Beruflich Dokumente
Kultur Dokumente
Ni Motion 191 208.en - Es
Hochgeladen von
Bernardino Melgarejo LugoOriginaltitel
Copyright
Verfügbare Formate
Dieses Dokument teilen
Dokument teilen oder einbetten
Stufen Sie dieses Dokument als nützlich ein?
Sind diese Inhalte unangemessen?
Dieses Dokument meldenCopyright:
Verfügbare Formate
Ni Motion 191 208.en - Es
Hochgeladen von
Bernardino Melgarejo LugoCopyright:
Verfügbare Formate
torque control
13
Para mantener la torsión o la fuerza constante, el sensor que devuelve la realimentación al controlador de
movimiento debe devolver un valor proporcional a la torsión o la fuerza. El controlador de movimiento opera
sistemas de control de posición de par-control y de la misma manera. La diferencia principal es que la
realimentación en los sistemas de control de posición devuelve la posición actual, mientras que la
realimentación en los sistemas de control de torque devuelve una tensión proporcional a la fuerza o par de
torsión actual.
Se puede aplicar la fuerza de respuesta en los controladores de movimiento de NI utilizando ya sea analógica o
retroalimentación mediante el control de la fuerza.
Nota El controlador NI SoftMotion no es compatible con realimentación analógica.
Comentarios analógico
En este modo, el sensor de par o de fuerza está conectado a una de las entradas analógicas en el controlador
de movimiento NI. Ese canal analógico se utiliza como el sensor de retroalimentación.
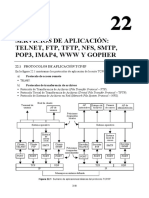
Figura 13-1. Torque Control mediante realimentación Diagrama de flujo analógico
© National Instruments Corporation 13-1 Manual del usuario NI-Motion
capítulo 13 torque control
Ajuste del bucle de control con un sensor de fuerza, que es un sensor de retroalimentación analógica, produce los mismos
resultados que con un sensor de realimentación de posición. Dependiendo de la resolución que está utilizando, el sistema
puede requerir mayores ganancias para asegurar una respuesta más rápida. controladores de movimiento de NI tienen 12
bits o de 16 bits entradas analógicas, cuyas áreas de distribución se puede ajustar entre 0 V a 5 V, -5 V a
+ 5 V, 0 V a 10 V, y -10 V a 10 V. Cuando se utiliza el recuento para la introducción de los valores de
posición, velocidad, aceleración y deceleración, que no es necesario para introducir el valor cuentas /
revolución para el eje .
Consulte el manual de usuario del controlador de movimiento para obtener información sobre rangos de entrada
analógicas.
Manual del usuario NI-Motion 13-2 ni.com
capítulo 13 torque control
Torque Control mediante realimentación algoritmo analógico
constante
mantener un par de torsión o fuerza
posición
principal de destino
para de carga
el eje que en términos de
es para
voltios. Si desea mantener 5 V, carga de 2047
conteos. Esto se aplica a un rango de ± 5 V
analógica como realimentación
por ADC del canal y ADC de 12 bits
voltios en el mapa los sensor
máxima, y la deceleración max en
modo de carga absolutos:
velocidad max, la aceleración
de operación
Establecer limitaciones a mover
iniciar el movimiento
Bucle de espera de movimiento completa
Actualización
(Opcional) Ajustar modo
posición de destino (opcional)
Iniciar el movimiento
Figura 13-2. Torque Control mediante realimentación algoritmo analógico
© National Instruments Corporation 13-3 Manual del usuario NI-Motion
capítulo 13 torque control
Código de LabVIEW
21 3 4 5 6 7 8
1 Cargar Velocity 4 Ajuste del modo de funcionamiento de 7 Lea por Estado del eje 8 Propuesta
2 de carga de aceleración / deceleración 3 de carga 5 6 Posición objetivo de inicio de controlador de errores
carga de aceleración / deceleración movimiento
La Figura 13-3. Torque Control mediante realimentación analógica utilizando LabVIEW
Manual del usuario NI-Motion 13-4 ni.com
capítulo 13 torque control
C / C ++ Code
El siguiente código de ejemplo no es necesariamente completa, y no puede compilar si se copia
exactamente. Referirse a ejemplos carpeta en el CD NI-Motion para los archivos que estén
fabricados y compilan como es.
