Das könnte Ihnen auch gefallen
- Productivity Now: Social Administration, Training, Economics and Production DivisionVon EverandProductivity Now: Social Administration, Training, Economics and Production DivisionNoch keine Bewertungen
- Answers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesVon EverandAnswers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesBewertung: 1.5 von 5 Sternen1.5/5 (2)
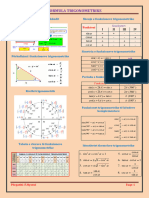
- FSC Trignometric Formulas Muzzammil SubhanDokument1 SeiteFSC Trignometric Formulas Muzzammil SubhanAsif Hussain ShigriNoch keine Bewertungen
- Trigo FormulaeDokument2 SeitenTrigo Formulaejayesh100% (1)
- Notes For HKCEE Mathematics Trigonometry: DefinitionDokument7 SeitenNotes For HKCEE Mathematics Trigonometry: DefinitionNetsnom GnehcNoch keine Bewertungen
- MSLC Trigonometry HandoutDokument4 SeitenMSLC Trigonometry HandoutAnderson AlfredNoch keine Bewertungen
- Trigonometry Formula GuideDokument3 SeitenTrigonometry Formula GuidePrabakaran Shiva0% (1)
- Trig. Formulae (XII-XI)Dokument4 SeitenTrig. Formulae (XII-XI)AzeemNoch keine Bewertungen
- Reference Trigonometry IdentitiesDokument2 SeitenReference Trigonometry IdentitiesPETERNoch keine Bewertungen
- Synopsis On Elementary Mathematics and Calculus - XI (2020)Dokument10 SeitenSynopsis On Elementary Mathematics and Calculus - XI (2020)Manoj NemaNoch keine Bewertungen
- Formulae Trigonometry 1Dokument2 SeitenFormulae Trigonometry 1Aadi SachdevaNoch keine Bewertungen
- Formulae TrigonometryDokument3 SeitenFormulae TrigonometrySuyash ChauhanNoch keine Bewertungen
- Mathongo - Formula Sheet - Trig. Ratios & Equations: B A B A B A B A B A B A B A B A B A B A B A B A B A B ADokument4 SeitenMathongo - Formula Sheet - Trig. Ratios & Equations: B A B A B A B A B A B A B A B A B A B A B A B A B A B ADhananjay S MathekarNoch keine Bewertungen
- Diffraction Notes AktuDokument9 SeitenDiffraction Notes AktuMayank RajNoch keine Bewertungen
- Half-Angle identities: rπθ ° cscθDokument2 SeitenHalf-Angle identities: rπθ ° cscθkxungsooNoch keine Bewertungen
- Summary of Trigonometric IdentitiesDokument105 SeitenSummary of Trigonometric IdentitiessaTITHEcoolbusterNoch keine Bewertungen
- (Maa 3.5) Sin, Cos, Tan On The Unit Circle - Identities - SolutionsDokument6 Seiten(Maa 3.5) Sin, Cos, Tan On The Unit Circle - Identities - Solutionsrogchen666Noch keine Bewertungen
- Self-Study Review (Chapter B) : Z X Jy (Cartesian Form)Dokument3 SeitenSelf-Study Review (Chapter B) : Z X Jy (Cartesian Form)ashaw002Noch keine Bewertungen
- 11 Memorise TheseDokument11 Seiten11 Memorise Theseyuiwang0709Noch keine Bewertungen
- Formula TrigonometrikeDokument2 SeitenFormula TrigonometrikekraonarNoch keine Bewertungen
- TRIGONOMETRYDokument28 SeitenTRIGONOMETRYJesus Iii ObutNoch keine Bewertungen
- Quotient Identities: Sin Tan Cos Cos Cot SinDokument55 SeitenQuotient Identities: Sin Tan Cos Cos Cot SinYoga SutresnaNoch keine Bewertungen
- TRIGOOOOOOOOOOOOOrdDokument3 SeitenTRIGOOOOOOOOOOOOOrdMaria Luira Elisa BercesNoch keine Bewertungen
- VCE Unit 2 Specialist Maths Bound ReferenceDokument17 SeitenVCE Unit 2 Specialist Maths Bound ReferenceMikiNoch keine Bewertungen
- Trig Identities Matching ActivityDokument6 SeitenTrig Identities Matching ActivityMade Sudarmawa Made SudarmawaNoch keine Bewertungen
- Eew ps4Dokument6 SeitenEew ps4stfirstfir stlastlaNoch keine Bewertungen
- Class X - Maths Solutions 18-09-22Dokument1 SeiteClass X - Maths Solutions 18-09-22Sai Viswanath BommakantiNoch keine Bewertungen
