Das könnte Ihnen auch gefallen
- Des risques, des mines et des hommes: La perception du risque chez les mineurs de fond de l'Abitibi-TémiscamingueVon EverandDes risques, des mines et des hommes: La perception du risque chez les mineurs de fond de l'Abitibi-TémiscamingueNoch keine Bewertungen
- Corrige Rattrapage Dynamique Des Structures 2019 2020Dokument5 SeitenCorrige Rattrapage Dynamique Des Structures 2019 2020Soukaina EL HAMDINoch keine Bewertungen
- DDS Serie 3 2021Dokument2 SeitenDDS Serie 3 2021Sara BenameurNoch keine Bewertungen
- D Introduction À La Dynamique de StructuresDokument10 SeitenD Introduction À La Dynamique de Structuresnafaa_ali1375Noch keine Bewertungen
- Ds Mef 2011 GCVDokument3 SeitenDs Mef 2011 GCVMed Hacen MoustaphaNoch keine Bewertungen
- 04 Flexion Simple PDFDokument15 Seiten04 Flexion Simple PDFBouchraMahmoudiNoch keine Bewertungen
- TD Elément Fini Barre CorrDokument10 SeitenTD Elément Fini Barre CorrmoussaNoch keine Bewertungen
- Ch4-Action Du VentDokument27 SeitenCh4-Action Du VentAhmed HakmouniNoch keine Bewertungen
- Corrigé Pour M1 ENDokument8 SeitenCorrigé Pour M1 ENhichemNoch keine Bewertungen
- TD1 Vibration 2022 - 2023Dokument2 SeitenTD1 Vibration 2022 - 2023Hiba LanayaNoch keine Bewertungen
- Poussée Butée CorrigéDokument6 SeitenPoussée Butée CorrigéGuefrech khailNoch keine Bewertungen
- Correction EMD 2 MMC 2012Dokument2 SeitenCorrection EMD 2 MMC 2012PFENoch keine Bewertungen
- Exercices Corrigés - Réactions D'appuis3Dokument1 SeiteExercices Corrigés - Réactions D'appuis3BasiitoNoch keine Bewertungen
- AEP Lasse9Dokument3 SeitenAEP Lasse9Ahmed El MokademNoch keine Bewertungen
- RDM3Dokument35 SeitenRDM3TOURENoch keine Bewertungen
- Exo12 Corigé PDFDokument2 SeitenExo12 Corigé PDFyouceftliNoch keine Bewertungen
- Série 8 ExercicesDokument1 SeiteSérie 8 ExercicesAdam MounsiNoch keine Bewertungen
- Sujet D'examen de Résistance Des Matériaux 2019Dokument8 SeitenSujet D'examen de Résistance Des Matériaux 2019Lala BlancheNoch keine Bewertungen
- Chap7 Methode Des RotationsDokument26 SeitenChap7 Methode Des RotationsMamadou BambaNoch keine Bewertungen
- Calcul Des PannesDokument18 SeitenCalcul Des PannesAyoub FekkoukiNoch keine Bewertungen
- TD 4 CorrectionDokument3 SeitenTD 4 CorrectionAmm KenNoch keine Bewertungen
- TD 1 Forme Variationnelle CorrDokument6 SeitenTD 1 Forme Variationnelle CorrLe Père BéniNoch keine Bewertungen
- TD5 Corrige Dass GCV3 IpsasDokument9 SeitenTD5 Corrige Dass GCV3 IpsasRami Zekri100% (1)
- Exam 2012 ElfDokument3 SeitenExam 2012 ElfZakariaBouchbouk0% (1)
- Poutres en TreillisDokument6 SeitenPoutres en TreillisMedBng 22Noch keine Bewertungen
- Serie TD 1 L3GC 2020Dokument5 SeitenSerie TD 1 L3GC 2020Moussa Faye100% (1)
- INTEGRALDokument18 SeitenINTEGRALfahbiloufNoch keine Bewertungen
- Série 2 Méthodes EnergétiquesDokument7 SeitenSérie 2 Méthodes EnergétiquesNaima NaNoch keine Bewertungen
- Meflab V1Dokument7 SeitenMeflab V1Salah MohammedNoch keine Bewertungen
- GC 2017 LGC L3 S5 GS511 - RDMDokument8 SeitenGC 2017 LGC L3 S5 GS511 - RDMMAZOUZI AbdelhamidNoch keine Bewertungen
- Synthèse de La Méthode Des ForcesDokument15 SeitenSynthèse de La Méthode Des ForcesLEIS DJIFACKNoch keine Bewertungen
