Das könnte Ihnen auch gefallen
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Von EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Bewertung: 2.5 von 5 Sternen2.5/5 (3)
- Chapter 3Dokument11 SeitenChapter 3Aung MyatNoch keine Bewertungen
- DIY Arduino - Familara, Bezalel G.Dokument10 SeitenDIY Arduino - Familara, Bezalel G.Dharim NagutomNoch keine Bewertungen
- Laser Security System For HomeDokument19 SeitenLaser Security System For HomeSelvakumar SubramaniNoch keine Bewertungen
- Arduino Base Hardware EquipmentsDokument22 SeitenArduino Base Hardware EquipmentsAtiqueNoch keine Bewertungen
- Power FactorDokument25 SeitenPower FactorSri Sai ComputersNoch keine Bewertungen
- DIY Arduibo UNO Documentation - Albay, Gem Erick DDokument10 SeitenDIY Arduibo UNO Documentation - Albay, Gem Erick DDharim NagutomNoch keine Bewertungen
- TheftDokument12 SeitenTheftEmeka Nelson OffornedoNoch keine Bewertungen
- 0-30 VDC Stabilized Power Supply With CurrentDokument8 Seiten0-30 VDC Stabilized Power Supply With CurrentDavid ReyesNoch keine Bewertungen
- Hardware Report SEMDokument22 SeitenHardware Report SEMtaufeeq.26.atihqNoch keine Bewertungen
- Adaptive Lighting System For Automobiles: A Project Report OnDokument13 SeitenAdaptive Lighting System For Automobiles: A Project Report Onashishgusain1991Noch keine Bewertungen
- Audio Level MeterDokument27 SeitenAudio Level MeterkrishnayahooNoch keine Bewertungen
- Notes: 3.1 Laser ClassesDokument9 SeitenNotes: 3.1 Laser ClassesAmlan BhuyanNoch keine Bewertungen
- Lesson 24 DC Motor ControlDokument9 SeitenLesson 24 DC Motor ControlYahya AIDARANoch keine Bewertungen
- 5.LDR Based Highways Road Light Failed Intimation Using GSMDokument44 Seiten5.LDR Based Highways Road Light Failed Intimation Using GSMfotronichs velloreNoch keine Bewertungen
- Atm Security PsyDokument84 SeitenAtm Security Psyarunraja98Noch keine Bewertungen
- Tired of Low Battery Voltage? Build A Step-Up DC-DC Converter!Dokument2 SeitenTired of Low Battery Voltage? Build A Step-Up DC-DC Converter!ferreira_tomarNoch keine Bewertungen
- Line Follower ROBOT Micro Controller 8051Dokument28 SeitenLine Follower ROBOT Micro Controller 8051Rohit XavierNoch keine Bewertungen
- PROJECT RIPORT ChapterDokument16 SeitenPROJECT RIPORT Chapterdarkfire28304Noch keine Bewertungen
- AC Dimmer: Components RequiredDokument8 SeitenAC Dimmer: Components Requiredovais123Noch keine Bewertungen
- Power-Electronics Ktuonline - in PDFDokument68 SeitenPower-Electronics Ktuonline - in PDFchippyviswanNoch keine Bewertungen
- N568PPTDokument29 SeitenN568PPTRavi PexelsNoch keine Bewertungen
- RF Controlled ApplianceDokument14 SeitenRF Controlled ApplianceNEX456Noch keine Bewertungen
- Touch Switch Project ReportDokument13 SeitenTouch Switch Project ReportGaurav Kumar60% (15)
- ProjectDokument28 SeitenProjectSatyanarayana GurramNoch keine Bewertungen
- Single Chip Electronic Dice: (1) ResistorDokument7 SeitenSingle Chip Electronic Dice: (1) Resistormohsankayani3462Noch keine Bewertungen
- Advanced Communication Design For Mobile Disabling at Restricted Areas Microcontroller:-FeaturesDokument8 SeitenAdvanced Communication Design For Mobile Disabling at Restricted Areas Microcontroller:-FeaturesIndhumathi MohanNoch keine Bewertungen
- Chapter 4 Hardware Description 4.1 Components ListDokument19 SeitenChapter 4 Hardware Description 4.1 Components ListDHARSHANA C PNoch keine Bewertungen
- PDD LabDokument29 SeitenPDD LabHariNarayanNoch keine Bewertungen
- Basic CompDokument27 SeitenBasic Compitamar_123Noch keine Bewertungen
- Clap SwitchDokument19 SeitenClap SwitchNithin Peter80% (5)
- Doc-Voice Controlled RobotDokument69 SeitenDoc-Voice Controlled Robotrock starNoch keine Bewertungen
