Das könnte Ihnen auch gefallen
- Engineering Drawing from the Beginning: The Commonwealth and International Library: Mechanical Engineering DivisionVon EverandEngineering Drawing from the Beginning: The Commonwealth and International Library: Mechanical Engineering DivisionBewertung: 4.5 von 5 Sternen4.5/5 (3)
- Piping Handbook - Hydrocarbon Processing - 1968Dokument140 SeitenPiping Handbook - Hydrocarbon Processing - 1968VS271294% (16)
- UH-60A Blackhawk Eng. Simulation Program, Vol. 1, Math ModelDokument361 SeitenUH-60A Blackhawk Eng. Simulation Program, Vol. 1, Math Modelmanitheaerialfighter100% (1)
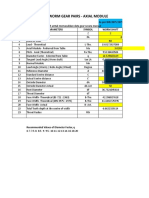
- Worm Gear Formula-MasterDokument30 SeitenWorm Gear Formula-Masterer_winwibowoNoch keine Bewertungen
- Gordon NovelDokument50 SeitenGordon NovelNic Hotep100% (2)
- Bevel Gear Formula - MasterDokument191 SeitenBevel Gear Formula - Masterer_winwibowo100% (1)
- Dimensional Tolerance ChartDokument1 SeiteDimensional Tolerance Chartpushkar_k123Noch keine Bewertungen
- Nozzle Reinforcement Calculation Excel SheetDokument3 SeitenNozzle Reinforcement Calculation Excel Sheetramesh punjabiNoch keine Bewertungen
- RC Beam Design Using ACIDokument1 SeiteRC Beam Design Using ACIdantevariasNoch keine Bewertungen
- CH3 Worm Gear Design-1Dokument38 SeitenCH3 Worm Gear Design-1Abaziz Mousa OutlawZzNoch keine Bewertungen
- Worm Gear PairDokument585 SeitenWorm Gear Pairer_winwibowoNoch keine Bewertungen
- Spring CalculationDokument24 SeitenSpring Calculationmahaprabhu78100% (1)
- Calculation of Gear Dimensions - KHK Gears PDFDokument25 SeitenCalculation of Gear Dimensions - KHK Gears PDFlawlawNoch keine Bewertungen
- Educational Solutions From Schneider ElectricDokument164 SeitenEducational Solutions From Schneider ElectricfaneeeeeeNoch keine Bewertungen
- NDS 11.3.1 Lateral Design Values ZDokument6 SeitenNDS 11.3.1 Lateral Design Values Zpazz0Noch keine Bewertungen
- Gear Design CalcDokument2 SeitenGear Design Calcomprakashd4196Noch keine Bewertungen
- Spiral Bevel Gear Arcoid System ZFTKK 250-1Dokument4 SeitenSpiral Bevel Gear Arcoid System ZFTKK 250-1er_winwibowo100% (2)
- Engine Maintenance PartsDokument13 SeitenEngine Maintenance PartsSerkanAl100% (1)
- Studding FlangeDokument6 SeitenStudding FlangeDarshan PanchalNoch keine Bewertungen
- Slope Stabliity - Bishop MethodDokument1 SeiteSlope Stabliity - Bishop MethodPiseyNoch keine Bewertungen
- Wind Load & Blow Off Calculation NMML1Dokument14 SeitenWind Load & Blow Off Calculation NMML1Ankit AgarwalNoch keine Bewertungen
- Theory of Dielectric Optical Waveguides 2eVon EverandTheory of Dielectric Optical Waveguides 2ePaul LiaoNoch keine Bewertungen
- It Should Be Less Than R /3 or 10mDokument5 SeitenIt Should Be Less Than R /3 or 10mMawan BentzNoch keine Bewertungen
- BEVEL Gear CalculationsDokument4 SeitenBEVEL Gear CalculationsParesh KareliyaNoch keine Bewertungen
- Debre Birhan University: College of Enigneering Departmrt of Mechamnical EnigineerigDokument19 SeitenDebre Birhan University: College of Enigneering Departmrt of Mechamnical EnigineerigDagmawi MenweyeletNoch keine Bewertungen
