFRRSyed MohiuddinNoch keine Bewertungen
- FFR TdayDokument31 SeitenFFR TdaySyed MohiuddinNoch keine Bewertungen
- Fin Irjmets1684126285Dokument10 SeitenFin Irjmets1684126285arafarhossain45Noch keine Bewertungen
- IJCRT1892114Dokument4 SeitenIJCRT1892114rassNoch keine Bewertungen
- Towards Reducing The Damage of Fire Through Firefighting Autonomous RobotDokument6 SeitenTowards Reducing The Damage of Fire Through Firefighting Autonomous RobotANNooonynmousNoch keine Bewertungen
- Multiple Sensors Based Fire Extinguisher Robot Bas PDFDokument7 SeitenMultiple Sensors Based Fire Extinguisher Robot Bas PDFKeerthi SanaNoch keine Bewertungen
- Design and Analysis The Fire Fighting RobotDokument6 SeitenDesign and Analysis The Fire Fighting RobotGopi ChandNoch keine Bewertungen
- Autonomous Fire Detecting and Extinguishing Robot: Abstract - This Paper Examines and Leverages The Potential ofDokument3 SeitenAutonomous Fire Detecting and Extinguishing Robot: Abstract - This Paper Examines and Leverages The Potential ofCESAR LUIGGI ZAMORA OBLITASNoch keine Bewertungen
- Fire Fighting Robot With AIDokument21 SeitenFire Fighting Robot With AINayomikareddyNoch keine Bewertungen
- Development and Designing of Fire Fighter Robotics Using Cyber SecurityDokument5 SeitenDevelopment and Designing of Fire Fighter Robotics Using Cyber Securitypooja madhurkarNoch keine Bewertungen
- An Autonomous Firefighting Robot: Abstract: The Field of Firefighting Has Long Been ADokument6 SeitenAn Autonomous Firefighting Robot: Abstract: The Field of Firefighting Has Long Been Apooja madhurkarNoch keine Bewertungen
- Fire Fighting Robot With ArtificialDokument7 SeitenFire Fighting Robot With ArtificialLumisense TechnologiesNoch keine Bewertungen
- Fin Irjmets1656864689Dokument4 SeitenFin Irjmets1656864689rassNoch keine Bewertungen
- Fire Extinguisher RobotDokument23 SeitenFire Extinguisher RobotIJRASETPublicationsNoch keine Bewertungen
- Embedded Based Fire Detection and Fighting Robot Using IoT For Industrial EnvironmentDokument4 SeitenEmbedded Based Fire Detection and Fighting Robot Using IoT For Industrial Environmentgn45591Noch keine Bewertungen
- Paper 18-Development of Fire Fighting Robot PDFDokument7 SeitenPaper 18-Development of Fire Fighting Robot PDFKeerthi SanaNoch keine Bewertungen
- Design and Fabrication of Automated Fire Fighting RobotDokument9 SeitenDesign and Fabrication of Automated Fire Fighting RobotIJRASETPublicationsNoch keine Bewertungen
- Review Paper On Arduino Based Fire Fighting Robot-with-cover-page-V2Dokument9 SeitenReview Paper On Arduino Based Fire Fighting Robot-with-cover-page-V2Tiffany DagatanNoch keine Bewertungen
- Fire Fighting Robot Using Arduino and Motor Drivers With Obstacle DetectionDokument3 SeitenFire Fighting Robot Using Arduino and Motor Drivers With Obstacle DetectionEditor IJTSRDNoch keine Bewertungen
- Fire Fighting Robot Using Arduino and Motor Drivers With Obstacle DetectionDokument3 SeitenFire Fighting Robot Using Arduino and Motor Drivers With Obstacle DetectionEditor IJTSRDNoch keine Bewertungen
- Smart Fire-Fighter Cum Oil Tank Cleaner RobotDokument8 SeitenSmart Fire-Fighter Cum Oil Tank Cleaner RobotIJRASETPublicationsNoch keine Bewertungen
