Das könnte Ihnen auch gefallen
- Robotic Arm Based On Internet of Things (Iot) : Under The Guidance ofDokument15 SeitenRobotic Arm Based On Internet of Things (Iot) : Under The Guidance ofsharon. thellaNoch keine Bewertungen
- Obstacle Avoiding Robot ReportDokument32 SeitenObstacle Avoiding Robot ReportBroNoch keine Bewertungen
- GSM Based Fire Fighting RobotDokument35 SeitenGSM Based Fire Fighting RobotRaushanVijaySingh100% (1)
- Aqua Drone Ieee PaperDokument3 SeitenAqua Drone Ieee PaperAkash ShahuNoch keine Bewertungen
- Road Side Dust Cleaner PDFDokument5 SeitenRoad Side Dust Cleaner PDFSURAJ NAGNoch keine Bewertungen
- Abhi Baby Cry DetectorDokument22 SeitenAbhi Baby Cry DetectorÃbhilâśh RêddÿNoch keine Bewertungen
- Automated Smart Card Car Parking SystemDokument34 SeitenAutomated Smart Card Car Parking SystemAvishek Chakraborty100% (1)
- Snake Robot ReportDokument30 SeitenSnake Robot ReportAditya Vidolkar100% (1)
- New Seminar ReportDokument20 SeitenNew Seminar ReportThockanattu Varkey MathewNoch keine Bewertungen
- Synopsis On Multi Purpose Agricultural RobotDokument10 SeitenSynopsis On Multi Purpose Agricultural Robotpavan pujarNoch keine Bewertungen
- Obstacle Avoiding RobotDokument14 SeitenObstacle Avoiding RobotAditya KumarNoch keine Bewertungen
- Voice Based Notice Board Using Android ApplicationDokument17 SeitenVoice Based Notice Board Using Android ApplicationBiswajitNoch keine Bewertungen
- Manhole Monitoring SystemDokument23 SeitenManhole Monitoring SystemnikhilNoch keine Bewertungen
- Title GSM Based Fire and Smoke DetectionDokument49 SeitenTitle GSM Based Fire and Smoke Detectionmark lumbresNoch keine Bewertungen
- Project Final Report On Home AutomationDokument29 SeitenProject Final Report On Home AutomationSubham PalNoch keine Bewertungen
- Project ReportDokument65 SeitenProject ReportMusical world100% (1)
- Voice Controlled Robot CarDokument28 SeitenVoice Controlled Robot CarRajeev SinghaniyaNoch keine Bewertungen
- S124-Solar Based Mobile Charger For Rural AreasDokument4 SeitenS124-Solar Based Mobile Charger For Rural AreasYellaturi Siva Kishore ReddyNoch keine Bewertungen
- Intelligent System For Toxic Gas Detection Using GSMDokument36 SeitenIntelligent System For Toxic Gas Detection Using GSMstalin882657% (7)
- Floor Cleaning Robot Project ReportDokument53 SeitenFloor Cleaning Robot Project Reportprabhu rachutiNoch keine Bewertungen
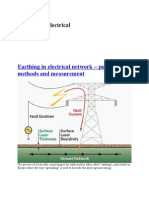
- Earthing in Electrical Network - Purpose, Methods and MeasurementDokument12 SeitenEarthing in Electrical Network - Purpose, Methods and MeasurementShah JayNoch keine Bewertungen
- Report (Vaishnavi)Dokument46 SeitenReport (Vaishnavi)Vaishnavi BNoch keine Bewertungen
- Report 2Dokument32 SeitenReport 2Gopal SinghNoch keine Bewertungen
- Bharath Fire Fighting RobotDokument43 SeitenBharath Fire Fighting RobotDebojit DasNoch keine Bewertungen
- E Notice Board - 2Dokument4 SeitenE Notice Board - 2Magical MKNoch keine Bewertungen
- Automatic Irrigation System SynopsisDokument5 SeitenAutomatic Irrigation System SynopsisASHUTOSH SRIVASTAVANoch keine Bewertungen
- Smart Dustbin For Smart CityDokument11 SeitenSmart Dustbin For Smart CityBommaraju Yogeswar krishna0% (1)
- Voice Controlled Home AutomationDokument29 SeitenVoice Controlled Home AutomationAbhijit PattnaikNoch keine Bewertungen
- SMS Based Automatic Two Wheeler Locking SystemDokument42 SeitenSMS Based Automatic Two Wheeler Locking SystemmboomiNoch keine Bewertungen
- Index: TitleDokument23 SeitenIndex: TitleAtharva ThakareNoch keine Bewertungen
- Electric Lineman SafetyDokument10 SeitenElectric Lineman SafetySandhya Rani ChagamreddyNoch keine Bewertungen
