Das könnte Ihnen auch gefallen
- MATLAB ACTIVITY 4 - Determinant Using MATLABDokument9 SeitenMATLAB ACTIVITY 4 - Determinant Using MATLABmaski muzNoch keine Bewertungen
- Laplace Tranformations Formulae PDFDokument1 SeiteLaplace Tranformations Formulae PDFHello World0% (1)
- Module 1Dokument3 SeitenModule 1ricaNoch keine Bewertungen
- Basic Notation Latin CharactersDokument1 SeiteBasic Notation Latin CharactersMuhammad KusairiNoch keine Bewertungen
- Formula Sheet - CSE - 381 PDFDokument2 SeitenFormula Sheet - CSE - 381 PDFYasmine A. SabryNoch keine Bewertungen
- Module in CalculusDokument5 SeitenModule in CalculusIvan gamingNoch keine Bewertungen
- cs260 c1Dokument2 Seitencs260 c1Rushil GholkarNoch keine Bewertungen
- RadiofrecuenciaDokument9 SeitenRadiofrecuenciaSilviTaPinOsNoch keine Bewertungen
- 4.2 Differentiation in Parameters - Part 1Dokument4 Seiten4.2 Differentiation in Parameters - Part 1Jericho CunananNoch keine Bewertungen
- 5-Lecture-Special Functions MAT - M Sc-IVDokument6 Seiten5-Lecture-Special Functions MAT - M Sc-IVMadina GraphicsNoch keine Bewertungen
- Free FireDokument8 SeitenFree FirePs PsNoch keine Bewertungen
- 234-Lectures 1 2Dokument7 Seiten234-Lectures 1 2yazan aNoch keine Bewertungen
- Negative Order Integer Calculus Using Iterative IntegrationDokument5 SeitenNegative Order Integer Calculus Using Iterative IntegrationInije EjiroNoch keine Bewertungen
- Linear First Order PDE: Type 2 Based On Rule II For Solving . .Dokument9 SeitenLinear First Order PDE: Type 2 Based On Rule II For Solving . .Saad Ahmed SazanNoch keine Bewertungen
- Ha 9Dokument5 SeitenHa 9Аружан ЖадырасынNoch keine Bewertungen
- TayvortexDokument23 SeitenTayvortexSpyros DagklisNoch keine Bewertungen
- FALLSEM2019-20 CSE4019 ETH VL2019201000802 Reference Material I 24-Sep-2019 HAAR TRANSFORMDokument3 SeitenFALLSEM2019-20 CSE4019 ETH VL2019201000802 Reference Material I 24-Sep-2019 HAAR TRANSFORMg.divya0612Noch keine Bewertungen
- Linear First Order PDE: Standard FormDokument7 SeitenLinear First Order PDE: Standard FormSaad Ahmed SazanNoch keine Bewertungen
- 2-Lecture-Special Functions MAT - M Sc-IVDokument10 Seiten2-Lecture-Special Functions MAT - M Sc-IVMadina GraphicsNoch keine Bewertungen
- Engineering Analysis - PDFDokument12 SeitenEngineering Analysis - PDFbahast faiqNoch keine Bewertungen
- Capitulo 1 Inferencia Estadistica WebDokument23 SeitenCapitulo 1 Inferencia Estadistica WebRebee GomezNoch keine Bewertungen
- Derivation of The Mean Square DisplacementDokument4 SeitenDerivation of The Mean Square DisplacementSimone MolinaroNoch keine Bewertungen
- Límite Superior Sucesión o SerieDokument4 SeitenLímite Superior Sucesión o SerieDe La Puente FeerNoch keine Bewertungen
- Complex Analysis Spring 2023 HW 7Dokument4 SeitenComplex Analysis Spring 2023 HW 7asampathNoch keine Bewertungen
- Lecture Note 9Dokument14 SeitenLecture Note 9Workineh Asmare KassieNoch keine Bewertungen
- Symbols: Department of Mathematics, Iit KharagpurDokument8 SeitenSymbols: Department of Mathematics, Iit Kharagpurjeremysarfer12Noch keine Bewertungen
- CAT 2 Study Materials MAT 2001 PDFDokument12 SeitenCAT 2 Study Materials MAT 2001 PDFsashidhar avuthuNoch keine Bewertungen
- Fourier SeriesDokument3 SeitenFourier SeriesSuresh KannanNoch keine Bewertungen
- Formula StatistikDokument2 SeitenFormula StatistikIkmal FaizienNoch keine Bewertungen
- File 5eac396f17871Dokument6 SeitenFile 5eac396f17871ajithNoch keine Bewertungen
- Efficiency of LSD Related To RBDDokument4 SeitenEfficiency of LSD Related To RBDSerajum Monira MouriNoch keine Bewertungen
- Lecture13 of Fluid Dynamics Part 3Dokument3 SeitenLecture13 of Fluid Dynamics Part 3Khan SabNoch keine Bewertungen
- 2 - Buckling of Elastic Columns and Frames PDFDokument27 Seiten2 - Buckling of Elastic Columns and Frames PDFณัฐพล บุญสุริยพันธ์Noch keine Bewertungen
