Das könnte Ihnen auch gefallen
- Paper 1Dokument40 SeitenPaper 1Ashweg SamantNoch keine Bewertungen
- Paper 1Dokument40 SeitenPaper 1Ashweg SamantNoch keine Bewertungen
- Pic 18f 4520Dokument391 SeitenPic 18f 4520Jatin ChotaliyaNoch keine Bewertungen
- SD CardDokument9 SeitenSD CardAshweg SamantNoch keine Bewertungen
- 1Dokument20 Seiten1Ashweg SamantNoch keine Bewertungen
- Subject: Data Structures & Algorithms: P.C.C.O.E.PUNE-44Dokument3 SeitenSubject: Data Structures & Algorithms: P.C.C.O.E.PUNE-44Ashweg SamantNoch keine Bewertungen
- Datasheet 74ls83 PDFDokument3 SeitenDatasheet 74ls83 PDFLioni Dávila AguilarNoch keine Bewertungen
- Electronics (S.E.) Syllabus NewDokument52 SeitenElectronics (S.E.) Syllabus NewNoor'Ali KhojaNoch keine Bewertungen
- Green Building Facts $!26 FiguresDokument4 SeitenGreen Building Facts $!26 FiguresAshweg SamantNoch keine Bewertungen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Bug Life Cycle in Software TestingDokument2 SeitenBug Life Cycle in Software TestingDhirajNoch keine Bewertungen
- PLASSON UK July 2022 Price Catalogue v1Dokument74 SeitenPLASSON UK July 2022 Price Catalogue v1Jonathan Ninapaytan SanchezNoch keine Bewertungen
- Power - Factor - Correction - LegrandDokument24 SeitenPower - Factor - Correction - LegrandrehanNoch keine Bewertungen
- Graduate Macro Theory II: The Real Business Cycle Model: Eric Sims University of Notre Dame Spring 2017Dokument25 SeitenGraduate Macro Theory II: The Real Business Cycle Model: Eric Sims University of Notre Dame Spring 2017Joab Dan Valdivia CoriaNoch keine Bewertungen
- Methods of Estimation For Building WorksDokument22 SeitenMethods of Estimation For Building Worksvara prasadNoch keine Bewertungen
- Marketing Plan Outline-Fall 23Dokument6 SeitenMarketing Plan Outline-Fall 23arbelsb3Noch keine Bewertungen
- Technical Test 03Dokument13 SeitenTechnical Test 03KartikNoch keine Bewertungen
- Zoom g2 1nu Manual Do Utilizador PDFDokument56 SeitenZoom g2 1nu Manual Do Utilizador PDFEliude Gonçalves FerreiraNoch keine Bewertungen
- Business Logic Module 1Dokument5 SeitenBusiness Logic Module 1Cassandra VenecarioNoch keine Bewertungen
- Validación Española ADHD-RSDokument7 SeitenValidación Española ADHD-RSCristina Andreu NicuesaNoch keine Bewertungen
- Florida Motor Fuel Tax Relief Act of 2022Dokument9 SeitenFlorida Motor Fuel Tax Relief Act of 2022ABC Action NewsNoch keine Bewertungen
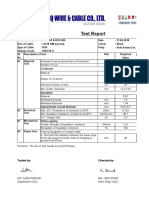
- Test Report: Tested By-Checked byDokument12 SeitenTest Report: Tested By-Checked byjamilNoch keine Bewertungen
- Lic Nach MandateDokument1 SeiteLic Nach Mandatefibiro9231Noch keine Bewertungen
- Quemador BrahmaDokument4 SeitenQuemador BrahmaClaudio VerdeNoch keine Bewertungen
- BC 672772 RBRS Service TraningDokument385 SeitenBC 672772 RBRS Service TraningTeknik Makina100% (2)
- Tutorial: MSBA7003 Quantitative Analysis MethodsDokument29 SeitenTutorial: MSBA7003 Quantitative Analysis MethodsAmanda WangNoch keine Bewertungen
- Online Dynamic Security Assessment of Wind Integrated Power System UsingDokument9 SeitenOnline Dynamic Security Assessment of Wind Integrated Power System UsingRizwan Ul HassanNoch keine Bewertungen
- Rules and Fallacies For Categorical SyllogismsDokument5 SeitenRules and Fallacies For Categorical SyllogismsFatima Ismael PortacioNoch keine Bewertungen
- Retirement 01Dokument2 SeitenRetirement 01Nonema Casera JuarezNoch keine Bewertungen
- FoundationDokument98 SeitenFoundationManognya KotaNoch keine Bewertungen
- Formula Renault20 Mod00Dokument68 SeitenFormula Renault20 Mod00Scuderia MalatestaNoch keine Bewertungen
- 1974 - Roncaglia - The Reduction of Complex LabourDokument12 Seiten1974 - Roncaglia - The Reduction of Complex LabourRichardNoch keine Bewertungen
- Chapter 2 Axial and Torsional ElementsDokument57 SeitenChapter 2 Axial and Torsional ElementsAhmad FaidhiNoch keine Bewertungen
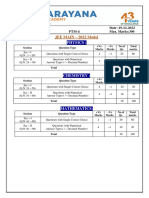
- Xii - STD - Iit - B1 - QP (19-12-2022) - 221221 - 102558Dokument13 SeitenXii - STD - Iit - B1 - QP (19-12-2022) - 221221 - 102558Stephen SatwikNoch keine Bewertungen
- ITP - Plaster WorkDokument1 SeiteITP - Plaster Workmahmoud ghanemNoch keine Bewertungen
- Cultural Practices of India Which Is Adopted by ScienceDokument2 SeitenCultural Practices of India Which Is Adopted by ScienceLevina Mary binuNoch keine Bewertungen
- Effect of IctDokument10 SeitenEffect of IctRVID PhNoch keine Bewertungen
- Each Life Raft Must Contain A Few ItemsDokument2 SeitenEach Life Raft Must Contain A Few ItemsMar SundayNoch keine Bewertungen
- 09-11-2016 University Exam PaperDokument34 Seiten09-11-2016 University Exam PaperSirisha AsadiNoch keine Bewertungen
- Report Painter GR55Dokument17 SeitenReport Painter GR55Islam EldeebNoch keine Bewertungen