Das könnte Ihnen auch gefallen
- Freijedo, 2009Dokument14 SeitenFreijedo, 2009EdsonNoch keine Bewertungen
- A New PMU-Based Fault Location Algorithm For Series Compensated LinesDokument14 SeitenA New PMU-Based Fault Location Algorithm For Series Compensated Linessameerpatel15770Noch keine Bewertungen
- A Generalized Delayed Signal Cancellation Method For Detecting Fundamental-Frequency Positive-Sequence Three-Phase SignalsDokument10 SeitenA Generalized Delayed Signal Cancellation Method For Detecting Fundamental-Frequency Positive-Sequence Three-Phase Signalssayali kthalkarNoch keine Bewertungen
- Análisis de Transitorios Muy Rápidos en Arrollamientos de Transformador de Tipo Capa by Popov, Van Der Sluis, Smeets, RoldanDokument10 SeitenAnálisis de Transitorios Muy Rápidos en Arrollamientos de Transformador de Tipo Capa by Popov, Van Der Sluis, Smeets, RoldanCarlos ChavezNoch keine Bewertungen
- Impedance Modeling and Analysis of Grid-Connected Voltage-Source ConvertersDokument8 SeitenImpedance Modeling and Analysis of Grid-Connected Voltage-Source ConvertersEdsonNoch keine Bewertungen
- Semlyen 9842 2834Dokument9 SeitenSemlyen 9842 2834Isai SantanaNoch keine Bewertungen
- 10 1109@tpel 2011 2159242 PDFDokument14 Seiten10 1109@tpel 2011 2159242 PDFGeorge MatosNoch keine Bewertungen
- 15-Loc - de Falta em LT Usando PMU para o Controle Do Religador-2011Dokument8 Seiten15-Loc - de Falta em LT Usando PMU para o Controle Do Religador-2011Omar Chayña VelásquezNoch keine Bewertungen
- Aalborg Universitet: Golestan, Saeed Monfared, Mohammad Guerrero, Josep MDokument9 SeitenAalborg Universitet: Golestan, Saeed Monfared, Mohammad Guerrero, Josep MhafizimtiazNoch keine Bewertungen
- Robust Detection and Analysis of Power System Oscillations Using The Teager-Kaiser Energy OperatorDokument11 SeitenRobust Detection and Analysis of Power System Oscillations Using The Teager-Kaiser Energy OperatorPramod BhattNoch keine Bewertungen
- An Empirical Table-Based FET Model: Iltcho Angelov, Niklas Rorsman, J Orgen Stenarson, Mikael Garcia, and Herbert ZirathDokument8 SeitenAn Empirical Table-Based FET Model: Iltcho Angelov, Niklas Rorsman, J Orgen Stenarson, Mikael Garcia, and Herbert ZirathAsad AliNoch keine Bewertungen
- Baowen Liu, Student Member, IEEE, Hongzhong Ma, Member, CSEE, Honghua Xu, and Ping JuDokument9 SeitenBaowen Liu, Student Member, IEEE, Hongzhong Ma, Member, CSEE, Honghua Xu, and Ping JuIsnam JukicNoch keine Bewertungen
- A Method For Synchronization of Power Electronic Converters in Polluted and Variable-Frequency EnvironmentsDokument8 SeitenA Method For Synchronization of Power Electronic Converters in Polluted and Variable-Frequency Environmentsjuancho2222Noch keine Bewertungen
- A Wavelet Power Based Algorithm For Synchronous Generator ProtectionDokument6 SeitenA Wavelet Power Based Algorithm For Synchronous Generator ProtectionsunitharajababuNoch keine Bewertungen
- A Wavelet Multiresolution Analysis For Location of Faults On Transmission LinesDokument11 SeitenA Wavelet Multiresolution Analysis For Location of Faults On Transmission LinesengshimaaNoch keine Bewertungen
- A Review On Synchronization Methods For Grid-Connected Three-Phase VSC Under Unbalanced and Distorted ConditionsDokument10 SeitenA Review On Synchronization Methods For Grid-Connected Three-Phase VSC Under Unbalanced and Distorted ConditionsnmotanNoch keine Bewertungen
