Das könnte Ihnen auch gefallen
- US Digital E7PDokument10 SeitenUS Digital E7PArleth TrejoNoch keine Bewertungen
- Miniature Optical Shaft Encoder Technical SpecificationsDokument5 SeitenMiniature Optical Shaft Encoder Technical SpecificationshysamNoch keine Bewertungen
- Semiconductor Data Book: Characteristics of approx. 10,000 Transistors, FETs, UJTs, Diodes, Rectifiers, Optical Semiconductors, Triacs and SCRsVon EverandSemiconductor Data Book: Characteristics of approx. 10,000 Transistors, FETs, UJTs, Diodes, Rectifiers, Optical Semiconductors, Triacs and SCRsNoch keine Bewertungen
- Planetary gearhead GPX 26, DC motor DCX 22, encoder ENX 16Dokument4 SeitenPlanetary gearhead GPX 26, DC motor DCX 22, encoder ENX 16terRer91Noch keine Bewertungen
- Maxon EC60 400wattDokument1 SeiteMaxon EC60 400wattElectromateNoch keine Bewertungen
- Newnes Electronics Circuits Pocket Book (Linear IC): Newnes Electronics Circuits Pocket Book, Volume 1Von EverandNewnes Electronics Circuits Pocket Book (Linear IC): Newnes Electronics Circuits Pocket Book, Volume 1Bewertung: 4.5 von 5 Sternen4.5/5 (3)
- GMP 1 0Dokument4 SeitenGMP 1 0rasoolNoch keine Bewertungen
- Data Sheet For Precision Potentiometer: Singleturn Wirewound Potentiometer Series RPS50Dokument5 SeitenData Sheet For Precision Potentiometer: Singleturn Wirewound Potentiometer Series RPS50Vasile DumitruNoch keine Bewertungen
- Baumer Tdp02 Tdpz02 Ds enDokument4 SeitenBaumer Tdp02 Tdpz02 Ds enQamar ZiaNoch keine Bewertungen
- Modelagem Motor e RedutorDokument3 SeitenModelagem Motor e RedutorFabrício NettoNoch keine Bewertungen
- 6FX2001-5FS12_datasheet_enDokument2 Seiten6FX2001-5FS12_datasheet_enfamiliatucsonNoch keine Bewertungen
- 6FX2001-5FS12 Datasheet enDokument2 Seiten6FX2001-5FS12 Datasheet enjosé ángel hernández ortizNoch keine Bewertungen
- Amt10X Description: Modular Encoder: SeriesDokument8 SeitenAmt10X Description: Modular Encoder: SerieshelveciotfNoch keine Bewertungen
- Data Sheet For Precision Potentiometer: Multiturn Wirewound Potentiometer Series AL17/19Dokument6 SeitenData Sheet For Precision Potentiometer: Multiturn Wirewound Potentiometer Series AL17/19Danna PerezNoch keine Bewertungen
- Data Sheet For Precision Potentiometer: Multiturn Wirewound Potentiometer Series AL17/19Dokument6 SeitenData Sheet For Precision Potentiometer: Multiturn Wirewound Potentiometer Series AL17/19Danna PerezNoch keine Bewertungen
- Precision Potentiometer SpecsDokument6 SeitenPrecision Potentiometer SpecsDanna PerezNoch keine Bewertungen
- 6FX2001-5QP24 Datasheet enDokument2 Seiten6FX2001-5QP24 Datasheet enMasoud LotfiNoch keine Bewertungen
- 0900766b81561b77Dokument6 Seiten0900766b81561b77vikramaditya2509Noch keine Bewertungen
- Hybrid Synchronous Motor HSM1-6.17.12 - C01: Key CharacteristicsDokument4 SeitenHybrid Synchronous Motor HSM1-6.17.12 - C01: Key Characteristicsdavidj23232Noch keine Bewertungen
- 6FX2001-5QS12 Datasheet enDokument2 Seiten6FX2001-5QS12 Datasheet enClaudemir S.Noch keine Bewertungen
- MP1 Series MagnetoPotDokument4 SeitenMP1 Series MagnetoPotyayaNoch keine Bewertungen
