Das könnte Ihnen auch gefallen
- Mathematics 1St First Order Linear Differential Equations 2Nd Second Order Linear Differential Equations Laplace Fourier Bessel MathematicsVon EverandMathematics 1St First Order Linear Differential Equations 2Nd Second Order Linear Differential Equations Laplace Fourier Bessel MathematicsNoch keine Bewertungen
- Elementary Differential Equations with Linear AlgebraVon EverandElementary Differential Equations with Linear AlgebraNoch keine Bewertungen
- Integral CalculusDokument25 SeitenIntegral CalculusLiregine CaymeNoch keine Bewertungen
- 2016-Acjc-Promo-Scan (9758)Dokument22 Seiten2016-Acjc-Promo-Scan (9758)Simon AngNoch keine Bewertungen
- Differential Equations: A Visual Introduction For Beginners: by Dan UmbargerDokument55 SeitenDifferential Equations: A Visual Introduction For Beginners: by Dan UmbargerMarcelo Aleksander LiraNoch keine Bewertungen
- Diophantine EquationsDokument4 SeitenDiophantine EquationsAnonymous 1QBR9bOmuNoch keine Bewertungen
- Quantum Tunneling Through A BarrierDokument12 SeitenQuantum Tunneling Through A Barrierjasmine-rNoch keine Bewertungen
- Geometrical Foundations of Continuum Mechanics: Paul SteinmannDokument534 SeitenGeometrical Foundations of Continuum Mechanics: Paul Steinmann毛文奇Noch keine Bewertungen
- Chapter3.2 Linear Algebraic Equation - LU in & Matrix InversionDokument33 SeitenChapter3.2 Linear Algebraic Equation - LU in & Matrix InversionAhmad FadzlanNoch keine Bewertungen
- CE304-Unit 3-Lect2-Jumah2018Dokument14 SeitenCE304-Unit 3-Lect2-Jumah2018محمد بركاتNoch keine Bewertungen
- NM Term ReportDokument14 SeitenNM Term ReportZarar SaleemNoch keine Bewertungen
- Ch10 LU Decomposition 21Dokument34 SeitenCh10 LU Decomposition 21AmaniNoch keine Bewertungen
- 4 Numerical Methods PDFDokument12 Seiten4 Numerical Methods PDFPrashantKumarNoch keine Bewertungen
- Cholesky and LDL Decomposition: B X A N NDokument18 SeitenCholesky and LDL Decomposition: B X A N Nmacynthia26Noch keine Bewertungen
- Cyclic ReductionDokument15 SeitenCyclic ReductionPrashant SinghNoch keine Bewertungen
- Backlund Transformation PDFDokument11 SeitenBacklund Transformation PDFShaurya SethNoch keine Bewertungen
- Application of Integration: MotivationDokument16 SeitenApplication of Integration: Motivationtimothy_wong_47Noch keine Bewertungen
- Unit 4Dokument55 SeitenUnit 4GoliBharggavNoch keine Bewertungen
- Solving Systems of Linear EquationsDokument9 SeitenSolving Systems of Linear EquationsGebrekirstos TsegayNoch keine Bewertungen
- Numerical Methods NotesDokument180 SeitenNumerical Methods NotesSyed Hasif Sy Mohamad100% (1)
- Solution of First Order Differential Equations (Exact Differential Equations)Dokument37 SeitenSolution of First Order Differential Equations (Exact Differential Equations)Nazeer SurchiNoch keine Bewertungen
- Hacettepe University Department of Environmental EngineeringDokument44 SeitenHacettepe University Department of Environmental EngineeringDilan AğkoçNoch keine Bewertungen
- Review Notes For Discrete MathematicsDokument10 SeitenReview Notes For Discrete MathematicsJohn Robert BautistaNoch keine Bewertungen
- Ax B A Linear Equation: MN MN MN MNDokument19 SeitenAx B A Linear Equation: MN MN MN MNSerkan SancakNoch keine Bewertungen