- TP CDS (Portique)Dokument5 SeitenTP CDS (Portique)lando de chanceNoch keine Bewertungen
- 6-Flexion Plane PDFDokument2 Seiten6-Flexion Plane PDFpascalNoch keine Bewertungen
- Ensemble Exo CB Selon Ec5 PDFDokument48 SeitenEnsemble Exo CB Selon Ec5 PDFFreddychairman KouakouNoch keine Bewertungen
- Chap 4 RDM 1Dokument15 SeitenChap 4 RDM 1ALIOUI ABDELHADI100% (1)
- Ds 2Dokument20 SeitenDs 2Ayoub HoussaineNoch keine Bewertungen
- Controle 1 MMCDokument2 SeitenControle 1 MMCsouhayb elmanssouriNoch keine Bewertungen
- ENTP Cours RDM Niveau Universitaire Partie 2 PDFDokument55 SeitenENTP Cours RDM Niveau Universitaire Partie 2 PDFSimplice Djouassi TiamNoch keine Bewertungen
- 3.dynamique Des Structures 1-SPDDL Equations de Mouvement-1Dokument60 Seiten3.dynamique Des Structures 1-SPDDL Equations de Mouvement-1BOUZIANE MessaoudNoch keine Bewertungen
- TD-MMC Series 3 4 2020-21Dokument4 SeitenTD-MMC Series 3 4 2020-21Nowe AhmadeNoch keine Bewertungen
- Série3 Rayleigh 2020Dokument3 SeitenSérie3 Rayleigh 2020Zack MahmoudiNoch keine Bewertungen
- Elast EMD2 2003Dokument2 SeitenElast EMD2 2003Ahmed Bel Haj BrahimNoch keine Bewertungen
- Mef m1 STR Part - 2Dokument36 SeitenMef m1 STR Part - 2rimah benredouaneNoch keine Bewertungen
- 002-Dimensionnement Des StructuresDokument87 Seiten002-Dimensionnement Des StructuresJesús Segura LunaNoch keine Bewertungen
- MEF Chap1 Calcul MatricielDokument33 SeitenMEF Chap1 Calcul MatricielMohamed SelmiNoch keine Bewertungen
- MEF DK Chap2 2 InterpolationDokument21 SeitenMEF DK Chap2 2 InterpolationMohamed SelmiNoch keine Bewertungen
- Organigramme Section Entierement ComprimeeDokument1 SeiteOrganigramme Section Entierement ComprimeeangeNoch keine Bewertungen
- Corrige - Serie1 - Dynamique Des Structures - 2020Dokument14 SeitenCorrige - Serie1 - Dynamique Des Structures - 2020taha fathallahNoch keine Bewertungen
- Corrigé KabbajDokument7 SeitenCorrigé KabbajAbdelhamid Dehayni AL AbdaliNoch keine Bewertungen
- Dynamique Des Structures - Cours2 - 2019 PDFDokument26 SeitenDynamique Des Structures - Cours2 - 2019 PDFSamagassi SouleymaneNoch keine Bewertungen
- Examen Béton ArméDokument10 SeitenExamen Béton ArméboscoNoch keine Bewertungen
- Poutre ÉquationsDokument4 SeitenPoutre Équationsiraoui jamal (Ebay)Noch keine Bewertungen
- TD Elements Finis CanalDokument8 SeitenTD Elements Finis CanalMourad TargaouiNoch keine Bewertungen
- DS 2013-2014Dokument2 SeitenDS 2013-2014jihenk100% (1)
- Dchapitre 4Dokument13 SeitenDchapitre 4Salma ElkaddouriNoch keine Bewertungen
- CH2 TD Exe31 CorrigéDokument5 SeitenCH2 TD Exe31 CorrigéSERGIONoch keine Bewertungen
- Examen RDM IIDokument2 SeitenExamen RDM IIMarouane BoussellamiNoch keine Bewertungen
- TD1 Ipeit 2021 2022Dokument3 SeitenTD1 Ipeit 2021 2022AbdAllah AttounisiNoch keine Bewertungen
- 12-CHAPITRE 03 Étude Du PlancherDokument23 Seiten12-CHAPITRE 03 Étude Du PlancherYoucef SI100% (1)
- Chap5 Calcul Des Systèmes Plans Par La Méthode Des ForcesDokument11 SeitenChap5 Calcul Des Systèmes Plans Par La Méthode Des Forceshammou100% (1)
- Customer Access Request Form (FR)Dokument2 SeitenCustomer Access Request Form (FR)2ste3100% (1)
- 117473800Dokument7 Seiten1174738002ste3Noch keine Bewertungen
