Das könnte Ihnen auch gefallen
- #Apostila Química Zero-1Dokument35 Seiten#Apostila Química Zero-1cristina100% (1)
- Testes Resolvidos de Maquinas Eletricas IselDokument41 SeitenTestes Resolvidos de Maquinas Eletricas IselFábio Ferreira100% (1)
- Estudo EólicaDokument14 SeitenEstudo EólicaThaís CamposNoch keine Bewertungen
- Desenho Técnico BásicoDokument145 SeitenDesenho Técnico BásicoOtávio Henrique100% (13)
- Relatorio de Fisico QuimicaDokument15 SeitenRelatorio de Fisico QuimicaAna CalmonNoch keine Bewertungen
- EstabilidadeDokument7 SeitenEstabilidadestimella benicioNoch keine Bewertungen
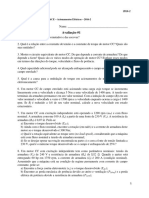
- Ace Av1 2016 2Dokument3 SeitenAce Av1 2016 2alan_smoNoch keine Bewertungen
- Aula15 - MaqCC - Parte04 PDFDokument39 SeitenAula15 - MaqCC - Parte04 PDFGilson JuniorNoch keine Bewertungen
- 05 - GCC - Curva de Magnetização e Regulação de TensãoDokument3 Seiten05 - GCC - Curva de Magnetização e Regulação de TensãoZTE TREZENoch keine Bewertungen
- ResumoDokument10 SeitenResumoDiogo LandiNoch keine Bewertungen
- Máquina CCDokument27 SeitenMáquina CCÁlvaro CamposNoch keine Bewertungen
- Conversores CC - Curso BásicoDokument10 SeitenConversores CC - Curso BásicoMatthew WarrenNoch keine Bewertungen
- Acionamento de Máquinas Elétricas: WBA0300 - v1.0Dokument29 SeitenAcionamento de Máquinas Elétricas: WBA0300 - v1.0Vinicius PassosNoch keine Bewertungen
- Reostato Partida MCCDokument3 SeitenReostato Partida MCCPaulo SouzaNoch keine Bewertungen
- Lista de Exercícios 2 - Máquinas CC - RevisadaDokument3 SeitenLista de Exercícios 2 - Máquinas CC - RevisadaOtavio Ferreira MartinsNoch keine Bewertungen
- 1a Lista de ExercíciosDokument4 Seiten1a Lista de ExercíciosSandro SilvaNoch keine Bewertungen
- Problemas Sobre MITDokument59 SeitenProblemas Sobre MITraquelbu3Noch keine Bewertungen
- Laborato - Rio 1 - P2Dokument3 SeitenLaborato - Rio 1 - P2Michael ZardoNoch keine Bewertungen
- Aula ATPDrawDokument54 SeitenAula ATPDrawJoão Contreiras100% (1)
- MS - Aula Prática 02 - 2015 - 1Dokument3 SeitenMS - Aula Prática 02 - 2015 - 1João Paulo Souza DiasNoch keine Bewertungen
- Resumo Do Artigo An Advanced STATCOM Model For Optimal Power Flows Using NewtonDokument10 SeitenResumo Do Artigo An Advanced STATCOM Model For Optimal Power Flows Using NewtonJOÃO VITOR MONTES PINHEIRONoch keine Bewertungen
- EXERCÍCIOS Resol. SOBRE FUNDAMENTOS DE MÁQUINAS ELÉTRICASDokument4 SeitenEXERCÍCIOS Resol. SOBRE FUNDAMENTOS DE MÁQUINAS ELÉTRICASDanilo Ruan100% (1)
- Simulado Eletrica 01 2581Dokument12 SeitenSimulado Eletrica 01 2581Engemarinha100% (3)
- Conjugado X PotênciaDokument15 SeitenConjugado X PotênciaÁlvaro CamposNoch keine Bewertungen
- EXERCÍCIOS Gerador SíncronoDokument13 SeitenEXERCÍCIOS Gerador Síncrono3008 Bayma CA-HENoch keine Bewertungen
- Lista de Exercícios Prof. CastroDokument7 SeitenLista de Exercícios Prof. CastroLucas NascimentoNoch keine Bewertungen
- Aula (6) Controle PID de Motores CCDokument24 SeitenAula (6) Controle PID de Motores CCMatias HubertNoch keine Bewertungen