- PleteDokument16 SeitenPleteMatthew AtkinsonNoch keine Bewertungen
- Phase Test 2011 With AnswersDokument17 SeitenPhase Test 2011 With AnswersKaranPatelNoch keine Bewertungen
- Differential EquationsDokument20 SeitenDifferential EquationsgogoagoneNoch keine Bewertungen
- Linear Algebraic Equations: N' Ax C A' NXN' C' nx1' X' nx1' LUDokument85 SeitenLinear Algebraic Equations: N' Ax C A' NXN' C' nx1' X' nx1' LUThangadurai Senthil Ram PrabhuNoch keine Bewertungen
- 2.2.1 A Solution Method: 2.3 Row Operations and Equivalent SystemsDokument139 Seiten2.2.1 A Solution Method: 2.3 Row Operations and Equivalent SystemsDaniel DadaNoch keine Bewertungen
- Linear Equation in Two Variables Can Be Written AsDokument30 SeitenLinear Equation in Two Variables Can Be Written Asmahesh prasadNoch keine Bewertungen
- UNIT 8 Geotechnical EngineeringDokument29 SeitenUNIT 8 Geotechnical EngineeringrbhavishNoch keine Bewertungen
- Solving Second Order Differential Equations in Quantum Mechanics by Order ReductionDokument15 SeitenSolving Second Order Differential Equations in Quantum Mechanics by Order ReductionKnspeisNoch keine Bewertungen
- Section 5 SecondDokument10 SeitenSection 5 SecondYogi Firman AndikaNoch keine Bewertungen
- Hanging ChainDokument5 SeitenHanging ChainŞener KılıçNoch keine Bewertungen
- Sistem Persamaan Linear 2Dokument38 SeitenSistem Persamaan Linear 2Gunawan RisdiyantoNoch keine Bewertungen
- Systems of Linear Equations: Eduardo E. Descalsota, JRDokument69 SeitenSystems of Linear Equations: Eduardo E. Descalsota, JRClemen SalvadorNoch keine Bewertungen
- BaristocranaDokument3 SeitenBaristocranajonnathan_andreNoch keine Bewertungen
- Chapter 5Dokument25 SeitenChapter 5Omed. HNoch keine Bewertungen
- Lecture Notes22Dokument78 SeitenLecture Notes22Chandan GuptaNoch keine Bewertungen
- Nef 2023 TutorialDokument9 SeitenNef 2023 TutorialMd Sahin SirajNoch keine Bewertungen
- Elastic ADokument47 SeitenElastic Ar_zoro87Noch keine Bewertungen
- 16.21 Techniques of Structural Analysis and Design Spring 2005 Unit #1Dokument4 Seiten16.21 Techniques of Structural Analysis and Design Spring 2005 Unit #1customerxNoch keine Bewertungen
- Differential Equations Part2Dokument14 SeitenDifferential Equations Part2shan kumarNoch keine Bewertungen
- Linear Equations and Inequalities ch02 Section2Dokument14 SeitenLinear Equations and Inequalities ch02 Section2sajid93Noch keine Bewertungen
- Equations Reducible To Variables SeparableDokument4 SeitenEquations Reducible To Variables SeparablebenrasheedNoch keine Bewertungen
- The Hypergeometric Differential Equation With Cubic Curves As Schwarz ImagesDokument20 SeitenThe Hypergeometric Differential Equation With Cubic Curves As Schwarz Images3873263Noch keine Bewertungen
- Chapter 3,4 For EngineeringDokument24 SeitenChapter 3,4 For EngineeringAbel TayeNoch keine Bewertungen
- Chapter 10. Introduction To Quantum Mechanics: Ikx IkxDokument5 SeitenChapter 10. Introduction To Quantum Mechanics: Ikx IkxChandler LovelandNoch keine Bewertungen
- Persamaan Diferensial Orde-TinggiDokument42 SeitenPersamaan Diferensial Orde-TinggialvendaNoch keine Bewertungen