- Leamateriaux PDFDokument26 SeitenLeamateriaux PDFLassouag ChafaaNoch keine Bewertungen
- Place Des Canadiens Mairie Place Des Canadiens Mairie: Saint-Germain Colombelles Saint-Germain ColombellesDokument7 SeitenPlace Des Canadiens Mairie Place Des Canadiens Mairie: Saint-Germain Colombelles Saint-Germain Colombelles2ste3Noch keine Bewertungen
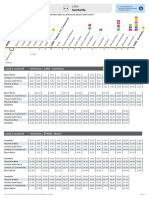
- Baclesse Poincaré Baclesse Poincaré: Caen Caen Caen CaenDokument7 SeitenBaclesse Poincaré Baclesse Poincaré: Caen Caen Caen Caen2ste3Noch keine Bewertungen
- Leamateriaux PDFDokument26 SeitenLeamateriaux PDFLassouag ChafaaNoch keine Bewertungen
- Structures A Ossature BoisDokument37 SeitenStructures A Ossature BoiskotonNoch keine Bewertungen
- CV SandrineBisson PDFDokument6 SeitenCV SandrineBisson PDF2ste3Noch keine Bewertungen
- Parc Charlotte Corday Parc Charlotte Corday: Blainville Mondeville Blainville MondevilleDokument7 SeitenParc Charlotte Corday Parc Charlotte Corday: Blainville Mondeville Blainville Mondeville2ste3Noch keine Bewertungen
- Education Liste-Etknpudiants PCDokument27 SeitenEducation Liste-Etknpudiants PC2ste3Noch keine Bewertungen
- 1436 7 PDFDokument4 Seiten1436 7 PDF2ste3Noch keine Bewertungen
- 1436 7 PDFDokument4 Seiten1436 7 PDF2ste3Noch keine Bewertungen
- Aéroport Jean Vilar Aéroport Jean Vilar: Carpiquet IFS Carpiquet IFSDokument7 SeitenAéroport Jean Vilar Aéroport Jean Vilar: Carpiquet IFS Carpiquet IFS2ste3Noch keine Bewertungen
- Centre Commercial Jean Vilar Centre Commercial Jean Vilar: Hérouville IFS Hérouville IFSDokument7 SeitenCentre Commercial Jean Vilar Centre Commercial Jean Vilar: Hérouville IFS Hérouville IFS2ste3Noch keine Bewertungen
- Beaulieu - Brazza Mémorial Beaulieu - Brazza Mémorial: Caen Caen Caen CaenDokument9 SeitenBeaulieu - Brazza Mémorial Beaulieu - Brazza Mémorial: Caen Caen Caen Caen2ste3Noch keine Bewertungen
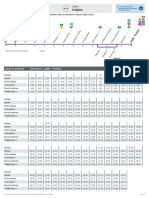
- Lebisey Théâtre Lebisey Théâtre: Hérouville Caen Hérouville CaenDokument7 SeitenLebisey Théâtre Lebisey Théâtre: Hérouville Caen Hérouville Caen2ste3Noch keine Bewertungen
- Logiciel D'Application de La Reglementation Thermique 2012 Fiche D'ÉvaluationDokument4 SeitenLogiciel D'Application de La Reglementation Thermique 2012 Fiche D'Évaluation2ste3Noch keine Bewertungen
- Rapport Essai Permeabilite ISOLASUP PDFDokument5 SeitenRapport Essai Permeabilite ISOLASUP PDF2ste3Noch keine Bewertungen
- Guide Technique Transferts D'humiditeDokument4 SeitenGuide Technique Transferts D'humidite2ste3Noch keine Bewertungen
- Umurigirwa 1172Dokument10 SeitenUmurigirwa 1172Rabiâ AbdeldjebarNoch keine Bewertungen
- Versement DirectDokument1 SeiteVersement Direct2ste3Noch keine Bewertungen
- 3R Mesure Conductivit Thermique Mthode FIL CHAUDDokument2 Seiten3R Mesure Conductivit Thermique Mthode FIL CHAUDMohamed RegueNoch keine Bewertungen
- Guide Technique Transferts D'humidite PDFDokument74 SeitenGuide Technique Transferts D'humidite PDF2ste3100% (1)
- Correction TD2 Exo4Dokument6 SeitenCorrection TD2 Exo4Oumaïma El AbidiNoch keine Bewertungen
- Method eDokument1 SeiteMethod e2ste3Noch keine Bewertungen
- TD m1 Edp PDFDokument27 SeitenTD m1 Edp PDF2ste3Noch keine Bewertungen