- 3.1 Block Diagram & Components Description:: Fig: 3.1 Block Diagram of Cyclo-Converter Using MicrocontrollerDokument10 Seiten3.1 Block Diagram & Components Description:: Fig: 3.1 Block Diagram of Cyclo-Converter Using MicrocontrollerSwamyNoch keine Bewertungen
- Final PapersDokument16 SeitenFinal PapersIvy Suzette AlgosoNoch keine Bewertungen
- 132KV 2 Line Metering PanelDokument11 Seiten132KV 2 Line Metering PanelUsman RasheedNoch keine Bewertungen
- Design and Implementation of Mini Ups SystemDokument11 SeitenDesign and Implementation of Mini Ups SystemGhilman HabibNoch keine Bewertungen
- This Is 20 Watt Power Audio Amplifier Which Use IC LM1875 As Main ComponentDokument14 SeitenThis Is 20 Watt Power Audio Amplifier Which Use IC LM1875 As Main ComponentJc LastaNoch keine Bewertungen
- ReportDokument14 SeitenReportAkash SiboNoch keine Bewertungen
- Automatic Light Intensity Controller Using LDR and RelayDokument16 SeitenAutomatic Light Intensity Controller Using LDR and RelayJaswitha KonaNoch keine Bewertungen
- 11.chapter 3Dokument16 Seiten11.chapter 3hsushweyi tint28Noch keine Bewertungen
- EE-331 Lab ReportDokument5 SeitenEE-331 Lab Reportlaksh rathiNoch keine Bewertungen
- Arduino Uno Manuscript - MUSTASA, ANS KAYE M.Dokument7 SeitenArduino Uno Manuscript - MUSTASA, ANS KAYE M.Dharim NagutomNoch keine Bewertungen
- RF and GSM Based Wireless Power Theft MonitoringDokument27 SeitenRF and GSM Based Wireless Power Theft MonitoringDebashishParida50% (2)
- Quiz MasterDokument25 SeitenQuiz MasterTeja DharmaNoch keine Bewertungen
- Design of Single Input Multiple Output DC-DC Converter: Nirasha D. Ramteke Prof. Dr. Prakash G.BuradeDokument3 SeitenDesign of Single Input Multiple Output DC-DC Converter: Nirasha D. Ramteke Prof. Dr. Prakash G.BuradeRohit DuttaNoch keine Bewertungen
- 2.control of Heavy Electrical Loads Using DTMF SignalsDokument42 Seiten2.control of Heavy Electrical Loads Using DTMF Signalsfotronichs velloreNoch keine Bewertungen
- Arduino Based Underground Cable Fault Detection: Submitted By: AJIT .P. SINGH Faran AnsariDokument19 SeitenArduino Based Underground Cable Fault Detection: Submitted By: AJIT .P. SINGH Faran Ansariq8400Noch keine Bewertungen
- An 1031Dokument15 SeitenAn 1031suvamit87Noch keine Bewertungen
- Underground Cable Fault Distance Identifier Over Internet of Things (IOT) PlatformDokument57 SeitenUnderground Cable Fault Distance Identifier Over Internet of Things (IOT) PlatformAkshay bypNoch keine Bewertungen
- Kit InstructionsDokument10 SeitenKit InstructionsRM EletronicaNoch keine Bewertungen
- Driving Relays With stm32f407vgtx Microcontroller Using Uln2003 Relay DriverDokument12 SeitenDriving Relays With stm32f407vgtx Microcontroller Using Uln2003 Relay DriverAnonymous Nlaa5HNoch keine Bewertungen
- Technical InformationDokument31 SeitenTechnical Informationsarang abadagireNoch keine Bewertungen
- ICL8038 Function GeneratorDokument6 SeitenICL8038 Function Generatorvali dNoch keine Bewertungen
- Iphone Charger Schematic PDFDokument13 SeitenIphone Charger Schematic PDFilliliNoch keine Bewertungen
- Chapter Three2Dokument12 SeitenChapter Three2Fuh ValleryNoch keine Bewertungen
- Grid Tie Inverter Version 3Dokument17 SeitenGrid Tie Inverter Version 3ghjNoch keine Bewertungen
- DC Speed ControllersDokument12 SeitenDC Speed ControllersjsriNoch keine Bewertungen
- Interfacing Relays Using The Parallel Port: ContentsDokument11 SeitenInterfacing Relays Using The Parallel Port: ContentsAgoi GilbertNoch keine Bewertungen
- Parts of Energy Generating TilesDokument8 SeitenParts of Energy Generating TilesSahal T YousephNoch keine Bewertungen
- Aa83-001 Intermusic Stereo Intercom System Serial No. 2939 and LaterDokument41 SeitenAa83-001 Intermusic Stereo Intercom System Serial No. 2939 and Laterjerome chaussonNoch keine Bewertungen
- 180 - 8 Operating InstructionsDokument268 Seiten180 - 8 Operating InstructionsClaudiu GateaNoch keine Bewertungen
