Das könnte Ihnen auch gefallen
- Introduction To Controlnet With Controllogix: Hands-On Lab WorkbookDokument91 SeitenIntroduction To Controlnet With Controllogix: Hands-On Lab WorkbookisaorsNoch keine Bewertungen
- RSLOGIX5000 Programming A Clear and Concise ReferenceVon EverandRSLOGIX5000 Programming A Clear and Concise ReferenceNoch keine Bewertungen
- 00 - PlantPAx System Design and Estimation Tools v5.0 (en-US)Dokument79 Seiten00 - PlantPAx System Design and Estimation Tools v5.0 (en-US)ArielistoNoch keine Bewertungen
- 1756-HSC Various ConfigurationsDokument6 Seiten1756-HSC Various ConfigurationsPaul Ramos CarcaustoNoch keine Bewertungen
- Supervisory control and data acquisition Third EditionVon EverandSupervisory control and data acquisition Third EditionNoch keine Bewertungen
- 1756 Um016a en P PDFDokument196 Seiten1756 Um016a en P PDFandrea19711971Noch keine Bewertungen
- Embedded Hypervisor The Ultimate Step-By-Step GuideVon EverandEmbedded Hypervisor The Ultimate Step-By-Step GuideNoch keine Bewertungen
- plcslc150 Ocr PDFDokument317 Seitenplcslc150 Ocr PDFluisgab87Noch keine Bewertungen
- Process Control and Industrial Automation Complete Self-Assessment GuideVon EverandProcess Control and Industrial Automation Complete Self-Assessment GuideNoch keine Bewertungen
- ABT-1756-TSJ60 2017-07.TextMarkDokument366 SeitenABT-1756-TSJ60 2017-07.TextMarkMarius MihaescuNoch keine Bewertungen
- Logix 5000 Controllers Design Considerations: Reference ManualDokument130 SeitenLogix 5000 Controllers Design Considerations: Reference ManualHawk MrNoch keine Bewertungen
- 01 PlantPAx 4.1 Intro To Process System For Oper and Engr LabDokument102 Seiten01 PlantPAx 4.1 Intro To Process System For Oper and Engr Labpisoy30392Noch keine Bewertungen
- Tutorial 02 PLC PDFDokument23 SeitenTutorial 02 PLC PDFTete GoriNoch keine Bewertungen
- CoTMS-59 FactoryTalk Historian Site Edition Advanced LabDokument90 SeitenCoTMS-59 FactoryTalk Historian Site Edition Advanced LabJose SierraNoch keine Bewertungen
- InView AOI Sample Code User InstructionsDokument55 SeitenInView AOI Sample Code User InstructionsRrhh EstNoch keine Bewertungen
- Plant PAX Foundation Fieldbus InterfaseDokument291 SeitenPlant PAX Foundation Fieldbus InterfaseGabriel VelardeNoch keine Bewertungen
- LAB Constructor de Arquitectura Integrada (IAB)Dokument249 SeitenLAB Constructor de Arquitectura Integrada (IAB)Enrique RomeroNoch keine Bewertungen
- Industrial Communication SystemsDokument339 SeitenIndustrial Communication Systemspvtrong.sdh212Noch keine Bewertungen
- Rockwell Automation Application Content: Machine Builder LibrariesDokument42 SeitenRockwell Automation Application Content: Machine Builder LibrariesLuis Miguel Rios CuentasNoch keine Bewertungen
- What Is FactoryTalk Activation Video ScriptDokument5 SeitenWhat Is FactoryTalk Activation Video ScriptEletrica ManutNoch keine Bewertungen
- MotionDokument110 SeitenMotionsonvv2412100% (1)
- Networx: Rsnetworx For Devicenet Getting Results GuideDokument62 SeitenNetworx: Rsnetworx For Devicenet Getting Results GuideCarlos MusellaNoch keine Bewertungen
