Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5783)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Catalogo Audio 12-06-2023Dokument45 SeitenCatalogo Audio 12-06-2023Francisco RiveraNoch keine Bewertungen
- 3AH3Dokument44 Seiten3AH3wwwdotcomatNoch keine Bewertungen
- Digital Logic Design Chapter 1Dokument55 SeitenDigital Logic Design Chapter 1መሰረቴ ግርማይNoch keine Bewertungen
- Anits ECE SyllabusDokument185 SeitenAnits ECE SyllabusY. S.V.Ramana raoNoch keine Bewertungen
- How To Add Hard Disk As CacheDokument6 SeitenHow To Add Hard Disk As CacheGary John Managbanag YuNoch keine Bewertungen
- 006-0129-00 REV F Atr - SpecificationsDokument1 Seite006-0129-00 REV F Atr - SpecificationsShawn DownloaderNoch keine Bewertungen
- DO Fuse UnitDokument8 SeitenDO Fuse UnitImran KhanNoch keine Bewertungen
- VPBDokument7 SeitenVPBKike LimoNoch keine Bewertungen
- Chapter 10 Group 2Dokument8 SeitenChapter 10 Group 2Vjayan DharmaNoch keine Bewertungen
- Nec Pasolink NeoDokument57 SeitenNec Pasolink NeohheinsNoch keine Bewertungen
- Example 1: Simplify The Following Boolean Expression. Using Boolean Algebra Postulates andDokument10 SeitenExample 1: Simplify The Following Boolean Expression. Using Boolean Algebra Postulates andMohamed ZaideNoch keine Bewertungen
- List of German ProfessorsDokument3 SeitenList of German ProfessorsDr-Nikesh IngleNoch keine Bewertungen
- An Introduction To Plasma RF GeneratorsDokument2 SeitenAn Introduction To Plasma RF Generatorshellerx44Noch keine Bewertungen
- DS100S AC Servo Drive ManualDokument23 SeitenDS100S AC Servo Drive ManualJuan Francisco Sanchez MassadiNoch keine Bewertungen
- CorexII User ManualDokument6 SeitenCorexII User ManualTechne PhobosNoch keine Bewertungen
- Flexi Multiradio OverviewDokument18 SeitenFlexi Multiradio OverviewJon Snow-Stark50% (2)
- Enrollment NoDokument5 SeitenEnrollment Nosanjit kumarNoch keine Bewertungen
- Go MBW5000 WLP510Dokument2 SeitenGo MBW5000 WLP510WERMERMNoch keine Bewertungen
- DR 800 (English - Datasheet)Dokument6 SeitenDR 800 (English - Datasheet)Luise AquinoNoch keine Bewertungen
- The HP-Compaq MergerDokument22 SeitenThe HP-Compaq MergerAshish Agarwal100% (1)
- Rugged Seal Style Analog Panel Meters: Ordering InformationDokument3 SeitenRugged Seal Style Analog Panel Meters: Ordering InformationAF VMNoch keine Bewertungen
- Lab 08: Construct Half and Full Subtractor CircuitsDokument7 SeitenLab 08: Construct Half and Full Subtractor CircuitsAbdul BasitNoch keine Bewertungen
- QSC KLA12 KLA181 Ground Stack Bundle Pack II ZZoundsDokument1 SeiteQSC KLA12 KLA181 Ground Stack Bundle Pack II ZZoundsmanuelNoch keine Bewertungen
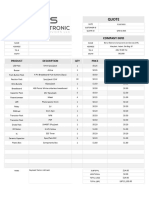
- Quote #1603 - Electronics Starter KitDokument1 SeiteQuote #1603 - Electronics Starter KitHala ItaniNoch keine Bewertungen
- Basic Knowledge of Discrete Semiconductor Device - Toshiba Electronic Devices & Storage Corporation - Asia-EnglishDokument10 SeitenBasic Knowledge of Discrete Semiconductor Device - Toshiba Electronic Devices & Storage Corporation - Asia-EnglishReetipragya SinghNoch keine Bewertungen
- Problem+Set+Applications 1Dokument17 SeitenProblem+Set+Applications 1Giezel RevisNoch keine Bewertungen
- MCC400-23 LV Switchgear Wiring DiagramDokument49 SeitenMCC400-23 LV Switchgear Wiring DiagramFatholla SalehiNoch keine Bewertungen
- SJ-20140312095717-004-ZXA10 C300 (V2.0.1) Optical Access Convergence Equipment Hardware DescriptionDokument56 SeitenSJ-20140312095717-004-ZXA10 C300 (V2.0.1) Optical Access Convergence Equipment Hardware Descriptionccbs2010100% (1)
- 6P14P, 6P14P-V, 6P14P-EV (6n14n, 6n14n-B, 6n14n-EB) GeneralDokument2 Seiten6P14P, 6P14P-V, 6P14P-EV (6n14n, 6n14n-B, 6n14n-EB) GeneralmauriciobtbNoch keine Bewertungen
- Lap Top Repair Book Chapter 2 Chapter11 Analysis of Wistron OEM Laptop CircuitDokument58 SeitenLap Top Repair Book Chapter 2 Chapter11 Analysis of Wistron OEM Laptop CircuitIsaac PerezNoch keine Bewertungen