- Numerical Analysis-II Math-604 BS Part-IV Mathematics: Solution of Linear Equations and Matrix InversionDokument58 SeitenNumerical Analysis-II Math-604 BS Part-IV Mathematics: Solution of Linear Equations and Matrix InversionSoniyaKanwalGNoch keine Bewertungen
- EXERCISES MiscDokument11 SeitenEXERCISES MiscMelissa San JoaquinNoch keine Bewertungen
- Lecture5 - Linear Algebraic Equations - 18march2024 - NK - v1Dokument54 SeitenLecture5 - Linear Algebraic Equations - 18march2024 - NK - v1yamanfNoch keine Bewertungen
- Rook PivotingDokument12 SeitenRook PivotingelomaniparoNoch keine Bewertungen
- C1 Booklet 2013Dokument64 SeitenC1 Booklet 2013dturner29Noch keine Bewertungen
- Simple EliminationDokument7 SeitenSimple Eliminationual_jauhariNoch keine Bewertungen
- Clifford S AlgebraDokument90 SeitenClifford S AlgebraJorgeGrajalesRivera100% (1)
- Notes03 - Linear EquationsDokument5 SeitenNotes03 - Linear EquationsjessNoch keine Bewertungen
- IIAR Standards: Peter Thomas, P.E., CSP - Resource Compliance, IncDokument43 SeitenIIAR Standards: Peter Thomas, P.E., CSP - Resource Compliance, Incสติง ยูคลิฟNoch keine Bewertungen
- Evaporative Condenser Control in Industrial Refrigeration SystemsDokument16 SeitenEvaporative Condenser Control in Industrial Refrigeration SystemsBao NguyenNoch keine Bewertungen
- Mi 2892Dokument2 SeitenMi 2892Jossemar Bartolo OnayramNoch keine Bewertungen
- MSC Thesis IsaccoDokument99 SeitenMSC Thesis Isaccoสติง ยูคลิฟNoch keine Bewertungen
- Energies 12 00354 v2Dokument24 SeitenEnergies 12 00354 v2สติง ยูคลิฟNoch keine Bewertungen
- Research Methodology Kittiwet 13mar21Dokument24 SeitenResearch Methodology Kittiwet 13mar21สติง ยูคลิฟNoch keine Bewertungen
- RSM - 20210527Dokument97 SeitenRSM - 20210527สติง ยูคลิฟNoch keine Bewertungen
- Entropy: Exergy Analysis of A Subcritical Refrigeration Cycle With An Improved Impulse Turbo ExpanderDokument16 SeitenEntropy: Exergy Analysis of A Subcritical Refrigeration Cycle With An Improved Impulse Turbo Expanderคงเดช คํานึกNoch keine Bewertungen
- Materials Science in Semiconductor ProcessingDokument5 SeitenMaterials Science in Semiconductor Processingสติง ยูคลิฟNoch keine Bewertungen
- A Study of Low GWP Refrigerants For Transport Refrigeration BasedDokument10 SeitenA Study of Low GWP Refrigerants For Transport Refrigeration Basedคงเดช คํานึกNoch keine Bewertungen
- Refrigerant R22 Properties TableDokument4 SeitenRefrigerant R22 Properties TableKiki Indra HNoch keine Bewertungen
- Property Tables and Charts (Si Units)Dokument50 SeitenProperty Tables and Charts (Si Units)Q_TNoch keine Bewertungen
- Thermodynamic Analysis of Vapor Absorption Refrigeration System and Calculation of COPDokument8 SeitenThermodynamic Analysis of Vapor Absorption Refrigeration System and Calculation of COPEver Ospino MeloNoch keine Bewertungen
- Vaidyaraman and Maranas AIChE J 1999Dokument21 SeitenVaidyaraman and Maranas AIChE J 1999สติง ยูคลิฟNoch keine Bewertungen
- Dissertation - Robust Modal Filtering For Control of Flexible AircraftDokument337 SeitenDissertation - Robust Modal Filtering For Control of Flexible Aircraftสติง ยูคลิฟNoch keine Bewertungen
- RSM - 20210527Dokument97 SeitenRSM - 20210527สติง ยูคลิฟNoch keine Bewertungen
- A Study of Low GWP Refrigerants For Transport Refrigeration BasedDokument10 SeitenA Study of Low GWP Refrigerants For Transport Refrigeration Basedคงเดช คํานึกNoch keine Bewertungen