- Mid P 2 3Dokument2 SeitenMid P 2 3aem2070Noch keine Bewertungen
- ELEN 3012 April 2022 MCQ (Answer)Dokument4 SeitenELEN 3012 April 2022 MCQ (Answer)Bongani MofokengNoch keine Bewertungen
- Unit-Ii (Part-2)Dokument26 SeitenUnit-Ii (Part-2)M jhansiNoch keine Bewertungen
- Homework 1 Problem 1)Dokument4 SeitenHomework 1 Problem 1)Roberto Valdez PonceNoch keine Bewertungen
- Lecture Note 4Dokument7 SeitenLecture Note 4Workineh Asmare KassieNoch keine Bewertungen
- Chapter 5 Multiple IntegralsDokument33 SeitenChapter 5 Multiple Integrals物理系小薯Noch keine Bewertungen
- Math Lec. 1Dokument8 SeitenMath Lec. 1owronrawan74Noch keine Bewertungen
- Finite Difference Methods For Two-Point Boundary Value Prob-LemsDokument3 SeitenFinite Difference Methods For Two-Point Boundary Value Prob-LemsasasdNoch keine Bewertungen
- CE 2231 NOTES Venturi Nozzle Pitot TubeDokument3 SeitenCE 2231 NOTES Venturi Nozzle Pitot TubeDaryl Adrian ChilaganNoch keine Bewertungen
- MODULE 6 - Linear Equations of The First OrderDokument7 SeitenMODULE 6 - Linear Equations of The First OrderKNARF FRANKNoch keine Bewertungen
- Lecture 1 02 10 2022Dokument8 SeitenLecture 1 02 10 2022owronrawan74Noch keine Bewertungen
- Answers - Online Daily Test 7 - TrockersDokument7 SeitenAnswers - Online Daily Test 7 - TrockersMichael MyamboNoch keine Bewertungen
- For Application of WKB Method of ApproximationDokument4 SeitenFor Application of WKB Method of ApproximationKamal kumar SahooNoch keine Bewertungen
- Unit-2 Vector CalculusDokument86 SeitenUnit-2 Vector CalculusRitesh MukhNoch keine Bewertungen
- 04 LinearModelsDokument28 Seiten04 LinearModelsalokNoch keine Bewertungen
- 焦润一已发表论文1Dokument5 Seiten焦润一已发表论文1Runyi JiaoNoch keine Bewertungen
- Application of Variational Principles in Beams Plates and ShellsDokument13 SeitenApplication of Variational Principles in Beams Plates and ShellspranilNoch keine Bewertungen
- Final Exam-2018Dokument3 SeitenFinal Exam-2018혁준Noch keine Bewertungen
- CalcvarDokument5 SeitenCalcvarKumardeep MukhopadhyayNoch keine Bewertungen
- 8-Lecture-Special Functions MAT - M Sc-IVDokument9 Seiten8-Lecture-Special Functions MAT - M Sc-IVMadina GraphicsNoch keine Bewertungen
- 4-Lecture-Special Functions MAT - M Sc-IVDokument8 Seiten4-Lecture-Special Functions MAT - M Sc-IVMadina GraphicsNoch keine Bewertungen
- 7-Lecture-Special Functions MAT - M Sc-IVDokument6 Seiten7-Lecture-Special Functions MAT - M Sc-IVMadina GraphicsNoch keine Bewertungen
- Tabulated Function: The Error Function Erf (X)Dokument5 SeitenTabulated Function: The Error Function Erf (X)hamzaabdalameerNoch keine Bewertungen
- Partial DerivativesDokument8 SeitenPartial Derivatives01795494168nazmulhasanNoch keine Bewertungen
- EEC325 Chapter 1 1 1Dokument13 SeitenEEC325 Chapter 1 1 1Bashir Abubakar AlkasimNoch keine Bewertungen
- MEE 411 Lecture Notes - Free Damped VibrationsDokument17 SeitenMEE 411 Lecture Notes - Free Damped VibrationsProspect Teaches MathematicsNoch keine Bewertungen
- Penj El Asan Integral Lipat Dua & Penerapan Pada Momen InersiaDokument26 SeitenPenj El Asan Integral Lipat Dua & Penerapan Pada Momen InersiaDevi apNoch keine Bewertungen
- A-level Maths Revision: Cheeky Revision ShortcutsVon EverandA-level Maths Revision: Cheeky Revision ShortcutsBewertung: 3.5 von 5 Sternen3.5/5 (8)
- First Order SystemsDokument158 SeitenFirst Order SystemsGathy BrayohNoch keine Bewertungen
- Fergus Sir 2021 m2 Free Mock (E)Dokument36 SeitenFergus Sir 2021 m2 Free Mock (E)Cheung Tsz ShunNoch keine Bewertungen
- Ge2 Final ExamDokument5 SeitenGe2 Final ExamLeandro Amoranto Bambe100% (1)
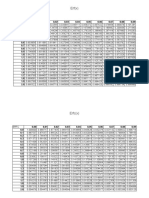
- Erlang B TablesDokument7 SeitenErlang B TablesLorenzo AmorettiNoch keine Bewertungen