- A Platform For For Valodation of FACTS ModelsDokument8 SeitenA Platform For For Valodation of FACTS ModelsJorge ZuluagaNoch keine Bewertungen
- Performance Evaluation of A Distance Relay As Applied To A Transmission System With UPFCDokument11 SeitenPerformance Evaluation of A Distance Relay As Applied To A Transmission System With UPFCanjas dwiNoch keine Bewertungen
- Detection and Localization of Internal Turn-To-Turn Short Circuits in Transformer Windings by Means of Negative Sequence AnalysisDokument7 SeitenDetection and Localization of Internal Turn-To-Turn Short Circuits in Transformer Windings by Means of Negative Sequence AnalysisHugo RodriguezNoch keine Bewertungen
- Rough-Granular Approach For Impulse Fault Classification of Transformers Using Cross-Wavelet TransformDokument8 SeitenRough-Granular Approach For Impulse Fault Classification of Transformers Using Cross-Wavelet TransformDebojyoti MukherjeeNoch keine Bewertungen
- Currents Sequence Analysis of a Transformer Under Turn-to-Turn FaultsDokument6 SeitenCurrents Sequence Analysis of a Transformer Under Turn-to-Turn Faultssehili ammarNoch keine Bewertungen
- An Adaptive Filters Based PMU Algorithm For Both Steady-State and Dynamic Conditions in Distribution NetworksDokument13 SeitenAn Adaptive Filters Based PMU Algorithm For Both Steady-State and Dynamic Conditions in Distribution NetworkstiagoNoch keine Bewertungen
- Kumar-Jena2017 Article SolutionToFaultDetectionDuringDokument11 SeitenKumar-Jena2017 Article SolutionToFaultDetectionDuringBrooke ClineNoch keine Bewertungen
- Limongi 2007Dokument8 SeitenLimongi 2007NaqNoch keine Bewertungen
- A Low Voltage All Digital On Chip Oscillator Using Relative Reference ModelingDokument6 SeitenA Low Voltage All Digital On Chip Oscillator Using Relative Reference ModelingShruti KalraNoch keine Bewertungen
- Modeling of FACTS Devices Based On SPWM VSCsDokument9 SeitenModeling of FACTS Devices Based On SPWM VSCsshehnozmohdNoch keine Bewertungen
- Multiobjective Optimal Reconfiguration of MV Networks With Different Earthing SystemsDokument6 SeitenMultiobjective Optimal Reconfiguration of MV Networks With Different Earthing Systemssreddy4svuNoch keine Bewertungen
- Detection of Inter-Turn Faults in Transformers Using Continuous Wavelet Transform and Convolutional Neural NetworkDokument4 SeitenDetection of Inter-Turn Faults in Transformers Using Continuous Wavelet Transform and Convolutional Neural NetworkoheneNoch keine Bewertungen
- ModelingDokument9 SeitenModelingGilberto MejiaNoch keine Bewertungen
- A New Method For Arcing Fault Location Using Discrete Wavelet Transform and Wavelet NetworksDokument1 SeiteA New Method For Arcing Fault Location Using Discrete Wavelet Transform and Wavelet NetworksListrik KehidupanNoch keine Bewertungen
- A Novel Three-Phase Software Phase-Locked Loop Based On Frequency-Locked Loop and Initial Phase Angle Detection Phase-Locked LoopDokument6 SeitenA Novel Three-Phase Software Phase-Locked Loop Based On Frequency-Locked Loop and Initial Phase Angle Detection Phase-Locked LoopjunyeolNoch keine Bewertungen
- Spline and Spline Wavelet Methods with Applications to Signal and Image Processing: Volume III: Selected TopicsVon EverandSpline and Spline Wavelet Methods with Applications to Signal and Image Processing: Volume III: Selected TopicsNoch keine Bewertungen