// Función principal void
main (void) {
U8 BoardID; // número de identificación Junta
U8 eje;// número de eje
u16 csr = 0; // registro de estado de la comunicación
u16 AXISSTATUS; // estado del eje
u16 MoveComplete; // Variables para el tratamiento de
errores modal
u16 CommandID; // El CommandID de la función
u16 de resourceID; // El ID de recurso
i32 código de error;// Código de error
/////////////////////////////// // Establecer el identificador de
tablero
BoardID = 1; // Establecer el número
de eje
eje = NIMC_AXIS1;
////////////////////////////////
// ------------------------------------------------ // Se se supone que el eje se mueva tiene un
canal ADC mapeada // como su retroalimentación primaria. Posición se trata como
voltios binarios. // Por lo tanto la velocidad se carga en binario voltios / seg y la
aceleración como // voltios binarios / seg ^ 2.
// ------------------------------------------------ // Establecer la velocidad para el movimiento
(en binario voltios / sec)
err = flex_load_velocity ( BoardID, eje, 10000, 0xFF); CheckError; // Establecer
la aceleración para el movimiento (en voltios binarios / sec ^ 2)
err = flex_load_acceleration ( BoardID, eje, NIMC_ACCELERATION, 100000,
0xFF); CheckError; // Establecer la desaceleración para el movimiento (en
voltios binarios / sec ^ 2)
© National Instruments Corporation 13-5 Manual del usuario NI-Motion
capítulo 13 torque control
err = flex_load_acceleration ( BoardID, eje, NIMC_DECELERATION, 100000,
0xFF); CheckError; // Establecer el tirón - tiempo de s-curva (en períodos de
muestra)
err = flex_load_scurve_time ( BoardID, eje, 1000, 0xFF); CheckError; // Ajuste el
modo de operación
err = flex_set_op_mode ( BoardID, eje, NIMC_ABSOLUTE_POSITION); CheckError; // Posición
de carga correspondiente a la tensión que se desea que el motor para mantener //
(2047 ~ 5 V en este ejemplo)
err = (flex_load_target_pos BoardID, eje, 2047, 0xFF); CheckError; // Iniciar el
movimiento
err = flex_start ( BoardID, eje, 0); CheckError;
hacer
{
AXISSTATUS = 0; // Comprobar el estado de movimiento
completo
err = flex_check_move_complete_status ( BoardID, eje, 0, y MoveComplete);
CheckError; // Compruebe el error / eje arrastrado fuera de estado para el eje 1
err = flex_read_axis_status_rtn ( BoardID, eje, y AXISSTATUS); CheckError; // Leer
el registro de estado de la comunicación y comprobar el modal // errores
err = flex_read_csr_rtn ( BoardID, y RSE); CheckError; // Comprobar
los errores modales
Si ( RSE y NIMC_MODAL_ERROR_MSG) {
err = CSR y NIMC_MODAL_ERROR_MSG; CheckError;
Manual del usuario NI-Motion 13-6 ni.com
capítulo 13 torque control
}} mientras (! ! MoveComplete && (AXISSTATUS y
NIMC_FOLLOWING_ERROR_BIT) && (AXISSTATUS y NIMC_AXIS_OFF_BIT)!);
// Salir en la jugada completa / siguiente error / fuera del eje
regreso;// Salir de la aplicación
////////////////////////////////////////////////// / // Manejo de errores
//
nimcHandleError; // NIMCCATCHTHIS:
// Comprobar para ver si hubo algún error modales
Si ( RSE y NIMC_MODAL_ERROR_MSG) {
hacer{
// Obtener el identificador de comando, identificador de recursos, y
el código de error de la // error modal de la pila de error en el
dispositivo
flex_read_error_msg_rtn ( BoardID, y commandI
D, y de resourceID, y errorCode); nimcDisplayError (errorCode,
CommandID, res ourceID); // Leer el registro de estado de la
comunicación
flex_read_csr_rtn ( BoardID, y RSE); } mientras( RSE y
NIMC_MODAL_ERROR_MSG); }
más// Muestra el error habitual
nimcDisplayError (err, 0,0);
regreso;// Salir de la aplicación
}
© National Instruments Corporation 13-7 Manual del usuario NI-Motion
capítulo 13 torque control
Fuerza de monitoreo
Puede utilizar este segundo modo de retroalimentación de fuerza si tiene un sensor de posición del motor,
además del sensor de par. El bucle de control en el controlador de movimiento cierra la posición y bucles
como de costumbre velocidad. MAX utilizar para mapear el codificador como el dispositivo de captación del
eje.