- Catatan Matematika - TrigonometriDokument1 SeiteCatatan Matematika - Trigonometri33 SHARA FEBRIANA ANGGRAINI100% (1)
- Formula RioDokument2 SeitenFormula Riodaniel ornelasNoch keine Bewertungen
- AlgebraDokument35 SeitenAlgebraShauryaNoch keine Bewertungen
- 2010 Amkss My 4e5na Am P1Dokument5 Seiten2010 Amkss My 4e5na Am P1Timothy HandokoNoch keine Bewertungen
- SAT II Math FormulaDokument10 SeitenSAT II Math FormulasairamNoch keine Bewertungen
- MF19Dokument13 SeitenMF19weijie kongNoch keine Bewertungen
- 5.trigonometry at A Glance 1Dokument1 Seite5.trigonometry at A Glance 1vamshiNoch keine Bewertungen
- Trigonometric Formulas R3Dokument3 SeitenTrigonometric Formulas R3weird factsNoch keine Bewertungen
- Test 1: Name: ClassDokument2 SeitenTest 1: Name: ClassjohnjabarajNoch keine Bewertungen
- Anexo 1Dokument7 SeitenAnexo 1Saydyth DyannNoch keine Bewertungen
- Trigonometry Review: C A S TDokument2 SeitenTrigonometry Review: C A S TStephanieNoch keine Bewertungen
- 2.2 - Trigonometric Functions: SectionDokument27 Seiten2.2 - Trigonometric Functions: SectionMario Alberto Nuño CarrascoNoch keine Bewertungen
- Trigonometry Formulae - Trigo Formulae For LAKSHYA JEEDokument2 SeitenTrigonometry Formulae - Trigo Formulae For LAKSHYA JEEprekshaNoch keine Bewertungen
- M2V1 Ch03 FS 01e EOpNIGJbDokument47 SeitenM2V1 Ch03 FS 01e EOpNIGJbAnthony ChanNoch keine Bewertungen
- Tampines Prelim 2009 Am 1Dokument6 SeitenTampines Prelim 2009 Am 1JASON_INGHAMNoch keine Bewertungen
- JEE Main 2023 Revision Notes On Trigonometry - Free PDF DownloadDokument6 SeitenJEE Main 2023 Revision Notes On Trigonometry - Free PDF Downloadlogin3868Noch keine Bewertungen
- Chapter 3.3 - Formula - Laplace TransformDokument3 SeitenChapter 3.3 - Formula - Laplace TransformEncik MaaNoch keine Bewertungen
- Properties of TrianglesDokument5 SeitenProperties of TrianglesUppu EshwarNoch keine Bewertungen
- Trig IdentitiesDokument1 SeiteTrig IdentitiesHajauni ParsonsNoch keine Bewertungen
- Ch09-Sinusoids and PhasorsDokument40 SeitenCh09-Sinusoids and Phasorsavishek aviNoch keine Bewertungen
- 4E A Maths P1 Prelim 1 2009 (Final)Dokument4 Seiten4E A Maths P1 Prelim 1 2009 (Final)runwaymemoriesNoch keine Bewertungen
- Trig Facts To MemorizeDokument1 SeiteTrig Facts To MemorizesanthiNoch keine Bewertungen
- Fundamental Trig IdentitiesDokument2 SeitenFundamental Trig IdentitiesdrooolNoch keine Bewertungen
- Read These Instructions First: NAME: - CLASSDokument6 SeitenRead These Instructions First: NAME: - CLASSJASON_INGHAMNoch keine Bewertungen
- Geometry Theory Consolidated For MBA PrepDokument12 SeitenGeometry Theory Consolidated For MBA Prepa_j_sanyalNoch keine Bewertungen
- Centum I.T.FDokument2 SeitenCentum I.T.Fnethan171106Noch keine Bewertungen
- FSC Area Triangle FormulasDokument1 SeiteFSC Area Triangle FormulasOmer Muneer QaziNoch keine Bewertungen
- 2009 Prelim ESpring S4E AM P2Dokument15 Seiten2009 Prelim ESpring S4E AM P2ZeneonNoch keine Bewertungen
- Trigonometric FormulaeDokument6 SeitenTrigonometric FormulaeholaNoch keine Bewertungen
- Formulae and DefinitionsDokument58 SeitenFormulae and DefinitionsShrikrishna BirajdarNoch keine Bewertungen
- Physics: C XX ADokument58 SeitenPhysics: C XX AIshitaKothariNoch keine Bewertungen
- Pure Math - Formulae: TrigonometryDokument3 SeitenPure Math - Formulae: Trigonometryjared liNoch keine Bewertungen
- Module 02 - Plane and Spherical Trigonometry PDFDokument3 SeitenModule 02 - Plane and Spherical Trigonometry PDFNiwled UyNoch keine Bewertungen