- 3.single-Phase-To-Ground Fault Detection With Distributed Parameters Analysis in Non-DirecDokument9 Seiten3.single-Phase-To-Ground Fault Detection With Distributed Parameters Analysis in Non-DirecVEDER MIGUEL TORRES BENITESNoch keine Bewertungen
- A Novel Phase-Locked Loop Based On Frequency Detector and Initial Phase Angle DetectorDokument12 SeitenA Novel Phase-Locked Loop Based On Frequency Detector and Initial Phase Angle DetectorjunyeolNoch keine Bewertungen
- An Efficient Method For Determining Threshold Voltage, Series Resistance and Effective Geometry MOS TransistorsDokument8 SeitenAn Efficient Method For Determining Threshold Voltage, Series Resistance and Effective Geometry MOS Transistorskurts010Noch keine Bewertungen
- Adaptive Protection of Parallel Transmission Lines Using Combined Cross-Differential and Impedance-Based Techniques PDFDokument12 SeitenAdaptive Protection of Parallel Transmission Lines Using Combined Cross-Differential and Impedance-Based Techniques PDFRayNoch keine Bewertungen
- High-Frequency Modeling of Power Transformers For Use in Frequency Response Analysis (FRA)Dokument8 SeitenHigh-Frequency Modeling of Power Transformers For Use in Frequency Response Analysis (FRA)alireza shaNoch keine Bewertungen
- Indonesian Journal of Science & Technology 7 (1) (2022) 19-36Dokument18 SeitenIndonesian Journal of Science & Technology 7 (1) (2022) 19-36Masudur RahmanNoch keine Bewertungen
- Broadband Methods For Online Grid Impedance MeasurementDokument8 SeitenBroadband Methods For Online Grid Impedance MeasurementSukant BhattacharyaNoch keine Bewertungen
- IJCAS v4 n3 pp.365-371Dokument7 SeitenIJCAS v4 n3 pp.365-371PrasadNoch keine Bewertungen
- Comparison of DSOGI-Based PLL For Phase Estimation in Three-Phase Weak GridsDokument27 SeitenComparison of DSOGI-Based PLL For Phase Estimation in Three-Phase Weak GridsJAHANGEER AHMADNoch keine Bewertungen
- Analysis of Very Fast Transients in Layer-Type Transformer WindingsDokument10 SeitenAnalysis of Very Fast Transients in Layer-Type Transformer WindingsZaid Luna LopezNoch keine Bewertungen
- Electrification December 2023 Open ArticleDokument9 SeitenElectrification December 2023 Open Articlesandy_2004Noch keine Bewertungen
- State-space model of grid-connected inverters under current controlDokument10 SeitenState-space model of grid-connected inverters under current controloussama sadkiNoch keine Bewertungen
- Step by Step Ieee AWESOMEDokument6 SeitenStep by Step Ieee AWESOMESimon Pedro Aguilar RiosNoch keine Bewertungen
- Jetcas 2017 2705684Dokument10 SeitenJetcas 2017 2705684Ashley SureshNoch keine Bewertungen
- CORPOELECDokument33 SeitenCORPOELECjoelNoch keine Bewertungen
- 1 s2.0 S0038092X11002921 MainDokument10 Seiten1 s2.0 S0038092X11002921 MainAbderrezak BadjiNoch keine Bewertungen
- Power Measurements Under Nonsinusoidal Conditions : A Thesis in Electrical EngineeringVon EverandPower Measurements Under Nonsinusoidal Conditions : A Thesis in Electrical EngineeringNoch keine Bewertungen
- 06147083Dokument6 Seiten06147083Felix GamarraNoch keine Bewertungen
- 1 s2.0 S0142061518305763 MainDokument11 Seiten1 s2.0 S0142061518305763 MainAnamika YadavNoch keine Bewertungen