- Gear Dimensions Are Determined in Accordance With Their SpecificationsDokument60 SeitenGear Dimensions Are Determined in Accordance With Their SpecificationsChetan PrajapatiNoch keine Bewertungen
- Calculation of Gear DimensionsDokument22 SeitenCalculation of Gear DimensionsdressfeetNoch keine Bewertungen
- Spur GearsDokument7 SeitenSpur GearsAkshay JadhavNoch keine Bewertungen
- SFL Milling Calculation 125Dokument1 SeiteSFL Milling Calculation 125PRAVEEN ENoch keine Bewertungen
- Kinds of GearsDokument51 SeitenKinds of GearsIrfanNoch keine Bewertungen
- Calculation of Gear Dimensions - KHK Gears - Bevel Gears PDFDokument10 SeitenCalculation of Gear Dimensions - KHK Gears - Bevel Gears PDFPrasad PatilNoch keine Bewertungen
- Power and Force Calculations Face Milling1Dokument1 SeitePower and Force Calculations Face Milling1PRAVEEN ENoch keine Bewertungen
- Fundamentals: Accurately Placed Adequately Supported Shall Be Secured Against DisplacementDokument18 SeitenFundamentals: Accurately Placed Adequately Supported Shall Be Secured Against DisplacementSylvestre UbaNoch keine Bewertungen
- Фланцевые соединения dast v4.3 - EDokument3 SeitenФланцевые соединения dast v4.3 - EZdrobau VitalieNoch keine Bewertungen
- Gear Mathematics For Bevel & Hypoid GearsDokument7 SeitenGear Mathematics For Bevel & Hypoid GearsDiego CarrascoNoch keine Bewertungen
- MMB411 Tutorial - Gears01 Fundamentals PDFDokument29 SeitenMMB411 Tutorial - Gears01 Fundamentals PDFNdivhuwo NdivhuwoNoch keine Bewertungen
- Ball Screw CalculatorDokument4 SeitenBall Screw Calculatorinfo.av225Noch keine Bewertungen
- Connection Design: B19-CI: Units: Kip-In Story: Story1 Design Code: AISC 360-10Dokument6 SeitenConnection Design: B19-CI: Units: Kip-In Story: Story1 Design Code: AISC 360-10surbanoj_79Noch keine Bewertungen
- Design of Column-Beam Bolted ConnectionsDokument5 SeitenDesign of Column-Beam Bolted ConnectionsSamwel KuriaNoch keine Bewertungen
- Spiral Bevel Gear Arcoid System ZFTKK 250-1Dokument2 SeitenSpiral Bevel Gear Arcoid System ZFTKK 250-1er_winwibowoNoch keine Bewertungen
- Spur GearDokument80 SeitenSpur GearLutfhi HanafiNoch keine Bewertungen
- Gear - SolutionDokument32 SeitenGear - SolutionR PNoch keine Bewertungen
- Chap 7 - Worm DriveDokument33 SeitenChap 7 - Worm DriveHuỳnh Nguyễn Thiên TânNoch keine Bewertungen
- Docente: M.Sc. Ing. Jaime Sotero Rojas Aguirre: Slope Stability - Slip Circle AnalysisDokument2 SeitenDocente: M.Sc. Ing. Jaime Sotero Rojas Aguirre: Slope Stability - Slip Circle AnalysisDavid A Ismael SedaNoch keine Bewertungen
- Bar With End Standard Hooks: (See ACI DETAILING MANUAL-2004 TABLE-1)Dokument7 SeitenBar With End Standard Hooks: (See ACI DETAILING MANUAL-2004 TABLE-1)AlbyNoch keine Bewertungen
- Etabs 2016 16.2Dokument6 SeitenEtabs 2016 16.2kervinarmasNoch keine Bewertungen
- Topic5 Spur GearDokument31 SeitenTopic5 Spur Gearsyafiq hashimNoch keine Bewertungen
- Mechanical Springs: Exert Force. Provide Flexibility. Store or Absorb EnergyDokument68 SeitenMechanical Springs: Exert Force. Provide Flexibility. Store or Absorb EnergyOtis Chu100% (1)