- Sundholm 1998Dokument17 SeitenSundholm 1998sameer khanNoch keine Bewertungen
- Reservoir Sedimentation: Slide #1Dokument15 SeitenReservoir Sedimentation: Slide #1sameer khanNoch keine Bewertungen
- Forces Acting On DamsDokument12 SeitenForces Acting On Damssameer khanNoch keine Bewertungen
- 206-Sheet - S 100 C - Excavation Layout-Layout1Dokument1 Seite206-Sheet - S 100 C - Excavation Layout-Layout1sameer khanNoch keine Bewertungen
- 125 Keep Public Non-Existing Misleading Designation. ReplyingDokument9 Seiten125 Keep Public Non-Existing Misleading Designation. Replyingsameer khanNoch keine Bewertungen
- Lecture 13 & 14 Metals, Alloys, Types of Iron and Mechanical PropertiesDokument20 SeitenLecture 13 & 14 Metals, Alloys, Types of Iron and Mechanical Propertiessameer khanNoch keine Bewertungen
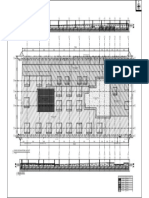
- Owner: Sajid Naeem Arch-01: 1/8" 1'-0" 1 Ground FloorDokument1 SeiteOwner: Sajid Naeem Arch-01: 1/8" 1'-0" 1 Ground Floorsameer khanNoch keine Bewertungen
- New Doc 2020-10-08 12.53.45Dokument5 SeitenNew Doc 2020-10-08 12.53.45sameer khanNoch keine Bewertungen
- Civil Engineering Materials Lecture 15 & 16 Steel, Alloy Steel Composition and ClassificationDokument21 SeitenCivil Engineering Materials Lecture 15 & 16 Steel, Alloy Steel Composition and Classificationsameer khanNoch keine Bewertungen
- 10 Marla House Plan Owner Arh 01: 1/8" 1'-0" 1 Ground FloorDokument1 Seite10 Marla House Plan Owner Arh 01: 1/8" 1'-0" 1 Ground Floorsameer khanNoch keine Bewertungen
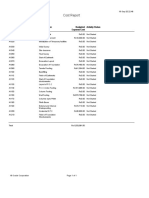
- Cost Expense ReportDokument1 SeiteCost Expense Reportsameer khanNoch keine Bewertungen
- 5 Marla House 5 Marla House 5 Marla House: Preliminary Works Preliminary Works Preliminary WorksDokument22 Seiten5 Marla House 5 Marla House 5 Marla House: Preliminary Works Preliminary Works Preliminary Workssameer khanNoch keine Bewertungen
- Activities Report: Activity ID Activity Name Activity Status Original Duration Early Start Early Finish Longest PathDokument2 SeitenActivities Report: Activity ID Activity Name Activity Status Original Duration Early Start Early Finish Longest Pathsameer khanNoch keine Bewertungen
- New Doc 2020-08-21 17.35.23Dokument12 SeitenNew Doc 2020-08-21 17.35.23sameer khanNoch keine Bewertungen
- Fa16 CVE 052Dokument4 SeitenFa16 CVE 052sameer khanNoch keine Bewertungen
- Highway Drainage Part-2Dokument13 SeitenHighway Drainage Part-2sameer khanNoch keine Bewertungen
- Tuition CentreDokument1 SeiteTuition Centresameer khanNoch keine Bewertungen
- Assignment #02 Irrigation Engineering2020Dokument2 SeitenAssignment #02 Irrigation Engineering2020sameer khan100% (1)
- Title Page APA Style and Parts of AbstractDokument3 SeitenTitle Page APA Style and Parts of Abstractsameer khanNoch keine Bewertungen
- Title PageDokument1 SeiteTitle Pagesameer khanNoch keine Bewertungen
- Aashto Design Method: (Merican Ssociation of Tate Ighway and Ransportation Fficials)Dokument46 SeitenAashto Design Method: (Merican Ssociation of Tate Ighway and Ransportation Fficials)sameer khanNoch keine Bewertungen
- Total 45000 Column1 Column2 Column3 Column4 Column5 Abbu Sameer Adeel Awais&inshal Fruit/veg 900 40 130 80 300 1000 150 1000 150Dokument3 SeitenTotal 45000 Column1 Column2 Column3 Column4 Column5 Abbu Sameer Adeel Awais&inshal Fruit/veg 900 40 130 80 300 1000 150 1000 150sameer khanNoch keine Bewertungen