- A Comparative Performance Evaluation of Extended AANF With Different Parameter Estimation Techniques For Renewable Energy IntegrationDokument12 SeitenA Comparative Performance Evaluation of Extended AANF With Different Parameter Estimation Techniques For Renewable Energy IntegrationVishal BhardwajNoch keine Bewertungen
- Investigation of Very Fast Transient Overvoltage Distribution in Taper Winding of Tesla TransformerDokument8 SeitenInvestigation of Very Fast Transient Overvoltage Distribution in Taper Winding of Tesla TransformeraocalayNoch keine Bewertungen
- Detection and Classification of Faults On Transmission Line Using Wavelet Transform and Neural NetworkDokument6 SeitenDetection and Classification of Faults On Transmission Line Using Wavelet Transform and Neural NetworkMohit Kumar ChowdaryNoch keine Bewertungen
- J4 Distortion Correction CircuitsDokument8 SeitenJ4 Distortion Correction CircuitsАлексей ГрабкоNoch keine Bewertungen
- Frequency Tracking in Power Networks in The Presence of HarmonicsDokument7 SeitenFrequency Tracking in Power Networks in The Presence of HarmonicsFabien CallodNoch keine Bewertungen
- Change of Energy in Current SignalDokument6 SeitenChange of Energy in Current SignalAshley SureshNoch keine Bewertungen
- Best Document EverDokument9 SeitenBest Document EvergetshNoch keine Bewertungen
- Author 'S Accepted ManuscriptDokument36 SeitenAuthor 'S Accepted ManuscriptPardha Saradhi JNoch keine Bewertungen
- Automated Broad and Narrow Band Impedance Matching for RF and Microwave CircuitsVon EverandAutomated Broad and Narrow Band Impedance Matching for RF and Microwave CircuitsNoch keine Bewertungen
- 1.1 Basic Laws of Magnetic TheoryDokument29 Seiten1.1 Basic Laws of Magnetic TheoryEdsonNoch keine Bewertungen
- CircuiTikZ 0.8.3 - Massimo Redaelli & Stefan Lindner & Stefan ErhardtDokument68 SeitenCircuiTikZ 0.8.3 - Massimo Redaelli & Stefan Lindner & Stefan ErhardtJacobo SimonidesNoch keine Bewertungen
- Reverse Engineering For Beginners by Dennis Yurichev - August 2016Dokument987 SeitenReverse Engineering For Beginners by Dennis Yurichev - August 2016ntcaseNoch keine Bewertungen
- CheapStat An Open-Source, "Do-It-Yourself" Potentiostat For Analytical and Educational ApplicationsDokument7 SeitenCheapStat An Open-Source, "Do-It-Yourself" Potentiostat For Analytical and Educational ApplicationsJoão CostaNoch keine Bewertungen
- Analog Design PDFDokument101 SeitenAnalog Design PDFGabriela ValentinaNoch keine Bewertungen
- Applications and Restrictions CMOS PDFDokument15 SeitenApplications and Restrictions CMOS PDFPhan Giang ChâuNoch keine Bewertungen
- Clay, 1979Dokument5 SeitenClay, 1979EdsonNoch keine Bewertungen
- Active Filter NotesDokument19 SeitenActive Filter NotesSrinivasu RajuNoch keine Bewertungen
- High Voltage Differential Probe: Main CharacteristicsDokument6 SeitenHigh Voltage Differential Probe: Main CharacteristicsEdsonNoch keine Bewertungen
- Aluminum electrolytic capacitors data sheet overviewDokument8 SeitenAluminum electrolytic capacitors data sheet overviewEdson100% (1)
- FAQ - GigatronDokument24 SeitenFAQ - GigatronEdsonNoch keine Bewertungen
- Circuit To Increase Input Range-Sbaa244Dokument6 SeitenCircuit To Increase Input Range-Sbaa244EdsonNoch keine Bewertungen
- Nneme, 2014Dokument5 SeitenNneme, 2014EdsonNoch keine Bewertungen
- Programming The GigatronDokument5 SeitenProgramming The GigatronEdsonNoch keine Bewertungen