- Introduction À La Méthode Des Éléments Finis - KERN MichelDokument68 SeitenIntroduction À La Méthode Des Éléments Finis - KERN Michelanahimc100% (2)
- TD2 MipcDokument3 SeitenTD2 MipcRupenbole SmithNoch keine Bewertungen
- Equation d' Une DroiteDokument6 SeitenEquation d' Une DroiteOmar chhaimaNoch keine Bewertungen
- 1G Cours Chapitre 9 IDokument11 Seiten1G Cours Chapitre 9 IMesum AbbasNoch keine Bewertungen
- 18 Fiche EvDokument2 Seiten18 Fiche EvdededeNoch keine Bewertungen
- Formation MATLABDokument19 SeitenFormation MATLABabdellah romaniNoch keine Bewertungen
- Géométrie de L'espace Exercices-8Dokument22 SeitenGéométrie de L'espace Exercices-8BenmehidiBatallNoch keine Bewertungen
- Cours Nombres Premiers Et PPCMDokument6 SeitenCours Nombres Premiers Et PPCMBob MinkaNoch keine Bewertungen
- DualcorDokument5 SeitenDualcorÇa M'excite Le TopNoch keine Bewertungen
- HAX501X - Groupes Et Anneaux 1 CM4 15/09/2023: CL Ement DupontDokument30 SeitenHAX501X - Groupes Et Anneaux 1 CM4 15/09/2023: CL Ement Dupontlogement31Noch keine Bewertungen
- Leçon 2 Racines CarréesDokument8 SeitenLeçon 2 Racines CarréesDieu Est FidèleNoch keine Bewertungen
- 1SMATHDevoir Corrigé de Synthèse N°1Dokument6 Seiten1SMATHDevoir Corrigé de Synthèse N°1Mohamed SaidiNoch keine Bewertungen
- La Division Euclidienne Et Decimale Cours de Maths en 6eme A Imprimer en PDFDokument5 SeitenLa Division Euclidienne Et Decimale Cours de Maths en 6eme A Imprimer en PDFkado01nathaliaNoch keine Bewertungen
- 05 ComplexeDokument6 Seiten05 ComplexeDramane MaïgaNoch keine Bewertungen
- Rendre RationnelDokument3 SeitenRendre RationnelRola YounesNoch keine Bewertungen
- Revisions Algebre Lineaire ResDokument4 SeitenRevisions Algebre Lineaire ResAime Desire wogouNoch keine Bewertungen
- Chapitre 3 Cours STRM1 USTHBDokument62 SeitenChapitre 3 Cours STRM1 USTHBmaloukdz32Noch keine Bewertungen
- WACKERNAGEL Cours 00500 PDFDokument87 SeitenWACKERNAGEL Cours 00500 PDFAchraf AaRôchêNoch keine Bewertungen
- Exercices Chap 23Dokument3 SeitenExercices Chap 23Christian DjengueNoch keine Bewertungen
- Maths NS IV (SMP - SVT)Dokument41 SeitenMaths NS IV (SMP - SVT)Juan50% (2)
- TD1 2019 20 CorrectionDokument13 SeitenTD1 2019 20 CorrectionKayl MidoNoch keine Bewertungen
- Cours Maths 1èrecDokument158 SeitenCours Maths 1èrecMaxwell Kamga100% (2)
- Sujet 1Dokument1 SeiteSujet 1Arwa RoraNoch keine Bewertungen
- Coefficient Directeur Et Ordonnee A L Origine D Une Fonction Affine Corriges D ExercicesDokument1 SeiteCoefficient Directeur Et Ordonnee A L Origine D Une Fonction Affine Corriges D ExercicesHamza AlaouiNoch keine Bewertungen
- ALGG2 INFsyllabusDokument99 SeitenALGG2 INFsyllabusdani bashengeziNoch keine Bewertungen
- Devoir 1 ArithmetiqueDokument1 SeiteDevoir 1 ArithmetiqueAzera RaeNoch keine Bewertungen
- X1985 PDFDokument2 SeitenX1985 PDFAli MounaNoch keine Bewertungen
- Devoir Libre 03 23Dokument2 SeitenDevoir Libre 03 23Adam El MouddeneNoch keine Bewertungen
- cc2 CorDokument3 Seitencc2 CorHedi cherifNoch keine Bewertungen
- 19calc AlgebriquemDokument7 Seiten19calc AlgebriquemtchokoNoch keine Bewertungen
- Annexe VecteursDokument7 SeitenAnnexe VecteursRim BounadiNoch keine Bewertungen