- 150+ Electronics Projects For Engineering Students: Learn Tutorials DIY Product Reviews Guides & Howto AboutDokument35 Seiten150+ Electronics Projects For Engineering Students: Learn Tutorials DIY Product Reviews Guides & Howto AboutAster Takele OfficialNoch keine Bewertungen
- Aurdino Voting MachineDokument70 SeitenAurdino Voting MachinepavithraNoch keine Bewertungen
- Servo Based 5 Axis Robotic Arm Project ReportDokument38 SeitenServo Based 5 Axis Robotic Arm Project ReportRobo India100% (1)
- Major Project Shopping TrolleyDokument50 SeitenMajor Project Shopping TrolleyRohith SharmaNoch keine Bewertungen
- Project Report On Pick and Place RobotDokument20 SeitenProject Report On Pick and Place RobotRanvijaySharma0% (2)
- IoT Based Car Parking SystemDokument3 SeitenIoT Based Car Parking SystemInternational Journal of Innovative Science and Research TechnologyNoch keine Bewertungen
- Fire Alarm Circuit at Low CostDokument14 SeitenFire Alarm Circuit at Low CostBRAHMA AAKUMAIIA0% (1)
- Nano Ic EngineDokument12 SeitenNano Ic EngineRahul SinhaNoch keine Bewertungen
- Design of Dust Collector For Rear Wheel of Four-WheelerDokument4 SeitenDesign of Dust Collector For Rear Wheel of Four-WheelerShashank NaikNoch keine Bewertungen
- Automatic Railway Gate Control SystemDokument26 SeitenAutomatic Railway Gate Control Systemprakhar agarwalNoch keine Bewertungen
- Single Axis Solar Tracking System Using Microcontroller (ATmega328) and Servo MotorDokument4 SeitenSingle Axis Solar Tracking System Using Microcontroller (ATmega328) and Servo MotorJASH MATHEWNoch keine Bewertungen
- Coin Based Water Controlling SystemDokument34 SeitenCoin Based Water Controlling SystemSanthosh Guduru75% (4)
- Diamond The Ultimate SemiconductorDokument53 SeitenDiamond The Ultimate SemiconductorSHREYA GUDDUNoch keine Bewertungen
- Modification of River Cleaning MachineDokument5 SeitenModification of River Cleaning MachineIJRASETPublicationsNoch keine Bewertungen
- Industrial Boiler Flame Remote Adjustment SystemDokument5 SeitenIndustrial Boiler Flame Remote Adjustment SystemChandra Sekar100% (1)
- Government Polytechnic College Nedumangadu: Snapdragon ProcessorsDokument17 SeitenGovernment Polytechnic College Nedumangadu: Snapdragon ProcessorspremamohanNoch keine Bewertungen
- Robotics Monitoring of Power SystemDokument13 SeitenRobotics Monitoring of Power SystemAkshay Shinde100% (2)
- LandmineDokument17 SeitenLandminePooja GNoch keine Bewertungen
- Automatic Toll CollectionDokument27 SeitenAutomatic Toll CollectionRakibul HassanNoch keine Bewertungen
- Final ReportDokument18 SeitenFinal ReportYusha Patel100% (1)
- Iot Based Smart Electricity Meter and Power Theft DetectionDokument6 SeitenIot Based Smart Electricity Meter and Power Theft Detectionhamed razaNoch keine Bewertungen
- F L8 TA 202 NC Part ProgrammingDokument4 SeitenF L8 TA 202 NC Part ProgrammingAqsa Khanam0% (1)
- Ijem V7 N6 5 PDFDokument9 SeitenIjem V7 N6 5 PDFManoj ManuNoch keine Bewertungen
- Hand Gestureand Voice Controlled Smart VehicleDokument5 SeitenHand Gestureand Voice Controlled Smart VehicleSAHITHLAL HOWDEKARNoch keine Bewertungen
- AbhishekDokument13 SeitenAbhishekAbhishek ChettyNoch keine Bewertungen
- Android Controlled Bluetooth RobotDokument15 SeitenAndroid Controlled Bluetooth RobotSuyash BansalNoch keine Bewertungen
- Arduino Based Voice Controlled Robot: Aditya Chaudhry, Manas Batra, Prakhar Gupta, Sahil Lamba, Suyash GuptaDokument3 SeitenArduino Based Voice Controlled Robot: Aditya Chaudhry, Manas Batra, Prakhar Gupta, Sahil Lamba, Suyash Guptaabhishek kumarNoch keine Bewertungen
- Distance Controlled Rescue and Security Mobile RobotDokument6 SeitenDistance Controlled Rescue and Security Mobile Robotmasud1470Noch keine Bewertungen