- Exercicios Cap3 PDFDokument5 SeitenExercicios Cap3 PDFVivy Tiago AssaneNoch keine Bewertungen
- Aula 20 290508Dokument26 SeitenAula 20 290508Alexandre Ungaretti100% (1)
- Apostila Sobre Controle de Motores CCDokument12 SeitenApostila Sobre Controle de Motores CCapi-370021580% (5)
- Prova4 2021-1 Reposicao MaquinasDokument6 SeitenProva4 2021-1 Reposicao MaquinasJoão PedroNoch keine Bewertungen
- Ensaio Motor CC PDFDokument35 SeitenEnsaio Motor CC PDFRogérioPaganiniValentini100% (4)
- Relatório - MOTOR CCDokument9 SeitenRelatório - MOTOR CCRafael OliveiraNoch keine Bewertungen
- Report 3Dokument2 SeitenReport 3Maxwell MenezesNoch keine Bewertungen
- Exemplos Resolvidos - Motores - CCDokument7 SeitenExemplos Resolvidos - Motores - CCArthur VictorNoch keine Bewertungen
- Relatório de Maquinas 2Dokument7 SeitenRelatório de Maquinas 2Rosana MendesNoch keine Bewertungen
- Relatório Conversores EletromecânicosDokument7 SeitenRelatório Conversores EletromecânicosMARCO THULIO ALVES MACIELNoch keine Bewertungen
- Lista 5 - Máquinas AssincronasDokument4 SeitenLista 5 - Máquinas AssincronasEvelyn DieterNoch keine Bewertungen
- ME2 SeriesincronaDokument7 SeitenME2 SeriesincronaCarlos ManuelNoch keine Bewertungen
- Exercícios - Máquinas Elétricas - Máquinas CC e InduçãoDokument12 SeitenExercícios - Máquinas Elétricas - Máquinas CC e InduçãoValencio AlvesNoch keine Bewertungen
- ControleVelocidadeMotorCC 2007Dokument47 SeitenControleVelocidadeMotorCC 2007AlyssonAlmeidaNoch keine Bewertungen
- Lista CC-CCDokument1 SeiteLista CC-CCAlan LealNoch keine Bewertungen
- Lista 4 - Máquinas SíncronasDokument5 SeitenLista 4 - Máquinas SíncronasEvelyn DieterNoch keine Bewertungen
- Aula4 Conversores CC CCDokument9 SeitenAula4 Conversores CC CCconradoalmir1Noch keine Bewertungen
- AULA PROTEÇÃO CAPITULO 7.1 Rev01Dokument65 SeitenAULA PROTEÇÃO CAPITULO 7.1 Rev01mauricio_rodrigues09Noch keine Bewertungen
- ME1 MCCS14 1a Lista Exerc GCCDokument4 SeitenME1 MCCS14 1a Lista Exerc GCCJoãoCarlosMidonNoch keine Bewertungen
- Lista STDEE UN2 v2Dokument3 SeitenLista STDEE UN2 v2Lucas ViníciusNoch keine Bewertungen
- Lista Av2 ConversaoDokument4 SeitenLista Av2 ConversaoWellington HolandaNoch keine Bewertungen
- Lista de Exercícios de Revisão - MeiiDokument4 SeitenLista de Exercícios de Revisão - MeiiSid Silas MouraNoch keine Bewertungen
- 6 Dimensionamento PDFDokument34 Seiten6 Dimensionamento PDFRodrigoChavesNoch keine Bewertungen
- Tema04 - Controle e Simulação de Conversores CC-CCDokument41 SeitenTema04 - Controle e Simulação de Conversores CC-CCJosé Adriano DieselNoch keine Bewertungen
- Ficha Tema 5Dokument2 SeitenFicha Tema 5Simao Raiva100% (1)
- Ward LeonardDokument52 SeitenWard LeonardMario Higgins67% (3)
- Anexo1-Exercícios Sobre Geradores SíncronosDokument2 SeitenAnexo1-Exercícios Sobre Geradores Síncronosj25fabiojrNoch keine Bewertungen
- Projetos Em Clp Ladder Baseado No Twidosuite Parte IVon EverandProjetos Em Clp Ladder Baseado No Twidosuite Parte INoch keine Bewertungen