- Development and Construction of An Autonomous Firefighting RobotDokument8 SeitenDevelopment and Construction of An Autonomous Firefighting RobotInternational Journal of Innovative Science and Research TechnologyNoch keine Bewertungen
- Fire Fighting RobotDokument5 SeitenFire Fighting RobotInternational Journal of Innovative Science and Research TechnologyNoch keine Bewertungen
- Project - Fire Detection and Extinguishing RobotDokument16 SeitenProject - Fire Detection and Extinguishing RobotRakesh SNoch keine Bewertungen
- SynopsisDokument5 SeitenSynopsis1da20et039.etNoch keine Bewertungen
- Prototype of A Functioning Urban Firefighting DroneDokument22 SeitenPrototype of A Functioning Urban Firefighting DroneInternational Journal of Innovative Science and Research TechnologyNoch keine Bewertungen
- Irjet V10i458Dokument4 SeitenIrjet V10i458leonardo36wNoch keine Bewertungen
- Design and Development of Heavy Drone For Fire Fighting Operation IJERTV9IS060433Dokument5 SeitenDesign and Development of Heavy Drone For Fire Fighting Operation IJERTV9IS060433Haarish RomeoNoch keine Bewertungen
- Review Paper On Arduino Based Fire Fighting RobotDokument8 SeitenReview Paper On Arduino Based Fire Fighting RobotIJRASETPublicationsNoch keine Bewertungen
- Swarm Intelligence Based Fire Fighting RobotDokument6 SeitenSwarm Intelligence Based Fire Fighting RobotIJAERS JOURNALNoch keine Bewertungen
- Ijetae 1214 100Dokument5 SeitenIjetae 1214 100akula pranathiNoch keine Bewertungen
- Turnitin YudaDokument8 SeitenTurnitin YudaYuda IrawanNoch keine Bewertungen
- Ecs Final Report-FasttrackDokument14 SeitenEcs Final Report-Fasttrackpranay kumarNoch keine Bewertungen
- Fire Fighting RobotDokument6 SeitenFire Fighting RobotIJRASETPublicationsNoch keine Bewertungen
- Design and Analysis of Mini Fire Fighting RobotDokument7 SeitenDesign and Analysis of Mini Fire Fighting RobotIJRASETPublicationsNoch keine Bewertungen
- Literature Review On Fire Fighting RobotDokument5 SeitenLiterature Review On Fire Fighting Robotafmzubkeaydllz100% (1)
- Fire Extinguishing Robot Using Arduino MicrocontrollerDokument10 SeitenFire Extinguishing Robot Using Arduino MicrocontrollerSIDDHARTH NAHARNoch keine Bewertungen
- P256 264 PDFDokument9 SeitenP256 264 PDFAamir Majeed BhatNoch keine Bewertungen
- Report 1Dokument66 SeitenReport 1COMPETITION PROJECTSNoch keine Bewertungen
- Automatic Fire Extinguishing Robotic VehicleDokument2 SeitenAutomatic Fire Extinguishing Robotic VehiclerajeshNoch keine Bewertungen
- Ijirt151921 PaperDokument4 SeitenIjirt151921 PaperLE309 Rajashekar MegavathNoch keine Bewertungen
- SR 21705175854Dokument5 SeitenSR 21705175854Brendon GovereNoch keine Bewertungen
- IJAEMAPAPERDOCDokument12 SeitenIJAEMAPAPERDOCGopikaNoch keine Bewertungen
- Babu Banarasi Das National Institute of Technology and Management LucknowDokument11 SeitenBabu Banarasi Das National Institute of Technology and Management LucknowPrajjwalKumarNoch keine Bewertungen
- UGCIJSRSETArduino Based Radar Systemfor Short Range ApplicationsDokument11 SeitenUGCIJSRSETArduino Based Radar Systemfor Short Range ApplicationsasillllllllllllllllllllllllllllllllllNoch keine Bewertungen