- Simple Motion Control Via Ethernet/Ip With Kinetix 300 Drives Connected Components Building BlockDokument52 SeitenSimple Motion Control Via Ethernet/Ip With Kinetix 300 Drives Connected Components Building BlockRavi ArunNoch keine Bewertungen
- How To Setup and Run RSLogix Emulation (SLC500&Micrologix 1000)Dokument4 SeitenHow To Setup and Run RSLogix Emulation (SLC500&Micrologix 1000)hzq1eNoch keine Bewertungen
- PLC Primer PDFDokument16 SeitenPLC Primer PDFAnish GoswamiNoch keine Bewertungen
- Enet At007 - en PDokument94 SeitenEnet At007 - en PAkshay AryaNoch keine Bewertungen
- Factorytalk Assetcentre System Design and Implementation: Lab BookDokument150 SeitenFactorytalk Assetcentre System Design and Implementation: Lab BookIsaac MendibleNoch keine Bewertungen
- CompactlogixDokument56 SeitenCompactlogixtazjuan1Noch keine Bewertungen
- TechED EMEA 2019 - VZ10 - FactoryTalk® View SE Redundancy, Configuration and MaintenanceDokument17 SeitenTechED EMEA 2019 - VZ10 - FactoryTalk® View SE Redundancy, Configuration and Maintenancemrb20Noch keine Bewertungen
- FactoryTalk View SE v5 0 (CPR9) Distributed System Design Considerations 2007 12Dokument41 SeitenFactoryTalk View SE v5 0 (CPR9) Distributed System Design Considerations 2007 12Jhon Ríos100% (1)
- Høgskolen I Telemark: Bachelor I IngeniørfagDokument30 SeitenHøgskolen I Telemark: Bachelor I IngeniørfagAnonymous bvuCxCnQ9Noch keine Bewertungen
- Ra Um003 - en P PDFDokument209 SeitenRa Um003 - en P PDFwillieNoch keine Bewertungen
- As IEC 61131.2-2004 Programmable Controllers Equipment Requirements and TestsDokument14 SeitenAs IEC 61131.2-2004 Programmable Controllers Equipment Requirements and TestsSAI Global - APACNoch keine Bewertungen
- Connecting Excel To ControlLogix - PLCdev PDFDokument10 SeitenConnecting Excel To ControlLogix - PLCdev PDFadi irawanNoch keine Bewertungen
- L03 - Understanding Advanced Programming - Lab ManualDokument74 SeitenL03 - Understanding Advanced Programming - Lab ManualWesley Ponce CamarenaNoch keine Bewertungen
- L04 BasicPLCProgramming PDFDokument88 SeitenL04 BasicPLCProgramming PDFJose RequenaNoch keine Bewertungen
- User Manual ControlLogix 5580Dokument164 SeitenUser Manual ControlLogix 5580Nixius0% (1)
- PanelView Plus Machine-Level Application Topics - Lab AvanzadoDokument144 SeitenPanelView Plus Machine-Level Application Topics - Lab AvanzadoBenjhy Jordan Castillo ValeraNoch keine Bewertungen
- InfoPLC Net Studio5000 V21 KTACDokument51 SeitenInfoPLC Net Studio5000 V21 KTACReynan Giacomin Borlini100% (1)
- Plant PaxDokument348 SeitenPlant PaxCharlie Bustamante BaronaNoch keine Bewertungen
- Stratix 8000 Hardware User ManualDokument92 SeitenStratix 8000 Hardware User ManualJesus Rebaza RomanNoch keine Bewertungen
- Quickstart For RecipePlusDokument24 SeitenQuickstart For RecipePlusSebastian LeonNoch keine Bewertungen
- L07 - Integrated Motion On Ethernet/IP - Basic Lab: For Classroom Use Only!Dokument58 SeitenL07 - Integrated Motion On Ethernet/IP - Basic Lab: For Classroom Use Only!cuongvcs100% (1)