- Distance Controlled Rescue and Security Mobile RobotDokument6 SeitenDistance Controlled Rescue and Security Mobile Robotmidhuna94Noch keine Bewertungen
- PropertiesDokument7 SeitenProperties焦婷Noch keine Bewertungen
- Gesture Controlled Bluetooth Speaker Using ArduinoDokument4 SeitenGesture Controlled Bluetooth Speaker Using ArduinoChandrashekhar Mishra67% (3)
- Information TechnologyDokument22 SeitenInformation TechnologyAnshul RawatNoch keine Bewertungen
- BT Inter Phone User ManualDokument15 SeitenBT Inter Phone User ManualAnnamaria Gal100% (1)
- Track en Trace ManualDokument6 SeitenTrack en Trace ManualO-Javier M-ParraNoch keine Bewertungen
- MOKO Beacon Standard APP User Maunal - V1.1Dokument46 SeitenMOKO Beacon Standard APP User Maunal - V1.1Maxi BraunNoch keine Bewertungen
- I+ME Actia PassThru XS Driverpack 2.07wDokument4 SeitenI+ME Actia PassThru XS Driverpack 2.07wJose AGNoch keine Bewertungen
- S850+ UserManualENGDokument50 SeitenS850+ UserManualENGvlavureNoch keine Bewertungen
- E104-BT5040U User Manual: nRF52840 USB-Type Bluetooth ModuleDokument15 SeitenE104-BT5040U User Manual: nRF52840 USB-Type Bluetooth ModulePhOeNiXNoch keine Bewertungen
- Panasonic Hair Styler User Manual Model No. Eh8461 Presented To: Mam SarahDokument31 SeitenPanasonic Hair Styler User Manual Model No. Eh8461 Presented To: Mam Sarahmeshoo123Noch keine Bewertungen
- Mc36 Specification SheetDokument2 SeitenMc36 Specification Sheetetud3clNoch keine Bewertungen
- E3 True Wireless Earphones ManualDokument6 SeitenE3 True Wireless Earphones ManualIgoy GiyoNoch keine Bewertungen
- ParlantesDokument8 SeitenParlantesjopsueNoch keine Bewertungen
- Ble 101Dokument105 SeitenBle 101Daniel TelloNoch keine Bewertungen
- Refference Technical Seminar TemplateDokument22 SeitenRefference Technical Seminar TemplateChutki DevarakondaNoch keine Bewertungen
- SAEON A Pocket Size Safety Alarm System For Emergency - HATULANDokument34 SeitenSAEON A Pocket Size Safety Alarm System For Emergency - HATULANKarl Louie PabustanNoch keine Bewertungen
- Computer Education Class 8 - Federal BoardDokument79 SeitenComputer Education Class 8 - Federal Boardshkt.ayazNoch keine Bewertungen
- Audi 0B5 TPI 2039534 - Repair Instructions (By Keldo)Dokument9 SeitenAudi 0B5 TPI 2039534 - Repair Instructions (By Keldo)Keldo Gliana100% (3)
- Geobeacon Receiver: Release NotesDokument4 SeitenGeobeacon Receiver: Release NotesAura Yesenia SarmientoNoch keine Bewertungen
- IT Catalogue 2014Dokument9 SeitenIT Catalogue 2014Vishnu Prakash SinghNoch keine Bewertungen
- YUYANGKING Controller User Manual Bluetooth VersionDokument8 SeitenYUYANGKING Controller User Manual Bluetooth VersionMuhd Fitri Mohd JumatNoch keine Bewertungen
- Protection Relays and Controls: DescriptionDokument2 SeitenProtection Relays and Controls: DescriptionJeff BartNoch keine Bewertungen
- Jeep Wireless Speaker: User GuideDokument11 SeitenJeep Wireless Speaker: User GuideDamian Huitzil CedilloNoch keine Bewertungen
- Quick Start GuideDokument62 SeitenQuick Start Guidegardener10Noch keine Bewertungen
- Lc70 Spec Data Aug2020Dokument2 SeitenLc70 Spec Data Aug2020Chathura Priyankara WijayarathnaNoch keine Bewertungen
- APD5 Install en RevFDokument48 SeitenAPD5 Install en RevFJavier Khan SánchezNoch keine Bewertungen
- JDSU 6000 - Platform - ENG PDFDokument204 SeitenJDSU 6000 - Platform - ENG PDFhau lvNoch keine Bewertungen
- Manual BMW Ace3 enDokument23 SeitenManual BMW Ace3 enoplcapitalinvestmentsNoch keine Bewertungen
- Unit 4Dokument47 SeitenUnit 4A21126512117 SUKALA ABHIRAMNoch keine Bewertungen
- Salvation of The Child Stuck Into The Borehole PAPER ID: 19011Dokument21 SeitenSalvation of The Child Stuck Into The Borehole PAPER ID: 19011buvi RKNoch keine Bewertungen