- General Purpose RegistersDokument3 SeitenGeneral Purpose RegistersAhmed SalamNoch keine Bewertungen
- Advanced Motion Controls B15A8Dokument8 SeitenAdvanced Motion Controls B15A8Servo2GoNoch keine Bewertungen
- Python Course SlidesDokument179 SeitenPython Course SlidesSree pujitha DoppalapudiNoch keine Bewertungen
- Number Based-Niven No 7th June21Dokument2 SeitenNumber Based-Niven No 7th June21Shailendra SinghNoch keine Bewertungen
- DTC P0500 Vehicle Speed Sensor "A": Circuit DescriptionDokument4 SeitenDTC P0500 Vehicle Speed Sensor "A": Circuit Descriptionjeremih alhegnNoch keine Bewertungen
- PenPoint Development Tools June 1992Dokument314 SeitenPenPoint Development Tools June 1992pablo_marxNoch keine Bewertungen
- Low-Power, +2.5V To +5.5V, Dual 8-Bit Voltage-Output DAC in MAXDokument8 SeitenLow-Power, +2.5V To +5.5V, Dual 8-Bit Voltage-Output DAC in MAXmegdiNoch keine Bewertungen
- SeisImager Installation Instructions v7.5Dokument1 SeiteSeisImager Installation Instructions v7.5Manuel Alejandro Estrada OchoaNoch keine Bewertungen
- Manual Protection Testing: The Easy WayDokument6 SeitenManual Protection Testing: The Easy WayAdem ČehoNoch keine Bewertungen
- Unit 3 FIOTDokument21 SeitenUnit 3 FIOT196c1a0214 Mohammad Farheen SiddiqahNoch keine Bewertungen
- Intro To USB-6009 DAQDokument10 SeitenIntro To USB-6009 DAQusep syaikal arifinNoch keine Bewertungen
- AVR Microcontroller TestDokument9 SeitenAVR Microcontroller TestNiranjan AgravatNoch keine Bewertungen
- Create Bootable USB Flash Drive To Install Windows 10 - TutorialsDokument2 SeitenCreate Bootable USB Flash Drive To Install Windows 10 - Tutorialsxi siNoch keine Bewertungen
- Vista Plus Interface For Oracle E-Business Suite User Guide PDFDokument170 SeitenVista Plus Interface For Oracle E-Business Suite User Guide PDFparvathi12100% (1)
- Texas Instruments Incorporated: TMS320VC5402 DSKDokument22 SeitenTexas Instruments Incorporated: TMS320VC5402 DSK0106062007Noch keine Bewertungen
- DB2 Tech Talk PureData Systems Presentation PDFDokument65 SeitenDB2 Tech Talk PureData Systems Presentation PDFkaishidenNoch keine Bewertungen
- Compute The Median of A Data FileDokument3 SeitenCompute The Median of A Data Filedodoman666Noch keine Bewertungen
- Brocade Director Cookbook For DCX Backbone FamilyDokument198 SeitenBrocade Director Cookbook For DCX Backbone Familychean04Noch keine Bewertungen
- 6 Data Storage and QueryingDokument58 Seiten6 Data Storage and Queryingfdghj100% (1)
- AggregationDokument71 SeitenAggregationGuruNoch keine Bewertungen
- Hand Gesture Controlled Robot.Dokument70 SeitenHand Gesture Controlled Robot.Aditya SharmaNoch keine Bewertungen
- Anzama Tech Company - ProfileDokument20 SeitenAnzama Tech Company - ProfilejabbarNoch keine Bewertungen
- 2013 Course Structure BTech CSEDokument32 Seiten2013 Course Structure BTech CSEMankush JainNoch keine Bewertungen
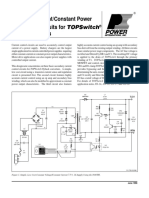
- Constant Current/Constant Power Regulation Circuits For: TopswitchDokument16 SeitenConstant Current/Constant Power Regulation Circuits For: TopswitchBharat Singh AhluwaliaNoch keine Bewertungen
- Literature Review On Automatic Night Lamp With Morning AlarmDokument5 SeitenLiterature Review On Automatic Night Lamp With Morning Alarmgw2wr9ssNoch keine Bewertungen
- ITN - 13-ch 8Dokument27 SeitenITN - 13-ch 8abduylelahNoch keine Bewertungen
- Balaraj SR Ui Front End DeveloperDokument10 SeitenBalaraj SR Ui Front End DeveloperharshvardhiniNoch keine Bewertungen
- Nishi Sharma: AWS Cloud EngineerDokument7 SeitenNishi Sharma: AWS Cloud EngineerKritika ShuklaNoch keine Bewertungen
- The Journeyman Electrician Exam Study Guide: Proven Methods for Successfully Passing the Journeyman Electrician Exam with ConfidenceVon EverandThe Journeyman Electrician Exam Study Guide: Proven Methods for Successfully Passing the Journeyman Electrician Exam with ConfidenceNoch keine Bewertungen