- Buso1 PDFDokument74 SeitenBuso1 PDFHenkNoch keine Bewertungen
- An 944Dokument5 SeitenAn 944John CareyNoch keine Bewertungen
- Cosmic Ray Failures in Power Electronics: Application NoteDokument12 SeitenCosmic Ray Failures in Power Electronics: Application NoteEdsonNoch keine Bewertungen
- Gate Drive Hexfet Power MosfetsDokument22 SeitenGate Drive Hexfet Power MosfetsNacer MezghicheNoch keine Bewertungen
- Application Note: Connection Between Gate Driver and ControllerDokument4 SeitenApplication Note: Connection Between Gate Driver and ControllerEdsonNoch keine Bewertungen
- Application Note: Connection Between Gate Driver and ControllerDokument4 SeitenApplication Note: Connection Between Gate Driver and ControllerEdsonNoch keine Bewertungen
- SEMIKRON Application-Note High Voltage Testing EN 2016-08-22 Rev-00 PDFDokument11 SeitenSEMIKRON Application-Note High Voltage Testing EN 2016-08-22 Rev-00 PDFBhavik PrajapatiNoch keine Bewertungen
- Antialiasing Filter Circuit Design-Sbaa282Dokument10 SeitenAntialiasing Filter Circuit Design-Sbaa282EdsonNoch keine Bewertungen
- 1A An-7003 Gate Resistor-Principles and Applications Rev00Dokument10 Seiten1A An-7003 Gate Resistor-Principles and Applications Rev00Barbara EllisNoch keine Bewertungen
- Grugel, 2016Dokument4 SeitenGrugel, 2016EdsonNoch keine Bewertungen
- About Strange Effects Related To Rotating Magnetic-Faraday - (2019) PDFDokument95 SeitenAbout Strange Effects Related To Rotating Magnetic-Faraday - (2019) PDFEdsonNoch keine Bewertungen
- Brief Summary of Topological Geometrodynamics (TGDDokument3 SeitenBrief Summary of Topological Geometrodynamics (TGDEdsonNoch keine Bewertungen
- About Strange Effects Related To Rotating Magnetic-Faraday - (2019) PDFDokument95 SeitenAbout Strange Effects Related To Rotating Magnetic-Faraday - (2019) PDFEdsonNoch keine Bewertungen
- Brief Summary of Topological Geometrodynamics (TGDDokument3 SeitenBrief Summary of Topological Geometrodynamics (TGDEdsonNoch keine Bewertungen
- About Strange Effects Related To Rotating Magnetic-Faraday - (2019) PDFDokument95 SeitenAbout Strange Effects Related To Rotating Magnetic-Faraday - (2019) PDFEdsonNoch keine Bewertungen
- Svindrych, 2012Dokument5 SeitenSvindrych, 2012EdsonNoch keine Bewertungen
- Core-Iii-558-32511303-Digital Electronics and VHDL-21-12-2020Dokument4 SeitenCore-Iii-558-32511303-Digital Electronics and VHDL-21-12-2020Sachin KumarNoch keine Bewertungen
- Hikvision Smart Functions and Applications: Hikvision Certified Security AssociateDokument48 SeitenHikvision Smart Functions and Applications: Hikvision Certified Security AssociateMiri HasanovNoch keine Bewertungen
- Edwin Gray Electronic Circuit PDFDokument6 SeitenEdwin Gray Electronic Circuit PDFAvram StefanNoch keine Bewertungen
- Excel Chapter - 16Dokument5 SeitenExcel Chapter - 16Shahwaiz Bin Imran BajwaNoch keine Bewertungen
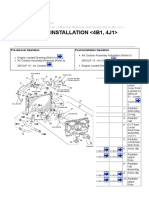
- SEKSYEN RADIATOR 4B11 Mitsubishi Motors Service ManualDokument5 SeitenSEKSYEN RADIATOR 4B11 Mitsubishi Motors Service ManualAz Zahra AzmanNoch keine Bewertungen
- Evidencia InglesDokument4 SeitenEvidencia InglesRonald GonzalezNoch keine Bewertungen
- SBNHH-1D45C Product SpecificationsDokument4 SeitenSBNHH-1D45C Product SpecificationsMauricioNoch keine Bewertungen