- Chumbadouros Portico Contraventamento FachadaDokument3 SeitenChumbadouros Portico Contraventamento FachadaNunoSilvaNoch keine Bewertungen
- Simply Supported: 3+v WD /64 1-E (1+3v) EDokument2 SeitenSimply Supported: 3+v WD /64 1-E (1+3v) EAamirShabbirNoch keine Bewertungen
- Modeling Edging Forces in Skiing Using Merchant's Theory For Metal CuttingDokument23 SeitenModeling Edging Forces in Skiing Using Merchant's Theory For Metal CuttingAhmed GamalNoch keine Bewertungen
- One Side Beam-Beam ConnectionDokument1 SeiteOne Side Beam-Beam Connectionsamon.itc2019Noch keine Bewertungen
- Designing "Slab Type" Raft / Footing For Bending Moment and One-Way ShearDokument8 SeitenDesigning "Slab Type" Raft / Footing For Bending Moment and One-Way ShearMuhammad HasanNoch keine Bewertungen
- 5 - Threaded Fasteners PDFDokument60 Seiten5 - Threaded Fasteners PDFPradyunn HoraNoch keine Bewertungen
- Stress Calculation.: Figure #1 Contains A Visual Representation of The Terms Related To Spur Gears and To The Tooth RootDokument6 SeitenStress Calculation.: Figure #1 Contains A Visual Representation of The Terms Related To Spur Gears and To The Tooth RootMatija RepincNoch keine Bewertungen
- Footing On PilesDokument6 SeitenFooting On PilesAiko VillaluzNoch keine Bewertungen
- a R i z m mn b α β fo c x Ψ Ψm ΨyDokument6 Seitena R i z m mn b α β fo c x Ψ Ψm ΨykuttuasrNoch keine Bewertungen
- Drilling Machine CalculationDokument8 SeitenDrilling Machine CalculationAakash SNoch keine Bewertungen
- Shafts With SampleDokument6 SeitenShafts With Samplewaar lockNoch keine Bewertungen
- Fabrication of RSB - 2016Dokument21 SeitenFabrication of RSB - 2016Briones GogocNoch keine Bewertungen
- Machine Design MD by S K Mondal T&Q.0001Dokument70 SeitenMachine Design MD by S K Mondal T&Q.0001Thalari AdithyaNoch keine Bewertungen
- 4 - Combined FootingDokument2 Seiten4 - Combined FootingABAMELANoch keine Bewertungen
- Machine Design MD by S K Mondal T&QDokument263 SeitenMachine Design MD by S K Mondal T&QHamdy HassanNoch keine Bewertungen
- Design of Continuos Beam As Per IS 456-2000 1) Design Data: Eff CK 2 2Dokument5 SeitenDesign of Continuos Beam As Per IS 456-2000 1) Design Data: Eff CK 2 2khaniskhan03Noch keine Bewertungen
- Cylindrical Compression Helix Springs For Suspension SystemsVon EverandCylindrical Compression Helix Springs For Suspension SystemsNoch keine Bewertungen
- Ref Optimasi Model Elektrode Pada Sistem Pengukuran Potensial Titik Akupuntur Secara Non Invasive Untuk Diagnosis Fungsional OrganDokument13 SeitenRef Optimasi Model Elektrode Pada Sistem Pengukuran Potensial Titik Akupuntur Secara Non Invasive Untuk Diagnosis Fungsional OrganSteven WijayNoch keine Bewertungen
- PANEL AD15 EXCLUSIVE 77mmDokument1 SeitePANEL AD15 EXCLUSIVE 77mmSteven WijayNoch keine Bewertungen
- Analysis of Spring-Back During Forming of The Element Made of Ams 5604 Steel PDFDokument8 SeitenAnalysis of Spring-Back During Forming of The Element Made of Ams 5604 Steel PDFSteven WijayNoch keine Bewertungen