- Unit1 2Dokument30 SeitenUnit1 2CHETAN SETIYANoch keine Bewertungen
- DE04 Panel View 5000Dokument44 SeitenDE04 Panel View 5000Alejandro Almonacid RivasNoch keine Bewertungen
- Rockwell Automation TechED 2017 - SY29 - Moving Toward A Connected Enterprise by Modernizing Your Control and Information Systems Lab ManualDokument113 SeitenRockwell Automation TechED 2017 - SY29 - Moving Toward A Connected Enterprise by Modernizing Your Control and Information Systems Lab ManualIsaac MendibleNoch keine Bewertungen
- Transaction ManagerDokument62 SeitenTransaction ManagerAnonymous 5cMeyYyxhNoch keine Bewertungen
- L01 - PlantPAx DCS Eficiencia e Rapidez em Execucao de Projetos - Lab ManualDokument139 SeitenL01 - PlantPAx DCS Eficiencia e Rapidez em Execucao de Projetos - Lab ManualLeon RochaNoch keine Bewertungen
- L13 - Studio 5000 and Logix AdvancedDokument35 SeitenL13 - Studio 5000 and Logix AdvancedcuongvcsNoch keine Bewertungen
- AddOn (P ValveMO)Dokument52 SeitenAddOn (P ValveMO)carbono980Noch keine Bewertungen
- Configuracion E300Dokument25 SeitenConfiguracion E300Alejandro Almonacid RivasNoch keine Bewertungen
- 01 3 Mechatronics LabDokument6 Seiten01 3 Mechatronics LabSangeetha VenkatNoch keine Bewertungen
- Two Tank MPCDokument39 SeitenTwo Tank MPCEdo RossNoch keine Bewertungen
- OPC OverviewDokument16 SeitenOPC OverviewFrancesHsiehNoch keine Bewertungen
- Stratix 2500 Lightly Managed Switches: User ManualDokument156 SeitenStratix 2500 Lightly Managed Switches: User ManualsiemensNoch keine Bewertungen
- The Codesys Visualization: Supplement To The User Manual For PLC Programming With Codesys 2.3Dokument67 SeitenThe Codesys Visualization: Supplement To The User Manual For PLC Programming With Codesys 2.3veintimillaaNoch keine Bewertungen
- Man PowerFlex 755 8ChDokument50 SeitenMan PowerFlex 755 8ChJorge Gustavo GoyecheaNoch keine Bewertungen
- Chapter 1Dokument51 SeitenChapter 1yaqoobNoch keine Bewertungen
- TOEPYAIGA5002 ProgrammingDokument526 SeitenTOEPYAIGA5002 ProgrammingipasaNoch keine Bewertungen
- TOEPYAIGA5001Maintenance & TroubleshootingDokument282 SeitenTOEPYAIGA5001Maintenance & TroubleshootingipasaNoch keine Bewertungen
- TOEPC71061752Installation & Primary Operation PDFDokument198 SeitenTOEPC71061752Installation & Primary Operation PDFipasaNoch keine Bewertungen
- Proface HMI Selection Guide March 2008Dokument42 SeitenProface HMI Selection Guide March 2008ipasaNoch keine Bewertungen
- Omega 1Dokument108 SeitenOmega 1ipasaNoch keine Bewertungen
- Phy301SolvedPaperSpring2010www Vuattach NingDokument14 SeitenPhy301SolvedPaperSpring2010www Vuattach NingAbdul Aziz ButtNoch keine Bewertungen
- Magnetic Levitation System (Maglev) : Installation ManualDokument19 SeitenMagnetic Levitation System (Maglev) : Installation ManualgabbiyronnyNoch keine Bewertungen
- E560 CVD03 DSDokument5 SeitenE560 CVD03 DSdwie wijayantoNoch keine Bewertungen