- Dicas PortuguesDokument1 SeiteDicas PortuguesValdir EduardoNoch keine Bewertungen
- Novas Aulas Pra UkuleleDokument2 SeitenNovas Aulas Pra UkuleleValdir EduardoNoch keine Bewertungen
- Notas UkuleleDokument2 SeitenNotas UkuleleValdir EduardoNoch keine Bewertungen
- Notas UkuleleDokument2 SeitenNotas UkuleleValdir EduardoNoch keine Bewertungen
- Apostila de Fisica 3ano PDFDokument26 SeitenApostila de Fisica 3ano PDFcleirsNoch keine Bewertungen
- Notas UkuleleDokument2 SeitenNotas UkuleleValdir EduardoNoch keine Bewertungen
- 05-Instalação de Esgoto e Aguas Pluviais - OkDokument54 Seiten05-Instalação de Esgoto e Aguas Pluviais - OkThamaraDamascenaNoch keine Bewertungen
- Tubo de Pitot e Medição de VazãoDokument4 SeitenTubo de Pitot e Medição de VazãoValdir EduardoNoch keine Bewertungen
- Guia Matemática Prática - 2019 PDFDokument100 SeitenGuia Matemática Prática - 2019 PDFValdir EduardoNoch keine Bewertungen
- Conversão de Energia - ListaDokument14 SeitenConversão de Energia - ListaValdir EduardoNoch keine Bewertungen
- Instalações ElétricasDokument6 SeitenInstalações ElétricasValdir EduardoNoch keine Bewertungen
- Cada Um No Seu Lugar!Dokument5 SeitenCada Um No Seu Lugar!Valdir EduardoNoch keine Bewertungen
- Cabo Aluminio CADokument3 SeitenCabo Aluminio CAValdir EduardoNoch keine Bewertungen
- Super Guia ENEM - Química e Biologia-2018 PDFDokument82 SeitenSuper Guia ENEM - Química e Biologia-2018 PDFValdir EduardoNoch keine Bewertungen
- Slide Minicurso ArduinoDokument26 SeitenSlide Minicurso ArduinoValdir EduardoNoch keine Bewertungen
- 14-QUESTAO Areas CirculosDokument10 Seiten14-QUESTAO Areas CirculosValdir EduardoNoch keine Bewertungen
- 5 EdiçãoDokument10 Seiten5 EdiçãoValdir EduardoNoch keine Bewertungen
- MatemáticDokument48 SeitenMatemáticIgor VasconcelosNoch keine Bewertungen
- 5 EdiçãoDokument10 Seiten5 EdiçãoValdir EduardoNoch keine Bewertungen
- Compilacao Matematica - ResumoDokument5 SeitenCompilacao Matematica - ResumoValdir EduardoNoch keine Bewertungen
- MecanicaspDokument482 SeitenMecanicaspJoão Pedro Coutinho100% (2)
- 5 EdiçãoDokument10 Seiten5 EdiçãoValdir EduardoNoch keine Bewertungen
- UntitledDokument1 SeiteUntitledValdir EduardoNoch keine Bewertungen
- Ficha de Exercícios - 1 - Leis FundamentaisDokument7 SeitenFicha de Exercícios - 1 - Leis FundamentaisAnisio André Carlos ManhiçaNoch keine Bewertungen
- 2 - Propriedades de Uma Substância PuraDokument24 Seiten2 - Propriedades de Uma Substância PuraNathan Vergilio Da CostaNoch keine Bewertungen
- Teste 01.Dokument4 SeitenTeste 01.Célia BorgesNoch keine Bewertungen
- Lista de Exercícios 2 - Física Mecânica-Física I (2018.1) PDFDokument5 SeitenLista de Exercícios 2 - Física Mecânica-Física I (2018.1) PDFcgpm01Noch keine Bewertungen
- Massa Específica e Viscosidade PDFDokument5 SeitenMassa Específica e Viscosidade PDFFernanda GuterresNoch keine Bewertungen