- Lectures 4-5 Chapter 4 Fall 2009Dokument27 SeitenLectures 4-5 Chapter 4 Fall 2009tewari_skNoch keine Bewertungen
- 1 Sukatan Membulat Kelas14feb 2020Dokument34 Seiten1 Sukatan Membulat Kelas14feb 2020Norhapidah Mohd SaadNoch keine Bewertungen
- Class XI Subject Mathematics Topic Mensuration Sub Topic (01) Volumes and Surface Areas No. of Sessions ThreeDokument7 SeitenClass XI Subject Mathematics Topic Mensuration Sub Topic (01) Volumes and Surface Areas No. of Sessions ThreeSwayam AgarwalNoch keine Bewertungen
- STD 11 Maths Paper 1 Maharashtra BoardDokument24 SeitenSTD 11 Maths Paper 1 Maharashtra BoardKhushil100% (1)
- Kelantan MM k2 2018 EdittedDokument13 SeitenKelantan MM k2 2018 Edittedadugawatezu_91044251Noch keine Bewertungen
- 2-The Angle Addition PostulateDokument4 Seiten2-The Angle Addition Postulateapi-267829768Noch keine Bewertungen
- A Trices: 43 d21 Otder - Ik 24Dokument25 SeitenA Trices: 43 d21 Otder - Ik 24Rahul DesaiNoch keine Bewertungen
- Chapter 8: Circular MeasureDokument9 SeitenChapter 8: Circular MeasureHayati Aini AhmadNoch keine Bewertungen
- Math 7 Q3 Week-2 Las-3Dokument2 SeitenMath 7 Q3 Week-2 Las-3Glydel Mae Villamora - Saragena100% (1)
- Palmer C, Leigh C - Plane and Spherical TrigonometryDokument196 SeitenPalmer C, Leigh C - Plane and Spherical Trigonometryfafarifafu100% (1)
- Circle-Theorems TestDokument12 SeitenCircle-Theorems TestsaipkNoch keine Bewertungen
- LINES AND ANGLES Class 9 CBSEDokument8 SeitenLINES AND ANGLES Class 9 CBSEriya rajputNoch keine Bewertungen
- XVOch Ey WZC 0 F 2 TJ 8 BxcsDokument12 SeitenXVOch Ey WZC 0 F 2 TJ 8 Bxcsz5476259Noch keine Bewertungen
- Math 9 Quarter 4Dokument12 SeitenMath 9 Quarter 4Maria Sadaran100% (1)
- TOPIC - Lines and Angles: Name - Sec - Date - Roll No.Dokument4 SeitenTOPIC - Lines and Angles: Name - Sec - Date - Roll No.Lucky2503100% (1)
- Mensuration Part - IDokument9 SeitenMensuration Part - IDebjani MondalNoch keine Bewertungen
- Answers To Even-Numbered Conceptual QuestionsDokument6 SeitenAnswers To Even-Numbered Conceptual QuestionslazarNoch keine Bewertungen
- UNIT 14 Volumes CSEC Revision TestDokument3 SeitenUNIT 14 Volumes CSEC Revision Testgabby fosterNoch keine Bewertungen
- Phy 1Dokument50 SeitenPhy 1Garlapati Srinivasa Rao100% (1)
- Attack Disc Handbook PDFDokument36 SeitenAttack Disc Handbook PDFtordo22Noch keine Bewertungen
- Trigonometric Equations & Identities: Created by T. MadasDokument40 SeitenTrigonometric Equations & Identities: Created by T. MadasHui Ni YamNoch keine Bewertungen
- Unit 7: Trigonometric Functions: Graphing The Trigonometric FunctionDokument55 SeitenUnit 7: Trigonometric Functions: Graphing The Trigonometric FunctionNoli NogaNoch keine Bewertungen
- General Physics1: Quarter 1 - Module 4: Title: Kinematics: Motion in 2-3 DimensionsDokument23 SeitenGeneral Physics1: Quarter 1 - Module 4: Title: Kinematics: Motion in 2-3 DimensionsDiana Silva Hernandez0% (1)
- Trigonometry SlidesDokument115 SeitenTrigonometry Slideschristian pagtamaNoch keine Bewertungen
- MFE Introduction To TrigonemtryDokument4 SeitenMFE Introduction To TrigonemtryJohn RheneNoch keine Bewertungen
- B18 Statics - Resultants - ProblemsDokument33 SeitenB18 Statics - Resultants - ProblemsAj MendezNoch keine Bewertungen
- Dynamics HW1Dokument10 SeitenDynamics HW1sugar_87Noch keine Bewertungen
- Lesson P 1057Dokument6 SeitenLesson P 1057bestdudearoundNoch keine Bewertungen
- PHY 210 - Chapter 1 - Rotional Motion - 2021Dokument44 SeitenPHY 210 - Chapter 1 - Rotional Motion - 2021Isa HifzonNoch keine Bewertungen