- Paintings Probability ProblemDokument2 SeitenPaintings Probability ProblemSashank VarmaNoch keine Bewertungen
- Bending Stress Analysis of Rear Axle of Maruti 800 Car IJERTV1IS6246 PDFDokument4 SeitenBending Stress Analysis of Rear Axle of Maruti 800 Car IJERTV1IS6246 PDFRahul Reddy ChittetiNoch keine Bewertungen
- GATE Syllabus For Electronics and Communication Engineering (ECE) - All About EducationDokument4 SeitenGATE Syllabus For Electronics and Communication Engineering (ECE) - All About EducationSai SarathNoch keine Bewertungen
- Pat3 Math07 PDFDokument3 SeitenPat3 Math07 PDFshelh jonNoch keine Bewertungen
- Mathematics-041 Sample Question Paper 2019-20: Class - XIIDokument4 SeitenMathematics-041 Sample Question Paper 2019-20: Class - XIISaji KuruvillaNoch keine Bewertungen
- Write Each Expression in Radical Form.: Las Week 4Dokument4 SeitenWrite Each Expression in Radical Form.: Las Week 4Aron AbanillaNoch keine Bewertungen
- Kinematics Analysis OF Robots (Part 2) : Eng4406 Robotics and Machine VisionDokument30 SeitenKinematics Analysis OF Robots (Part 2) : Eng4406 Robotics and Machine VisionANSHUMAN KUMARNoch keine Bewertungen
- Projection of PointsDokument42 SeitenProjection of PointsThenarasumohanvelu100% (1)
- Lecture 5Dokument62 SeitenLecture 5Maisam ElkhalafNoch keine Bewertungen
- HW 3.2 Components of A Vector-Problems PDFDokument2 SeitenHW 3.2 Components of A Vector-Problems PDFHemil PatelNoch keine Bewertungen
- S130 Lecture 1-Probability Distribution and Special Discrete PDsDokument61 SeitenS130 Lecture 1-Probability Distribution and Special Discrete PDsMean Median100% (1)
- A Chebyshev Matrix Method For The Spatial Modes ofDokument16 SeitenA Chebyshev Matrix Method For The Spatial Modes ofHiba MansoorNoch keine Bewertungen
- Time Series and Spatial Data Analysis With Scilab: NfoclearinghouseDokument63 SeitenTime Series and Spatial Data Analysis With Scilab: NfoclearinghouseAnonymous xpxooiNoch keine Bewertungen
- (Lecture Notes in Physics 726) D. Husemöller, M. Joachim, B. Jurčo, M. Schottenloher (auth.)-Basic Bundle Theory and K-Cohomology Invariants_ With contributions by Siegfried Echterhoff, Stefan Fredenh hoy.pdfDokument356 Seiten(Lecture Notes in Physics 726) D. Husemöller, M. Joachim, B. Jurčo, M. Schottenloher (auth.)-Basic Bundle Theory and K-Cohomology Invariants_ With contributions by Siegfried Echterhoff, Stefan Fredenh hoy.pdfSixta Vivanco100% (2)
- Analytic Pricing of Exotic Discrete Variance Swaps and OptionsDokument55 SeitenAnalytic Pricing of Exotic Discrete Variance Swaps and OptionsGaurav VermaNoch keine Bewertungen
- Activity#5-Fourier Series and Fourier TransformDokument3 SeitenActivity#5-Fourier Series and Fourier TransformAdrianne BastasaNoch keine Bewertungen
- Problems and Theorems in Analysis, by G. Pólya and G. Szegö, Die GrundlehDokument10 SeitenProblems and Theorems in Analysis, by G. Pólya and G. Szegö, Die GrundlehTamás TornyiNoch keine Bewertungen
- SCE52001 Advanced Engineering Mathematics Notes 3Dokument1 SeiteSCE52001 Advanced Engineering Mathematics Notes 3Alexander AlexanderNoch keine Bewertungen
- Limits, Continuity and Differentiability Assignment - 3: Tan LimDokument5 SeitenLimits, Continuity and Differentiability Assignment - 3: Tan LimSai GokulNoch keine Bewertungen
- Tangent and Secant SegmentsDokument25 SeitenTangent and Secant SegmentsrainNoch keine Bewertungen
- MATLAB Workbook: Vector Calculus For EngineersDokument33 SeitenMATLAB Workbook: Vector Calculus For EngineersChengineNoch keine Bewertungen
- Disi PationDokument23 SeitenDisi PationYonymMillaNoch keine Bewertungen
- Revision Practice Questions SheetDokument3 SeitenRevision Practice Questions SheetcharanNoch keine Bewertungen
- Course Outline MAT120 Sec3 Spring 2023 076Dokument5 SeitenCourse Outline MAT120 Sec3 Spring 2023 076Rayed RiasatNoch keine Bewertungen