- Folha de Exercicio 12 - Impulso e Colisões FISI (2021-2022)Dokument4 SeitenFolha de Exercicio 12 - Impulso e Colisões FISI (2021-2022)Diogo GonçaloNoch keine Bewertungen
- Esdras - A Segunda Lei de Newton para As RotaçõesDokument3 SeitenEsdras - A Segunda Lei de Newton para As RotaçõesESDRAS MARCIO ARAUJO LIMANoch keine Bewertungen
- Física Geral I - Lista 3 Exercícios Energia, Trabalho Conservação de Energia e PotênciaDokument3 SeitenFísica Geral I - Lista 3 Exercícios Energia, Trabalho Conservação de Energia e PotênciaRebeca AlvesNoch keine Bewertungen
- Apostila 7 - Golpe de ArieteDokument11 SeitenApostila 7 - Golpe de ArieteEnderson RamosNoch keine Bewertungen
- Eletrofisiologia Clínica Cap - 01 (2756)Dokument26 SeitenEletrofisiologia Clínica Cap - 01 (2756)FábioMacielNoch keine Bewertungen
- Lista Exe 1Dokument33 SeitenLista Exe 1vernettiNoch keine Bewertungen
- Projeto FotovoltaicoDokument1 SeiteProjeto FotovoltaicoAdam Sales50% (4)
- Lista 1º Ano Sul - Trabalho e EnergiaDokument4 SeitenLista 1º Ano Sul - Trabalho e Energia2B Giovanna Correia AraújoNoch keine Bewertungen
- MECÂNICA - DOS - FLUIDOS - Capitulo - 01 I PDFDokument38 SeitenMECÂNICA - DOS - FLUIDOS - Capitulo - 01 I PDFVildson BorbaNoch keine Bewertungen
- Fa10 PPT m15Dokument7 SeitenFa10 PPT m15Igor BatistaNoch keine Bewertungen
- Movimento Unidimensional - ApresentaçãoDokument49 SeitenMovimento Unidimensional - ApresentaçãoRamon PrankeNoch keine Bewertungen
- WEG - Transformador Trifásico - Folha de DadosDokument2 SeitenWEG - Transformador Trifásico - Folha de DadosmarceloNoch keine Bewertungen
- Centro de MassaDokument2 SeitenCentro de MassaYamba António Mfulu QINoch keine Bewertungen
- Ficha Termodinamica - Quimica - 2022 - 23Dokument2 SeitenFicha Termodinamica - Quimica - 2022 - 23Gabriel PereiraNoch keine Bewertungen
- Aula Motores CCDokument36 SeitenAula Motores CCClaudinha CristinaNoch keine Bewertungen
- G - Mecânica - Cinemática e Dinâmica Da Partícula A Duas DimensõesDokument6 SeitenG - Mecânica - Cinemática e Dinâmica Da Partícula A Duas DimensõesGuilhermeNoch keine Bewertungen
- Engenharia ElétricaDokument11 SeitenEngenharia ElétricasamugodNoch keine Bewertungen
- Exercícios Recomendados - Física IDokument11 SeitenExercícios Recomendados - Física Ianon_21106922Noch keine Bewertungen
- Aula4 Conversores CC CCDokument9 SeitenAula4 Conversores CC CCconradoalmir1Noch keine Bewertungen
- Trabalho 02 - Lei Da Indução de FaradayDokument6 SeitenTrabalho 02 - Lei Da Indução de FaradayMarielisa Pereira Alves0% (1)
- Relatorio Lab de Eletricidade Instrumentos de Medidas ElétricasDokument12 SeitenRelatorio Lab de Eletricidade Instrumentos de Medidas ElétricasdylhermandoNoch keine Bewertungen
- IPEL Aula03-RevisãoConceitosDokument15 SeitenIPEL Aula03-RevisãoConceitosScarlet V Carita QuispeNoch keine Bewertungen
- Técnicas de MedidaDokument16 SeitenTécnicas de MedidaRenato Feliciano OliveiraNoch keine Bewertungen
- Relatório - Experiência I-ProntoDokument6 SeitenRelatório - Experiência I-ProntoLivia AbreuNoch keine Bewertungen