- Encoder data sheetDokument2 SeitenEncoder data sheetJuan Perez RosasNoch keine Bewertungen
- MOTOR ID23005 128W: Ratings Symbol UnitsDokument2 SeitenMOTOR ID23005 128W: Ratings Symbol Unitsdoppler9effectNoch keine Bewertungen
- 1FG1101-1RC26-2AW1-Z D03+K06 Datasheet enDokument2 Seiten1FG1101-1RC26-2AW1-Z D03+K06 Datasheet endlquirogaNoch keine Bewertungen
- s5 DatasheetDokument7 Seitens5 DatasheetHan MoreyraNoch keine Bewertungen
- 17 en 170 Lstage DatasheetDokument1 Seite17 en 170 Lstage DatasheetSana SyedNoch keine Bewertungen
- 1GT105DC PDFDokument4 Seiten1GT105DC PDFIsos CellNoch keine Bewertungen
- 1GT105DC PDFDokument4 Seiten1GT105DC PDFIsos CellNoch keine Bewertungen
- Data SheetDokument2 SeitenData SheetShrinivas Venkataramanujam SriramNoch keine Bewertungen
- Maxon EC20 Flat 3wattDokument1 SeiteMaxon EC20 Flat 3wattElectromateNoch keine Bewertungen
- Chapter 2Dokument15 SeitenChapter 2hlyanheinhNoch keine Bewertungen
- RE 50 50mm Graphite Brushes 200W MotorDokument1 SeiteRE 50 50mm Graphite Brushes 200W MotorJorge Alejandro Barrutia BorbollaNoch keine Bewertungen
- RE50Dokument1 SeiteRE50Yhony Gamarra VargasNoch keine Bewertungen
- Incremental encoders overviewDokument6 SeitenIncremental encoders overviewsanjay1508Noch keine Bewertungen
- Hemera Datasheet (Edition 3.3)Dokument10 SeitenHemera Datasheet (Edition 3.3)opicaNoch keine Bewertungen
- 16 275 enDokument1 Seite16 275 enmawadNoch keine Bewertungen
- Datasheet ATM60-PAH13X13 1030015 enDokument7 SeitenDatasheet ATM60-PAH13X13 1030015 enhebermarcussiNoch keine Bewertungen
- Graphite Brushes, 60 Watt Maxon DC MotorDokument1 SeiteGraphite Brushes, 60 Watt Maxon DC MotorRatanieriNoch keine Bewertungen
- 30 MM, Graphite Brushes, 60 Watt: Order NumberDokument1 Seite30 MM, Graphite Brushes, 60 Watt: Order NumberRatanieriNoch keine Bewertungen
- EC 60mm 400W Brushless MotorDokument1 SeiteEC 60mm 400W Brushless MotorZoltán SoósNoch keine Bewertungen
- EAC58EA Sensor VelocidadDokument3 SeitenEAC58EA Sensor VelocidadrajalingamNoch keine Bewertungen
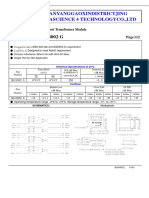
- 10/100/1000Base T Single Port Transformer Module SpecificationsDokument2 Seiten10/100/1000Base T Single Port Transformer Module SpecificationsDms TsNoch keine Bewertungen
- DS AL17 19 enDokument6 SeitenDS AL17 19 enJose ReyesNoch keine Bewertungen
- Standards and Specifications: Standard ReferenceDokument12 SeitenStandards and Specifications: Standard ReferenceIoan BarbieruNoch keine Bewertungen
- Precision Potentiometer Data SheetDokument5 SeitenPrecision Potentiometer Data SheetAdriano VolanteNoch keine Bewertungen
- 1PH8165-3FF13-0AC1 Datasheet enDokument1 Seite1PH8165-3FF13-0AC1 Datasheet enVictorNoch keine Bewertungen
- Model 357 Vishay Potentiometer SpecsDokument3 SeitenModel 357 Vishay Potentiometer SpecsMarco Antonio Esquivel BarretoNoch keine Bewertungen
- DC Tacho 3604Dokument1 SeiteDC Tacho 3604Mahesh NaikNoch keine Bewertungen
- HAE18 Absolute Rotary Encoder: Key FeaturesDokument4 SeitenHAE18 Absolute Rotary Encoder: Key Featuresbokic88Noch keine Bewertungen
- Maxon MHD 8Dokument1 SeiteMaxon MHD 8ElectromateNoch keine Bewertungen