- 3500 22m Transient Data Interface Manual 161580-01Dokument82 Seiten3500 22m Transient Data Interface Manual 161580-01macakafkaNoch keine Bewertungen
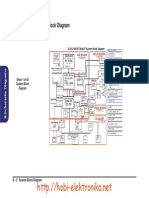
- Toshiba Qosmio x755 Compal Prgaa La7191p Laptop SchematicsDokument36 SeitenToshiba Qosmio x755 Compal Prgaa La7191p Laptop SchematicsMario Rodriguez JuradoNoch keine Bewertungen
- Biasing Tubes AmplifiersDokument9 SeitenBiasing Tubes AmplifiersjlguedesNoch keine Bewertungen
- Bat 41Dokument11 SeitenBat 41Tanko SuleNoch keine Bewertungen
- Toshiba Strata DK 24-56-96 ManualDokument676 SeitenToshiba Strata DK 24-56-96 ManualRobert MerrittNoch keine Bewertungen
- Fwhomfbrhi 27435 FWHOMFBRHIDokument19 SeitenFwhomfbrhi 27435 FWHOMFBRHIAnu AnushaNoch keine Bewertungen
- Insat Satellite Based Data Collection & Tracking System For Ocean Data BuoysDokument24 SeitenInsat Satellite Based Data Collection & Tracking System For Ocean Data BuoysAshwini kumarNoch keine Bewertungen
- Vlsi Design Unit 3 2019Dokument34 SeitenVlsi Design Unit 3 2019Ishan Mahendra PatelNoch keine Bewertungen
- 5234Dokument22 Seiten5234PanchitocamNoch keine Bewertungen
- 15ecl48-VTU-raghudathesh-Instrumentation Amplifier PDFDokument6 Seiten15ecl48-VTU-raghudathesh-Instrumentation Amplifier PDFraghudatheshgpNoch keine Bewertungen
- Evolv DNA 75 Color: 75 Watt Variable Power Module With Temperature Protection and USBDokument12 SeitenEvolv DNA 75 Color: 75 Watt Variable Power Module With Temperature Protection and USBGuido CatelloNoch keine Bewertungen
- CCNA1v3 - Mod04 - Cable TestingDokument32 SeitenCCNA1v3 - Mod04 - Cable Testingjoy7825Noch keine Bewertungen
- Sony - STR Za1000es, STR Za2000es, STR Za3000esDokument126 SeitenSony - STR Za1000es, STR Za2000es, STR Za3000esikarpatyNoch keine Bewertungen
- Generation of ComputersDokument10 SeitenGeneration of ComputersWINORLOSENoch keine Bewertungen
- Welding Power SupplyDokument3 SeitenWelding Power SupplyDeepak Kumar Kant KesriNoch keine Bewertungen
- Pa&pbDokument5 SeitenPa&pbmohamed100% (1)
- EC GATE 2017 Set I Key SolutionDokument31 SeitenEC GATE 2017 Set I Key SolutionRAMAKRISHNA VNoch keine Bewertungen
- Zse 30Dokument14 SeitenZse 30awttceoNoch keine Bewertungen
- MMTDokument36 SeitenMMTAvoyNoch keine Bewertungen
- Service Manual: SSD - Alpha10Dokument135 SeitenService Manual: SSD - Alpha10DenNoch keine Bewertungen
- PLCDokument26 SeitenPLCSamNoch keine Bewertungen
- Datasheet 78211000 PDFDokument1 SeiteDatasheet 78211000 PDFnasty_plusNoch keine Bewertungen
- Slot AntennaDokument15 SeitenSlot AntennaBhavin V KakaniNoch keine Bewertungen
- PJ2500M-C, PJ3000HE, PJ3500M-C, PJ4000U-K & PJ5000U-K: User Manual Volume 2: Technical AppendixDokument132 SeitenPJ2500M-C, PJ3000HE, PJ3500M-C, PJ4000U-K & PJ5000U-K: User Manual Volume 2: Technical AppendixErickNoch keine Bewertungen
- VNX Architectural Overview Final ProducedDokument40 SeitenVNX Architectural Overview Final ProducedBaiyant SinghNoch keine Bewertungen
- F0af6 Clevo W830T W840TDokument46 SeitenF0af6 Clevo W830T W840TOsvaldo LucianiNoch keine Bewertungen