La Figura 13-4. Torque Control mediante realimentación Diagrama de flujo analógico
Para el seguimiento de la fuerza, crear un bucle exterior para controlar el sensor de par, y mover el
motor basado en el valor leído del sensor de par.
Manual del usuario NI-Motion 13-8 ni.com
capítulo 13 torque control
Control de par utilizando un monitor de fuerza Algoritmo
que es
para mantener una constante
torsión o la fuerza
realimentación principal para el eje
sensor de posición
restricciones (encoder)
de carga se mueven: como
velocidad max, la
aceleración máxima, y max
deceleración Mapa el
Configurar el modo de operación
Ajuste de modo relativo
Loop leer el canal analógico que está conectado
al sensor de fuerza o par
Leer sensor analógico
Cotejar con el
valor requerido
Actualización
(Opcional)
posición de destino (opcional)
Iniciar el movimiento
Figura 13-5. Control de par utilizando un monitor de fuerza Algoritmo
© National Instruments Corporation 13-9 Manual del usuario NI-Motion
capítulo 13 torque control
Código de LabVIEW
1 2 3 4 5 76 8 9
1 Cargar Velocity 4 Ajuste Modo de operación 5 Leer 7 Puesta en Movimiento 8 Lea por Estado
2 de carga de aceleración / deceleración 3 de ADC 6 Carga de posición de del eje 9 de movimiento controlador de
carga de aceleración / deceleración destino errores
La Figura 13-6. Control de par utilizando fuerza de vigilancia en LabVIEW
Manual del usuario NI-Motion 13-10 ni.com
capítulo 13 torque control
C / C ++ Code
El siguiente código de ejemplo no es necesariamente completa, y no puede compilar si se copia
exactamente. Referirse a ejemplos carpeta en el CD NI-Motion para los archivos que estén
fabricados y compilan como es.
// Función principal
void main (void) {
U8 BoardID; // número de identificación Junta
U8 eje;// número de ejes
u16 csr = 0; // registro de estado de la comunicación
u16 AXISSTATUS; // estado del eje
i32 constante;// fuerza constante
i16 adcValue; // valor ADC leer
// Variables para el tratamiento de errores modal
u16 CommandID; // El CommandID de la función
u16 de resourceID; // El ID de recurso
i32 código de error;// Código de error
/////////////////////////////// // Establecer el identificador
de tablero
BoardID = 1; // Establecer el número
de eje
eje = NIMC_AXIS1; // fuerza constante necesaria para mantenerse
// corresponde a 5V +/- 5 V durante la configuración del ADC
= Constante de 2047;
////////////////////////////////
// ------------------------------------------------ // Se se supone que el eje se mueva tiene
asignada un codificador como // su retroalimentación primaria
// ------------------------------------------------ // Establecer la velocidad para el movimiento
(en cuentas / seg)
err = flex_load_velocity ( BoardID, eje, 10000, 0xFF); CheckError; // Establecer
la aceleración para el movimiento (en cuentas / s ^ 2)
err = flex_load_acceleration ( BoardID, eje, NIMC_ACCELERATION,
100000, 0xFF); CheckError; // Establecer la desaceleración para el
movimiento (en cuentas / s ^ 2)
© National Instruments Corporation 13-11 Manual del usuario NI-Motion
capítulo 13 torque control
err = flex_load_acceleration ( BoardID, eje, NIMC_DECELERATION, 100000,
0xFF); CheckError; // Establecer el tirón (valor de s-curva) para el traslado (en
períodos de muestra)
err = flex_load_scurve_time ( BoardID, eje, 100, 0xFF); CheckError; // Ajuste el
modo de funcionamiento a la velocidad
err = flex_set_op_mode ( BoardID, eje,
NIMC_RELATIVE_POSITION); CheckError;
hacer
{
// Leer el número de canal ADC 1 y calcular la posición de //estar actualizado