- Bluetooth Car Using Arduino: Mini Project SynopsisDokument8 SeitenBluetooth Car Using Arduino: Mini Project SynopsisBEETA107 Anchal SaprooNoch keine Bewertungen
- Chapter Five Conclusions and RecommendationsDokument3 SeitenChapter Five Conclusions and RecommendationsSixtus OkoroNoch keine Bewertungen
- Fire Fighting Car With ArduinoDokument4 SeitenFire Fighting Car With Arduinosotado100% (1)
- Fire Fighting Robot: July 2020Dokument12 SeitenFire Fighting Robot: July 2020kali trackNoch keine Bewertungen
- Design and Manufacture of Indoor Intelligent Fire Fighting RobotDokument4 SeitenDesign and Manufacture of Indoor Intelligent Fire Fighting RobotNakul SambheNoch keine Bewertungen
- journalsgrd,+IJPRSE V2I8 15Dokument4 Seitenjournalsgrd,+IJPRSE V2I8 15Vinay InavoluNoch keine Bewertungen
- Nan Kelsa AithuDokument4 SeitenNan Kelsa Aithu1da20et039.etNoch keine Bewertungen
- Robot Operating System (ROS): The Complete Reference (Volume 6)Von EverandRobot Operating System (ROS): The Complete Reference (Volume 6)Noch keine Bewertungen
- Analysis and Building Using Staad ProDokument1 SeiteAnalysis and Building Using Staad ProAbdul RazzakNoch keine Bewertungen
- Structural Analysis and Design of ResidentialDokument1 SeiteStructural Analysis and Design of ResidentialAbdul RazzakNoch keine Bewertungen
- Structural Design of HospitalDokument1 SeiteStructural Design of HospitalAbdul RazzakNoch keine Bewertungen
- Analysis of Consumers' Desire For Soft Drinks After PlagDokument73 SeitenAnalysis of Consumers' Desire For Soft Drinks After PlagAbdul RazzakNoch keine Bewertungen
- Analysis of Consumers' Desire For Soft DrinksDokument3 SeitenAnalysis of Consumers' Desire For Soft DrinksAbdul RazzakNoch keine Bewertungen
- Big Data Cyber Security PaperDokument3 SeitenBig Data Cyber Security PaperAbdul RazzakNoch keine Bewertungen
- Consumer Behavior Analytics Using Machine Learning AlgorithmsDokument3 SeitenConsumer Behavior Analytics Using Machine Learning AlgorithmsAbdul RazzakNoch keine Bewertungen
- K-Means Clustering PUBLICATIONSDokument2 SeitenK-Means Clustering PUBLICATIONSAbdul RazzakNoch keine Bewertungen
- Introduction To The Project: For The Design of The Structure, The Deadload, Live Loads, Seismic and Wind LoadDokument6 SeitenIntroduction To The Project: For The Design of The Structure, The Deadload, Live Loads, Seismic and Wind LoadAbdul Razzak0% (1)
- Portable Assistive Device For Deaf Dumb and Blind Using AiDokument1 SeitePortable Assistive Device For Deaf Dumb and Blind Using AiAbdul RazzakNoch keine Bewertungen
- GARBAGE Segregation and Monitoring System by Using GSMDokument2 SeitenGARBAGE Segregation and Monitoring System by Using GSMAbdul RazzakNoch keine Bewertungen
- Scania TruckAndBus 2023Dokument403 SeitenScania TruckAndBus 2023Piotr ZiąbkowskiNoch keine Bewertungen
- Parametri TobyDokument111 SeitenParametri TobyZoran MilovicNoch keine Bewertungen
- Project Goals/ ObjectivesDokument51 SeitenProject Goals/ ObjectivesJoyce Abegail De PedroNoch keine Bewertungen