- RCN 2000 RCN 5000 RCN 8000: Product InformationDokument12 SeitenRCN 2000 RCN 5000 RCN 8000: Product Informationamji shahNoch keine Bewertungen
- En 21 171Dokument1 SeiteEn 21 171pham tamNoch keine Bewertungen
- DC Tachometer Generator Specs and OptionsDokument3 SeitenDC Tachometer Generator Specs and OptionsJUANJAUNNoch keine Bewertungen
- Maxon RE25 Precious Metal Brushes 10wattDokument1 SeiteMaxon RE25 Precious Metal Brushes 10wattElectromateNoch keine Bewertungen
- Industrial Icp® Accelerometer: 603C91 Performance English SI Optional VersionsDokument1 SeiteIndustrial Icp® Accelerometer: 603C91 Performance English SI Optional VersionsKaradiasNoch keine Bewertungen
- Incremental Encoders: Insulated Blind Hollow Shaft Ø12... 16 MM, Cone Shaft Ø17 MM 500... 5000 Pulses Per RevolutionDokument5 SeitenIncremental Encoders: Insulated Blind Hollow Shaft Ø12... 16 MM, Cone Shaft Ø17 MM 500... 5000 Pulses Per RevolutionSachin PatilNoch keine Bewertungen
- Servo Motor EMMT-AS-60-L-HS-RMB: Data SheetDokument3 SeitenServo Motor EMMT-AS-60-L-HS-RMB: Data SheetEmiro Revilla CatariNoch keine Bewertungen
- Manual EPOS2 GettingStartedDokument36 SeitenManual EPOS2 GettingStartedLucas SuplinoNoch keine Bewertungen
- Weareable Robots IndexDokument4 SeitenWeareable Robots IndexLucas SuplinoNoch keine Bewertungen
- 28b Motion Control For Newbies PDFDokument132 Seiten28b Motion Control For Newbies PDFMRRogueNoch keine Bewertungen
- Manual EPOS2 ApplicationNotesCANopenDokument15 SeitenManual EPOS2 ApplicationNotesCANopenLucas SuplinoNoch keine Bewertungen
- Manual EPOS2 ApplicationNotesCollection PDFDokument226 SeitenManual EPOS2 ApplicationNotesCollection PDFLucas SuplinoNoch keine Bewertungen
- Catalog Driver EPOS2Dokument4 SeitenCatalog Driver EPOS2Lucas SuplinoNoch keine Bewertungen
- CAN Manual300 3-0-3 PDFDokument194 SeitenCAN Manual300 3-0-3 PDFLucas SuplinoNoch keine Bewertungen
- Encoder MILE 512-6400 CPT Channels RS 422Dokument1 SeiteEncoder MILE 512-6400 CPT Channels RS 422Lucas SuplinoNoch keine Bewertungen
- 90mm EC Brushless MotorDokument1 Seite90mm EC Brushless MotorLucas SuplinoNoch keine Bewertungen
- Writing Useful SitesDokument3 SeitenWriting Useful SitesLucas SuplinoNoch keine Bewertungen
- Munchkin CardDokument8 SeitenMunchkin CardLucas Suplino0% (1)
- LA210P Pro Loudspeaker CE-LVD Test ReportDokument73 SeitenLA210P Pro Loudspeaker CE-LVD Test ReportJL EN CONCIERTONoch keine Bewertungen
- Average Price of M&E Component For M&E Works APRIL 2011Dokument26 SeitenAverage Price of M&E Component For M&E Works APRIL 2011erickyfmNoch keine Bewertungen
- Lecture5 Chapter2 - Positive and Negative LogicDokument11 SeitenLecture5 Chapter2 - Positive and Negative LogicAyesha HussainNoch keine Bewertungen
- Lab 5Dokument11 SeitenLab 5Waleed Bashir KotlaNoch keine Bewertungen
- PM4018MUDokument11 SeitenPM4018MUaldo_suviNoch keine Bewertungen
- Laporan 1 Single PulseDokument17 SeitenLaporan 1 Single Pulsecrisma juliantariNoch keine Bewertungen
- Chapter 2 Computer EvolutionDokument28 SeitenChapter 2 Computer EvolutionmillerNoch keine Bewertungen