err = flex_read_adc16_rtn ( BoardID, NIMC_ADC1, y adcValue); CheckError;
Si( ( constante - adcValue) = 0) {
err = (flex_load_target_pos BoardID, eje, (constante - adcValue),
0xFF); CheckError; // Mover sobre la base de la fuerza de delta
err = flex_start ( BoardID, eje, 0); CheckError; } // Controlar el
movimiento completo del estado / error de seguimiento / fuera del
eje // estado
err = flex_read_axis_status_rtn ( BoardID, eje, y AXISSTATUS); CheckError; // Leer
el registro de estado de la comunicación y comprobar el modal // errores
err = flex_read_csr_rtn ( BoardID, y RSE); CheckError; // Comprobar
los errores modales
Si ( RSE y NIMC_MODAL_ERROR_MSG) {
err = CSR y NIMC_MODAL_ERROR_MSG; CheckError;
Manual del usuario NI-Motion 13-12 ni.com
capítulo 13 torque control
Sleep (50); // Compruebe cada 50 ms
} mientras (!( AXISSTATUS y NIMC_AXIS_OFF_BIT)); // Salir en fuera de eje
regreso;// Salir de la aplicación
////////////////////////////////////////////////// / // Manejo de errores
//
nimcHandleError; // NIMCCATCHTHIS:
// Comprobar para ver si hubo algún error modales
Si ( RSE y NIMC_MODAL_ERROR_MSG) {
hacer{
// Obtener el identificador de comando, identificador de recursos, y
el código de error de la // error modal de la pila de error en el
dispositivo
flex_read_error_msg_rtn ( BoardID, y commandI
D, y de resourceID, y errorCode); nimcDisplayError (errorCode,
CommandID, res ourceID); // Leer el registro de estado de la
comunicación
flex_read_csr_rtn ( BoardID, y RSE); } mientras( RSE y
NIMC_MODAL_ERROR_MSG); }
más// Muestra el error habitual
nimcDisplayError (err, 0,0);
regreso;// Salir de la aplicación
}
© National Instruments Corporation 13-13 Manual del usuario NI-Motion
capítulo 13 torque control
Control de velocidad basado en el valor analógico
En un sistema donde un rodillo de alimentación debe funcionar a velocidades en base a una tensión de entrada,
el algoritmo para mantener la velocidad consiste en leer el voltaje analógico conectado a uno de los canales
analógicos en el controlador de movimiento, y la actualización de la velocidad del eje basado en el valor de la
tensión de leer. En este sistema, la regeneración es un sensor de posición normal, tal como un codificador.
Control de velocidad basado en la retroalimentación algoritmo analógico
movimiento de carga de entrada analógicas
Configurar el modo de operación
Ajuste a modo de velocidad
iniciar el movimiento
espera de movimiento completa
Lea las restricciones de
Calcule nueva velocidad basado en
la entrada analógica
Cargar nuevo lazo de velocidad a la
Figura 13-7. Control de velocidad basado en la retroalimentación algoritmo analógico
La entrada analógica podría estar conectado a un sensor de fuerza, que asegura que la tensión de una
banda que se alimenta se mantiene.
Manual del usuario NI-Motion 13-14 ni.com
capítulo 13 torque control
Código de LabVIEW
1 2 3 4 5 876 9 10
1 Cargar Velocity 5 Puesta en Movimiento 6 8 Inicio de movimiento 9 Lea por Estado
2 de carga de aceleración / deceleración 3 de Leer ADC 7 Carga de del eje 10 Propuesta controlador de
carga de aceleración / deceleración 4 Set Modo velocidad errores
de operación
La Figura 13-8. Control de velocidad basado en la retroalimentación analógica utilizando LabVIEW
© National Instruments Corporation 13-15 Manual del usuario NI-Motion
capítulo 13 torque control
C / C ++ Code
El siguiente código de ejemplo no es necesariamente completa, y no puede compilar si se copia
exactamente. Referirse a ejemplos carpeta en el CD NI-Motion para los archivos que estén
fabricados y compilan como es.