- Ece MagazineDokument73 SeitenEce MagazineA C MADHESWARANNoch keine Bewertungen
- No Bad Parts: Healing Trauma and Restoring Wholeness with the Internal Family Systems ModelVon EverandNo Bad Parts: Healing Trauma and Restoring Wholeness with the Internal Family Systems ModelBewertung: 4.5 von 5 Sternen4.5/5 (5)
- The Coaching Habit: Say Less, Ask More & Change the Way You Lead ForeverVon EverandThe Coaching Habit: Say Less, Ask More & Change the Way You Lead ForeverBewertung: 4.5 von 5 Sternen4.5/5 (186)
- The 7 Habits of Highly Effective People: The Infographics EditionVon EverandThe 7 Habits of Highly Effective People: The Infographics EditionBewertung: 4 von 5 Sternen4/5 (2475)
- Think This, Not That: 12 Mindshifts to Breakthrough Limiting Beliefs and Become Who You Were Born to BeVon EverandThink This, Not That: 12 Mindshifts to Breakthrough Limiting Beliefs and Become Who You Were Born to BeBewertung: 2 von 5 Sternen2/5 (1)
- Summary of Atomic Habits: An Easy and Proven Way to Build Good Habits and Break Bad Ones by James ClearVon EverandSummary of Atomic Habits: An Easy and Proven Way to Build Good Habits and Break Bad Ones by James ClearBewertung: 4.5 von 5 Sternen4.5/5 (560)
- The 5 Second Rule: Transform your Life, Work, and Confidence with Everyday CourageVon EverandThe 5 Second Rule: Transform your Life, Work, and Confidence with Everyday CourageBewertung: 5 von 5 Sternen5/5 (10)
- Eat That Frog!: 21 Great Ways to Stop Procrastinating and Get More Done in Less TimeVon EverandEat That Frog!: 21 Great Ways to Stop Procrastinating and Get More Done in Less TimeBewertung: 4.5 von 5 Sternen4.5/5 (3226)
- Indistractable: How to Control Your Attention and Choose Your LifeVon EverandIndistractable: How to Control Your Attention and Choose Your LifeBewertung: 3 von 5 Sternen3/5 (5)
- Summary of Dan Martell's Buy Back Your TimeVon EverandSummary of Dan Martell's Buy Back Your TimeBewertung: 5 von 5 Sternen5/5 (1)
- Quantum Success: 7 Essential Laws for a Thriving, Joyful, and Prosperous Relationship with Work and MoneyVon EverandQuantum Success: 7 Essential Laws for a Thriving, Joyful, and Prosperous Relationship with Work and MoneyBewertung: 5 von 5 Sternen5/5 (38)
- Summary: The Gap and the Gain: The High Achievers' Guide to Happiness, Confidence, and Success by Dan Sullivan and Dr. Benjamin Hardy: Key Takeaways, Summary & AnalysisVon EverandSummary: The Gap and the Gain: The High Achievers' Guide to Happiness, Confidence, and Success by Dan Sullivan and Dr. Benjamin Hardy: Key Takeaways, Summary & AnalysisBewertung: 5 von 5 Sternen5/5 (4)
- Growth Mindset: 7 Secrets to Destroy Your Fixed Mindset and Tap into Your Psychology of Success with Self Discipline, Emotional Intelligence and Self ConfidenceVon EverandGrowth Mindset: 7 Secrets to Destroy Your Fixed Mindset and Tap into Your Psychology of Success with Self Discipline, Emotional Intelligence and Self ConfidenceBewertung: 4.5 von 5 Sternen4.5/5 (562)
- Fascinate: How to Make Your Brand Impossible to ResistVon EverandFascinate: How to Make Your Brand Impossible to ResistBewertung: 5 von 5 Sternen5/5 (1)