- GUI Based Control System Analysis Using PID Controller For EducationDokument11 SeitenGUI Based Control System Analysis Using PID Controller For Educationpascal toguNoch keine Bewertungen
- Certificado Inversor Sunny Boy 6.0Dokument1 SeiteCertificado Inversor Sunny Boy 6.0PoloRodriguezNoch keine Bewertungen
- PSC WP Energising Ireland A Guide To Grid Code Compliance K.YumakDokument14 SeitenPSC WP Energising Ireland A Guide To Grid Code Compliance K.Yumakp61466365Noch keine Bewertungen
- High surge SCRs for power suppliesDokument5 SeitenHigh surge SCRs for power suppliesHernan Vallenilla Rumildo MixNoch keine Bewertungen
- Jabra A120s User ManualDokument51 SeitenJabra A120s User Manualapi-26157899Noch keine Bewertungen
- 354 39 Solutions Instructor Manual 11 Hardware Features 8051 Chapter 11Dokument8 Seiten354 39 Solutions Instructor Manual 11 Hardware Features 8051 Chapter 11Saravanan JayabalanNoch keine Bewertungen
- PLL 2164Dokument24 SeitenPLL 2164Benjamín Varela UmbralNoch keine Bewertungen
- Teradyne Hastings Vacuum Gage BrochrureDokument2 SeitenTeradyne Hastings Vacuum Gage Brochrurekp83Noch keine Bewertungen
- s7-300 MMC Card Memory ResetDokument3 Seitens7-300 MMC Card Memory Resetrigo_sk100% (1)
- CN391 - Single ESSP Interface Between Smart Payout and Hopper AssemblyDokument1 SeiteCN391 - Single ESSP Interface Between Smart Payout and Hopper AssemblyAymen CheffiNoch keine Bewertungen
- Beko TV LCD 14-20 Chassis LCDokument33 SeitenBeko TV LCD 14-20 Chassis LCwajkNoch keine Bewertungen
- iGX440U: Werkstatt-Handbuch Manual de Taller Shop Manual Manuel D' AtelierDokument10 SeiteniGX440U: Werkstatt-Handbuch Manual de Taller Shop Manual Manuel D' AtelierAlbertoNoch keine Bewertungen
- ETH-2 For Compact/Modular 3rd Generation PSS: Operating Manual - Item No. 21140-EN-04Dokument72 SeitenETH-2 For Compact/Modular 3rd Generation PSS: Operating Manual - Item No. 21140-EN-04RUBENNoch keine Bewertungen
- Gate 2014 Syllabus For Instrumentation Engineering inDokument6 SeitenGate 2014 Syllabus For Instrumentation Engineering inrahulchangderNoch keine Bewertungen
- M.tech Lab Manual - PSSDokument33 SeitenM.tech Lab Manual - PSSsuresh270Noch keine Bewertungen
- Whole-House Music in A Box: Zr-4 4 Source, 4 Zone Multizone Receiver Kit With Am/Fm TunerDokument6 SeitenWhole-House Music in A Box: Zr-4 4 Source, 4 Zone Multizone Receiver Kit With Am/Fm TunerOmarr33Noch keine Bewertungen
- Final ProjectDokument10 SeitenFinal Projectapi-271770058Noch keine Bewertungen
- Short Type Questions of Three Phase Induction Motor - 01.04.2020Dokument5 SeitenShort Type Questions of Three Phase Induction Motor - 01.04.2020Amit DebnathNoch keine Bewertungen
- Phy VivaDokument3 SeitenPhy VivaKaran RMWNoch keine Bewertungen
- Chapter 8 State Space AnalysisDokument22 SeitenChapter 8 State Space AnalysisAli AhmadNoch keine Bewertungen
- TRIO 50.0 TL OUTD US 480 - Rev.G PDFDokument4 SeitenTRIO 50.0 TL OUTD US 480 - Rev.G PDFmarcosNoch keine Bewertungen
- LED Thin PAR64 User ManualDokument10 SeitenLED Thin PAR64 User ManualAndy P ParsonsNoch keine Bewertungen
- Temperature Sensor Instruction ManualDokument41 SeitenTemperature Sensor Instruction ManualFARHANUDDIN100% (1)