// Función principal
void main (void) {
U8 BoardID; // número de identificación Junta
U8 eje;// número de ejes
u16 csr = 0; // registro de estado de la comunicación
u16 AXISSTATUS; // estado del eje
i32 constante;// multiplicador constante
i16 adcValue; // valor ADC leer
// Variables para el tratamiento de errores modal
u16 CommandID; // El CommandID de la función
u16 de resourceID; // El ID de recurso
i32 código de error;// Código de error
/////////////////////////////// // Establecer el identificador
de tablero
BoardID = 1; // Establecer el número
de eje
eje = NIMC_AXIS1; // constante para multiplicar el valor ADC leer para
calcular la velocidad requerida //
= Constante de 10;
//////////////////////////////// // Establecer la velocidad para el movimiento (en
cuentas / seg)
err = flex_load_velocity ( BoardID, eje, 10000, 0xFF); CheckError; // Establecer
la aceleración para el movimiento (en cuentas / s ^ 2)
err = flex_load_acceleration ( BoardID, eje, NIMC_ACCELERATION,
100000, 0xFF); CheckError; // Establecer la desaceleración para el
movimiento (en cuentas / s ^ 2)
err = flex_load_acceleration ( BoardID, eje, NIMC_DECELERATION,
100000, 0xFF); CheckError;
Manual del usuario NI-Motion 13-16 ni.com
capítulo 13 torque control
// Establecer el tirón (valor de s-curva) para el traslado (en períodos de
muestra)
err = flex_load_scurve_time ( BoardID, eje, 100, 0xFF); CheckError; // Ajuste el
modo de funcionamiento a la velocidad
err = flex_set_op_mode ( BoardID, eje, NIMC_VELOCITY);
CheckError; // Iniciar el movimiento
err = flex_start ( BoardID, eje, 0); CheckError;
hacer
{
// Leer el número de canal ADC 1 y calcular la velocidad de //estar actualizado
err = flex_read_adc16_rtn ( BoardID, NIMC_ADC1, y adcValue); CheckError; // Establecer
la velocidad en función del valor ADC leer
err = flex_load_velocity ( BoardID, eje, (adcValue
* constante), 0xFF); CheckError; // Actualización
de la velocidad
err = flex_start ( BoardID, eje, 0); CheckError; // Controlar el movimiento
completo del estado / error de seguimiento / fuera del eje // estado
err = flex_read_axis_status_rtn ( BoardID, eje, y AXISSTATUS); CheckError; // Leer
el registro de estado de la comunicación y comprobar el modal // errores
err = flex_read_csr_rtn ( BoardID, y RSE); CheckError; // Comprobar
los errores modales
Si ( RSE y NIMC_MODAL_ERROR_MSG) {
err = CSR y NIMC_MODAL_ERROR_MSG; CheckError; }
© National Instruments Corporation 13-17 Manual del usuario NI-Motion
capítulo 13 torque control
Sleep (50); // Compruebe cada 50 ms
} mientras (!( AXISSTATUS y NIMC_AXIS_OFF_BIT)); // Salir en fuera de eje
regreso;// Salir de la aplicación
////////////////////////////////////////////////// / // Manejo de errores
//
nimcHandleError; // NIMCCATCHTHIS:
// Comprobar para ver si hubo algún error modales
Si ( RSE y NIMC_MODAL_ERROR_MSG) {
hacer{
// Obtener el identificador de comando, identificador de recursos, y
el código de error de la // error modal de la pila de error en el
dispositivo
flex_read_error_msg_rtn ( BoardID, y commandI
D, y de resourceID, y errorCode); nimcDisplayError (errorCode,
CommandID, res ourceID); // Leer el registro de estado de la
comunicación
flex_read_csr_rtn ( BoardID, y RSE); } mientras( RSE y
NIMC_MODAL_ERROR_MSG); }
más// Muestra el error habitual
nimcDisplayError (err, 0,0);
regreso;// Salir de la aplicación
}
Manual del usuario NI-Motion 13-18 ni.com
Das könnte Ihnen auch gefallen
- ReporteDokument39 SeitenReporteBernardino Melgarejo LugoNoch keine Bewertungen
- Manual VisiDokument39 SeitenManual VisiBernardino Melgarejo LugoNoch keine Bewertungen
- Transformación Digital 4.0Dokument76 SeitenTransformación Digital 4.0Bernardino Melgarejo Lugo100% (1)
- Programa General CONAMTI 2018Dokument1 SeitePrograma General CONAMTI 2018Bernardino Melgarejo LugoNoch keine Bewertungen
- FiestasDokument2 SeitenFiestasBernardino Melgarejo LugoNoch keine Bewertungen