- Multiplexed Networks for Embedded Systems: CAN, LIN, FlexRay, Safe-by-Wire...Von EverandMultiplexed Networks for Embedded Systems: CAN, LIN, FlexRay, Safe-by-Wire...Noch keine Bewertungen
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionVon EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionBewertung: 4.5 von 5 Sternen4.5/5 (543)
- Electrical Engineering 101: Everything You Should Have Learned in School...but Probably Didn'tVon EverandElectrical Engineering 101: Everything You Should Have Learned in School...but Probably Didn'tBewertung: 4.5 von 5 Sternen4.5/5 (27)
- A Mind at Play: How Claude Shannon Invented the Information AgeVon EverandA Mind at Play: How Claude Shannon Invented the Information AgeBewertung: 4 von 5 Sternen4/5 (53)
- Conquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeVon EverandConquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeBewertung: 4.5 von 5 Sternen4.5/5 (10)
- Power System Control and ProtectionVon EverandPower System Control and ProtectionB. Don RussellBewertung: 4 von 5 Sternen4/5 (11)
- 2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersVon Everand2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersBewertung: 5 von 5 Sternen5/5 (1)
- Guide to the IET Wiring Regulations: IET Wiring Regulations (BS 7671:2008 incorporating Amendment No 1:2011)Von EverandGuide to the IET Wiring Regulations: IET Wiring Regulations (BS 7671:2008 incorporating Amendment No 1:2011)Bewertung: 4 von 5 Sternen4/5 (2)
- INCOSE Systems Engineering Handbook: A Guide for System Life Cycle Processes and ActivitiesVon EverandINCOSE Systems Engineering Handbook: A Guide for System Life Cycle Processes and ActivitiesBewertung: 5 von 5 Sternen5/5 (1)
- Practical Electrical Wiring: Residential, Farm, Commercial, and IndustrialVon EverandPractical Electrical Wiring: Residential, Farm, Commercial, and IndustrialBewertung: 3.5 von 5 Sternen3.5/5 (3)
- Programming the Raspberry Pi, Third Edition: Getting Started with PythonVon EverandProgramming the Raspberry Pi, Third Edition: Getting Started with PythonBewertung: 5 von 5 Sternen5/5 (2)
- Hacking Electronics: An Illustrated DIY Guide for Makers and HobbyistsVon EverandHacking Electronics: An Illustrated DIY Guide for Makers and HobbyistsBewertung: 3.5 von 5 Sternen3.5/5 (2)
- Digital Transformation: Survive and Thrive in an Era of Mass ExtinctionVon EverandDigital Transformation: Survive and Thrive in an Era of Mass ExtinctionBewertung: 4.5 von 5 Sternen4.5/5 (9)
- Schaum's Outline of Basic Electricity, Second EditionVon EverandSchaum's Outline of Basic Electricity, Second EditionBewertung: 5 von 5 Sternen5/5 (14)
- Retro Gaming with Raspberry Pi: Nearly 200 Pages of Video Game ProjectsVon EverandRetro Gaming with Raspberry Pi: Nearly 200 Pages of Video Game ProjectsNoch keine Bewertungen
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionVon EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionBewertung: 4 von 5 Sternen4/5 (331)
- Teach Yourself Electricity and Electronics, 6th EditionVon EverandTeach Yourself Electricity and Electronics, 6th EditionBewertung: 3.5 von 5 Sternen3.5/5 (15)
- Build Your Own Electronics WorkshopVon EverandBuild Your Own Electronics WorkshopBewertung: 3.5 von 5 Sternen3.5/5 (3)
- DIY Drones for the Evil Genius: Design, Build, and Customize Your Own DronesVon EverandDIY Drones for the Evil Genius: Design, Build, and Customize Your Own DronesBewertung: 3.5 von 5 Sternen3.5/5 (3)
- Open Radio Access Network (O-RAN) Systems Architecture and DesignVon EverandOpen Radio Access Network (O-RAN) Systems Architecture and DesignNoch keine Bewertungen
- Empires of Light: Edison, Tesla, Westinghouse, and the Race to Electrify the WorldVon EverandEmpires of Light: Edison, Tesla, Westinghouse, and the Race to Electrify the WorldBewertung: 4 von 5 Sternen4/5 (87)