- The One Thing: The Surprisingly Simple Truth Behind Extraordinary ResultsVon EverandThe One Thing: The Surprisingly Simple Truth Behind Extraordinary ResultsBewertung: 4.5 von 5 Sternen4.5/5 (709)
- The Compound Effect by Darren Hardy - Book Summary: Jumpstart Your Income, Your Life, Your SuccessVon EverandThe Compound Effect by Darren Hardy - Book Summary: Jumpstart Your Income, Your Life, Your SuccessBewertung: 5 von 5 Sternen5/5 (456)
- Own Your Past Change Your Future: A Not-So-Complicated Approach to Relationships, Mental Health & WellnessVon EverandOwn Your Past Change Your Future: A Not-So-Complicated Approach to Relationships, Mental Health & WellnessBewertung: 5 von 5 Sternen5/5 (85)
- The Millionaire Fastlane: Crack the Code to Wealth and Live Rich for a LifetimeVon EverandThe Millionaire Fastlane: Crack the Code to Wealth and Live Rich for a LifetimeBewertung: 4.5 von 5 Sternen4.5/5 (2)
- Mastering Productivity: Everything You Need to Know About Habit FormationVon EverandMastering Productivity: Everything You Need to Know About Habit FormationBewertung: 4.5 von 5 Sternen4.5/5 (23)
- Summary: The 5AM Club: Own Your Morning. Elevate Your Life. by Robin Sharma: Key Takeaways, Summary & AnalysisVon EverandSummary: The 5AM Club: Own Your Morning. Elevate Your Life. by Robin Sharma: Key Takeaways, Summary & AnalysisBewertung: 4.5 von 5 Sternen4.5/5 (22)
- Leadership and Self-Deception: Getting out of the BoxVon EverandLeadership and Self-Deception: Getting out of the BoxBewertung: 5 von 5 Sternen5/5 (156)
- Summary of Steven Bartlett's The Diary of a CEOVon EverandSummary of Steven Bartlett's The Diary of a CEOBewertung: 5 von 5 Sternen5/5 (4)
- Coach Builder: How to Turn Your Expertise Into a Profitable Coaching CareerVon EverandCoach Builder: How to Turn Your Expertise Into a Profitable Coaching CareerBewertung: 5 von 5 Sternen5/5 (2)
- Uptime: A Practical Guide to Personal Productivity and WellbeingVon EverandUptime: A Practical Guide to Personal Productivity and WellbeingNoch keine Bewertungen
- Summary of Leaders Eat Last: Why Some Teams Pull Together and Others Don't by Simon SinekVon EverandSummary of Leaders Eat Last: Why Some Teams Pull Together and Others Don't by Simon SinekBewertung: 4.5 von 5 Sternen4.5/5 (142)
- Think Faster, Talk Smarter: How to Speak Successfully When You're Put on the SpotVon EverandThink Faster, Talk Smarter: How to Speak Successfully When You're Put on the SpotBewertung: 5 von 5 Sternen5/5 (1)
- Rich Bitch: A Simple 12-Step Plan for Getting Your Financial Life Together . . . FinallyVon EverandRich Bitch: A Simple 12-Step Plan for Getting Your Financial Life Together . . . FinallyBewertung: 4 von 5 Sternen4/5 (8)
- Summary: Hidden Potential: The Science of Achieving Greater Things By Adam Grant: Key Takeaways, Summary and AnalysisVon EverandSummary: Hidden Potential: The Science of Achieving Greater Things By Adam Grant: Key Takeaways, Summary and AnalysisBewertung: 4.5 von 5 Sternen4.5/5 (15)