- Best Civil Engineering Software Updated List 2021Dokument5 SeitenBest Civil Engineering Software Updated List 2021voyferNoch keine Bewertungen
- Heating Ventilation and Air ConditioningDokument14 SeitenHeating Ventilation and Air ConditioningMiahsaheb Rafeeq100% (1)
- The Meaning of An Algorithm:: CCP Lab Manual, 10CPL16/26Dokument78 SeitenThe Meaning of An Algorithm:: CCP Lab Manual, 10CPL16/26Manjunath Yadav100% (3)
- Professional Summary: Sap FicaDokument3 SeitenProfessional Summary: Sap FicaAkhilesh AgnihotriNoch keine Bewertungen
- Mathematics Syllabus PDFDokument5 SeitenMathematics Syllabus PDFLETCHUMY A/P MARIPAN MoeNoch keine Bewertungen
- MAXIS Annual Report 2010 (2.8MB)Dokument283 SeitenMAXIS Annual Report 2010 (2.8MB)Tee Chee KeongNoch keine Bewertungen
- How To Upload A Video To YoukuDokument13 SeitenHow To Upload A Video To Youkushu2uNoch keine Bewertungen
- Network Interface Audit LogDokument31 SeitenNetwork Interface Audit LogVictor CuencaNoch keine Bewertungen
- Gabon (Order No. 15-PR-2018 On The Regulation of Cybersecurity and The Fight Against Cybercrime)Dokument2 SeitenGabon (Order No. 15-PR-2018 On The Regulation of Cybersecurity and The Fight Against Cybercrime)Katrice ObreroNoch keine Bewertungen
- 64148069036e353d2c4d1930 - Weekly Timesheet Template - My HoursDokument9 Seiten64148069036e353d2c4d1930 - Weekly Timesheet Template - My Hoursoces1551Noch keine Bewertungen
- Fasteners For Use With PC Boards: Types Kfe and Kfse Broaching StandoffsDokument4 SeitenFasteners For Use With PC Boards: Types Kfe and Kfse Broaching StandoffsJosé Ignacio CandelaNoch keine Bewertungen
- New Concept Note SEA Creative Camp For SE As (Update 240919)Dokument11 SeitenNew Concept Note SEA Creative Camp For SE As (Update 240919)Winda Putri Dea lestariNoch keine Bewertungen
- Linux Windows Privilege Escalation Cheat Sheet 1661340779Dokument25 SeitenLinux Windows Privilege Escalation Cheat Sheet 1661340779Jose ChavezNoch keine Bewertungen
- Micro Analysis Report PDFDokument1 SeiteMicro Analysis Report PDFChalil FachroniNoch keine Bewertungen
- Track Record Harga SahamDokument8 SeitenTrack Record Harga SahamMuhammad FakhrizalNoch keine Bewertungen
- Implementing An Industrial Cybersecurity ProgramDokument11 SeitenImplementing An Industrial Cybersecurity ProgramM. J. A. EmpreendimentosNoch keine Bewertungen
- Dumitrașcu, Nicolae-Adrian Dincă, Alexandru Predincea, Nicolae. Virtual Commissioning of A Robotic Cell Using Tecnomatix Process SimulateDokument16 SeitenDumitrașcu, Nicolae-Adrian Dincă, Alexandru Predincea, Nicolae. Virtual Commissioning of A Robotic Cell Using Tecnomatix Process SimulateStephanie RiccoNoch keine Bewertungen
- Chapter 2Dokument44 SeitenChapter 2Bikila SeketaNoch keine Bewertungen
- Scraper SiteDokument3 SeitenScraper Sitelinda976Noch keine Bewertungen
- 2M H.265 Network 32x Zoom Camera: Key FeaturesDokument2 Seiten2M H.265 Network 32x Zoom Camera: Key Featuresnot jappeningNoch keine Bewertungen
- Frequency Drive - ZapMetaDokument4 SeitenFrequency Drive - ZapMetaJemerald MagtanongNoch keine Bewertungen
- Lab - Researching Network Attacks and Security Audit ToolsDokument4 SeitenLab - Researching Network Attacks and Security Audit ToolsAlvaro Avila QuirosNoch keine Bewertungen
- Advanced Grammar & Composition: Dgrigar@twu - EduDokument7 SeitenAdvanced Grammar & Composition: Dgrigar@twu - EduSarahNoch keine Bewertungen