- El Dia Que Te ConociDokument1 SeiteEl Dia Que Te ConociBernardino Melgarejo LugoNoch keine Bewertungen
- CE4.1 Guarda Archivos en Formatos DiferentesDokument8 SeitenCE4.1 Guarda Archivos en Formatos DiferentesGabriela Michel Capellan GutierrezNoch keine Bewertungen
- Guia de NodDokument3 SeitenGuia de NodDario Ezequiel Martinez MoryNoch keine Bewertungen
- Comandos de Linux y Windows para Administrar ArchivosDokument11 SeitenComandos de Linux y Windows para Administrar ArchivosAndrés Felipe Murillo MorenoNoch keine Bewertungen
- 12.2.1.5 SergioRaulAparicioDokument12 Seiten12.2.1.5 SergioRaulAparicioRaúl MuñozNoch keine Bewertungen
- Manual de Procedimientos de Prevencion de RiesgosDokument28 SeitenManual de Procedimientos de Prevencion de RiesgosOsvaldo CollinsNoch keine Bewertungen
- Comandos Windows y LinuxDokument23 SeitenComandos Windows y LinuxEsmeralda CastilloNoch keine Bewertungen
- Informe InvestigacionDokument5 SeitenInforme InvestigacionJUAN CARLOS VALDIVIA BERRIOSNoch keine Bewertungen
- Manual Tabñet Es7510 - tf600t - Emanual PDFDokument76 SeitenManual Tabñet Es7510 - tf600t - Emanual PDFrichardNoch keine Bewertungen
- Tecnologia Del Computador 2017Dokument10 SeitenTecnologia Del Computador 2017stiven miguelNoch keine Bewertungen
- ¿Como Hacer Un Juego de Plataforma? (Principiante) (GDevelop Wiki)Dokument46 Seiten¿Como Hacer Un Juego de Plataforma? (Principiante) (GDevelop Wiki)chinito9910 molando100% (1)
- Guia Novatos DreamboxDokument12 SeitenGuia Novatos DreamboxFelix RedondoNoch keine Bewertungen
- Informe FinalDokument8 SeitenInforme FinalSussan ContrerasNoch keine Bewertungen
- Sesion02 Apache SqoopDokument23 SeitenSesion02 Apache Sqoopravi mijhail quispe acevedoNoch keine Bewertungen
- Implementacion de Politicas de Seguridad en Equipos de ComputoDokument9 SeitenImplementacion de Politicas de Seguridad en Equipos de ComputoalbertoNoch keine Bewertungen
- Manual de Usuario DIMM FormulariosDokument15 SeitenManual de Usuario DIMM FormulariosPablo Andrés Paredes33% (3)
- Redes Cap22 PDFDokument20 SeitenRedes Cap22 PDFfoconuNoch keine Bewertungen
- 4.3.5 Sistematización de Información.Dokument9 Seiten4.3.5 Sistematización de Información.Mayron MedinaNoch keine Bewertungen
- ComputacionI Tema17Dokument12 SeitenComputacionI Tema17KARLA LORENA NAZARIO ZORRILLANoch keine Bewertungen
- Historia de Copacabana y de La MilagrosaDokument340 SeitenHistoria de Copacabana y de La MilagrosaEduardo InvernizziNoch keine Bewertungen
- Transferencia Documental - MMMDokument18 SeitenTransferencia Documental - MMMMARIA ELVIRA VARGAS RANGELNoch keine Bewertungen
- Practica 2 - Parte 2 - Microsoft Word - 5 PuntosDokument7 SeitenPractica 2 - Parte 2 - Microsoft Word - 5 Puntosestacion petromovil0% (1)
- DSP - Diseño de Filtros Digitales Con Fdatool PDFDokument27 SeitenDSP - Diseño de Filtros Digitales Con Fdatool PDFArmando CajahuaringaNoch keine Bewertungen
- 1.2 Sistemas de Procesamiento de ArchivosDokument4 Seiten1.2 Sistemas de Procesamiento de ArchivosmiguelNoch keine Bewertungen
- Léame de Adobe Photoshop CS3Dokument9 SeitenLéame de Adobe Photoshop CS3tonyraqueNoch keine Bewertungen
- KST WorkVisual EsDokument169 SeitenKST WorkVisual EsEberPerez100% (2)
- Curso Excel 2 (Linkedin)Dokument24 SeitenCurso Excel 2 (Linkedin)Sayris BarrsalsNoch keine Bewertungen
- Manual Curso LATEXDokument158 SeitenManual Curso LATEXRaul Del Castillo PerezNoch keine Bewertungen
- 1-Instructivo para Crear y Organizar El Portafolio Del Aprendiz en Google Drive - v1Dokument6 Seiten1-Instructivo para Crear y Organizar El Portafolio Del Aprendiz en Google Drive - v1Camilo MoralesNoch keine Bewertungen
- Tutorial Artlantis en Espa OlDokument27 SeitenTutorial Artlantis en Espa OlCesar Aguilar100% (1)
- Programas de Utilidad de Servidor de Bases de Datos PDFDokument4 SeitenProgramas de Utilidad de Servidor de Bases de Datos PDFraagcomoNoch keine Bewertungen