- 3/8 in 9.525mm 12.70mm 15.875mm 1.2446 MM 19.05mm 1.6002mm 31.75mm 2.3876mm 44.45mm 50.80mm 63.50mm 76.20mm 88.90mmDokument2 Seiten3/8 in 9.525mm 12.70mm 15.875mm 1.2446 MM 19.05mm 1.6002mm 31.75mm 2.3876mm 44.45mm 50.80mm 63.50mm 76.20mm 88.90mmSteven WijayNoch keine Bewertungen
- ParallelShaftDrives Dimension Drawing For CadDokument54 SeitenParallelShaftDrives Dimension Drawing For CadSteven WijayNoch keine Bewertungen
- GMP Male BearingDokument3 SeitenGMP Male BearingMahdi HajizadehNoch keine Bewertungen
- Preview ISO+749-1977 PDFDokument3 SeitenPreview ISO+749-1977 PDFLiana GaniNoch keine Bewertungen
- Concept of Circulation in A Free Vortex FlowDokument55 SeitenConcept of Circulation in A Free Vortex FlowAnil KumarNoch keine Bewertungen
- Schneider EngineeringDokument1 SeiteSchneider EngineeringT.J. MayesNoch keine Bewertungen
- 1998-10 The Computer Paper - Ontario EditionDokument156 Seiten1998-10 The Computer Paper - Ontario Editionthecomputerpaper100% (1)
- zx350lc 3 InglesDokument6 Seitenzx350lc 3 InglesLuis Nahuelhuaique LemusNoch keine Bewertungen
- Car DeerDokument2 SeitenCar DeerNEGameandParksNoch keine Bewertungen
- Braun KF40 - CDokument17 SeitenBraun KF40 - CAgung UtoyoNoch keine Bewertungen
- SR No Co Name Salutation Person Designation Contact NoDokument4 SeitenSR No Co Name Salutation Person Designation Contact NoAnindya SharmaNoch keine Bewertungen
- SinxbyxDokument9 SeitenSinxbyxGreeshmaNoch keine Bewertungen
- Optimizing Technique-Grenade Explosion MethodDokument18 SeitenOptimizing Technique-Grenade Explosion MethodUday Wankar100% (1)
- Zaroulas Mies Fullpaper 2020 05 21Dokument9 SeitenZaroulas Mies Fullpaper 2020 05 21sidgonzoNoch keine Bewertungen
- Slope Stability in Slightly Fissured Claystones and MarlsDokument25 SeitenSlope Stability in Slightly Fissured Claystones and MarlsrullyirwandiNoch keine Bewertungen
- TD Quintolubric 888 68Dokument2 SeitenTD Quintolubric 888 68Haitham YoussefNoch keine Bewertungen
- Advanced Cooling System - EMD00253ENDokument4 SeitenAdvanced Cooling System - EMD00253ENnarayanan_anoob0% (1)
- Antikythera MechanismDokument25 SeitenAntikythera MechanismchetansergiurazvanNoch keine Bewertungen
- Rational Suite ToolsDokument47 SeitenRational Suite ToolsZatin GuptaNoch keine Bewertungen
- Mechanical Workshop Practice ReportDokument6 SeitenMechanical Workshop Practice ReportMuhd AkmalNoch keine Bewertungen
- Lecure Two. ReactorsDokument56 SeitenLecure Two. ReactorsSophia WambuiNoch keine Bewertungen
- MILL Series GB-1007 01Dokument20 SeitenMILL Series GB-1007 01Ady IonutNoch keine Bewertungen
- Determination of The Solubility Product Constant of Silver AcetateDokument8 SeitenDetermination of The Solubility Product Constant of Silver AcetateSara Al AzemNoch keine Bewertungen
- Turbin 1Dokument27 SeitenTurbin 1Durjoy Chakraborty100% (1)
- Internship Report May 2016Dokument11 SeitenInternship Report May 2016Rupini RagaviahNoch keine Bewertungen
- SQ Presentation 2021-r2Dokument43 SeitenSQ Presentation 2021-r2nadeem4ahmed-805026Noch keine Bewertungen
- Supplier GPO Q TM 0001 02 SPDCR TemplateDokument6 SeitenSupplier GPO Q TM 0001 02 SPDCR TemplateMahe RonaldoNoch keine Bewertungen