- Advanced Simulation Guidebook Volume II - The High Performance Building Process PDFDokument33 SeitenAdvanced Simulation Guidebook Volume II - The High Performance Building Process PDFomarNoch keine Bewertungen
- ST 010 ISBT 128 Standard Product Description Code Database v6.0.0Dokument34 SeitenST 010 ISBT 128 Standard Product Description Code Database v6.0.0Patrick Ramos100% (1)
- Arzator Rooftop ApenDokument44 SeitenArzator Rooftop ApenEu TuNoch keine Bewertungen
- Lowel LightsDokument80 SeitenLowel LightsSaulo Valley100% (1)
- VW Piezometer Input Calculation Sheet V1.1Dokument5 SeitenVW Piezometer Input Calculation Sheet V1.1Gauri 'tika' Kartika100% (1)
- LibisDokument39 SeitenLibisAngelika CalingasanNoch keine Bewertungen
- SRX5400-SRX5800 Services Gateway DSDokument12 SeitenSRX5400-SRX5800 Services Gateway DSAnonymous rSFHGQIBdFNoch keine Bewertungen
- Know The Escalation Matrix To ReportDokument1 SeiteKnow The Escalation Matrix To ReportHemal GandhiNoch keine Bewertungen
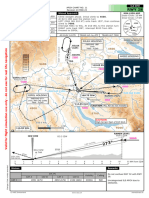
- LSZH Apch11 Rwy28 IlsDokument1 SeiteLSZH Apch11 Rwy28 Ilssamykarim2009Noch keine Bewertungen
- Colphenebswh 1816Dokument2 SeitenColphenebswh 1816vinoth kumar SanthanamNoch keine Bewertungen
- (DOC) Makalah Sistem Endokrin - YENNA PUTRI - Academia - Edu183414Dokument13 Seiten(DOC) Makalah Sistem Endokrin - YENNA PUTRI - Academia - Edu183414dominggus kakaNoch keine Bewertungen
- Search Over 200,000 Products: Firm Grip High Dexterity All Purpose Gloves - LargeDokument4 SeitenSearch Over 200,000 Products: Firm Grip High Dexterity All Purpose Gloves - Largehali10Noch keine Bewertungen
- Turnitin Originality ReportDokument47 SeitenTurnitin Originality ReportStillward Laud Mark-MillsNoch keine Bewertungen
- R&D Division BrochureDokument4 SeitenR&D Division BrochureShai WeissNoch keine Bewertungen
- Pamphlet On Maintenance and Overhauling of Lightning ArresterDokument10 SeitenPamphlet On Maintenance and Overhauling of Lightning ArresterAjay Kumar PoulNoch keine Bewertungen
- G1 Group 1CDokument72 SeitenG1 Group 1CNH SyzlnNoch keine Bewertungen
- Practice Test 3Dokument13 SeitenPractice Test 3Ngân Hà NguyễnNoch keine Bewertungen
- Rigmaster 304 Stainless Steel Fluorescent LuminairesDokument2 SeitenRigmaster 304 Stainless Steel Fluorescent LuminairesErikaGaitanGonzalezNoch keine Bewertungen
- Brake Actuator Instruction - ManualDokument32 SeitenBrake Actuator Instruction - ManualJoeNoch keine Bewertungen
- Astm C-743Dokument4 SeitenAstm C-743IyaadanNoch keine Bewertungen
- Analysis of Business EnvironmentDokument10 SeitenAnalysis of Business Environmentrashmi123vaish50% (2)
- Soliphant T FTM20, FTM21: Technical Information VibronicDokument16 SeitenSoliphant T FTM20, FTM21: Technical Information VibronicmichaelNoch keine Bewertungen
- EE 303 Tutorial 1Dokument19 SeitenEE 303 Tutorial 1Syama SameekshaNoch keine Bewertungen
- Implementation 3-Axis CNC Router For Small Scale Industry: Telkom Applied Science School, Telkom University, IndonesiaDokument6 SeitenImplementation 3-Axis CNC Router For Small Scale Industry: Telkom Applied Science School, Telkom University, IndonesiaAnonymous gzC9adeNoch keine Bewertungen