- Property Tables and Charts (Si Units)Dokument50 SeitenProperty Tables and Charts (Si Units)Q_TNoch keine Bewertungen
- A Study of Low GWP Refrigerants For Transport Refrigeration BasedDokument10 SeitenA Study of Low GWP Refrigerants For Transport Refrigeration Basedคงเดช คํานึกNoch keine Bewertungen
- Engineering Research Methodology01 Research QuestionsDokument70 SeitenEngineering Research Methodology01 Research Questionsสติง ยูคลิฟNoch keine Bewertungen
- General Force ResponseDokument29 SeitenGeneral Force Responseสติง ยูคลิฟNoch keine Bewertungen
- RSM - 20210527Dokument97 SeitenRSM - 20210527สติง ยูคลิฟNoch keine Bewertungen
- Thesis - A Method For Aircraft Concept Exploration Using Multicriteria Interactive Genetic AlgorithmsDokument256 SeitenThesis - A Method For Aircraft Concept Exploration Using Multicriteria Interactive Genetic Algorithmsสติง ยูคลิฟNoch keine Bewertungen
- Mech Final 6 7 8 2 PDFDokument3 SeitenMech Final 6 7 8 2 PDFสติง ยูคลิฟNoch keine Bewertungen
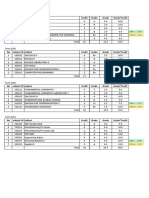
- No Subjact ID Subjact Credit Grade Grade Grade Credit: GPAX 3.54Dokument1 SeiteNo Subjact ID Subjact Credit Grade Grade Grade Credit: GPAX 3.54สติง ยูคลิฟNoch keine Bewertungen
- Solving A System of Equations: ObjectivesDokument20 SeitenSolving A System of Equations: Objectivesสติง ยูคลิฟNoch keine Bewertungen
- No Subjact ID Subjact Credit Grade Grade Grade Credit: GPAX 3.54Dokument1 SeiteNo Subjact ID Subjact Credit Grade Grade Grade Credit: GPAX 3.54สติง ยูคลิฟNoch keine Bewertungen
- ตัวอย่างการสร้างกราฟที่ดีDokument2 Seitenตัวอย่างการสร้างกราฟที่ดีสติง ยูคลิฟNoch keine Bewertungen
- Euler Bernoulli PDFDokument2 SeitenEuler Bernoulli PDFJoshuaNoch keine Bewertungen
- Why We Study Numerical MethodsDokument9 SeitenWhy We Study Numerical MethodsLawrencium BaringNoch keine Bewertungen
- OdesDokument31 SeitenOdesRikárdo CamposNoch keine Bewertungen
- MStat PSA 2019Dokument20 SeitenMStat PSA 2019DHIRAJ DILLEP S NAIRNoch keine Bewertungen
- Philippe Viola - Can Bioquantum Theory Help Solving The Problems Faced by The GCP Team?Dokument2 SeitenPhilippe Viola - Can Bioquantum Theory Help Solving The Problems Faced by The GCP Team?Dominos021Noch keine Bewertungen
- Difference Equations & Z-TransformsDokument8 SeitenDifference Equations & Z-Transformsvidya_sagar826Noch keine Bewertungen
- Fast Sparse Matrix MultiplicationDokument11 SeitenFast Sparse Matrix MultiplicationRocky BarusNoch keine Bewertungen
- Preboard MATH SetADokument10 SeitenPreboard MATH SetAFritz FatigaNoch keine Bewertungen
- Worksheet - Continuity and DifferentiabilityDokument3 SeitenWorksheet - Continuity and DifferentiabilityKrish AnandNoch keine Bewertungen
- CSU e-PASA Lectures 2020 (Mathematics Category) : Learning Activity Sheet Statistics and ProbabilityDokument5 SeitenCSU e-PASA Lectures 2020 (Mathematics Category) : Learning Activity Sheet Statistics and ProbabilityCybille Joy OlaybarNoch keine Bewertungen
- Math Curriculum GuideDokument23 SeitenMath Curriculum GuideChristeanne Justerine MendozaNoch keine Bewertungen
- 11 - MDOF - Eigen ProblDokument30 Seiten11 - MDOF - Eigen ProblIoannis BazosNoch keine Bewertungen
- Mercator Pri Ject I eDokument212 SeitenMercator Pri Ject I ePieter JacqmaerNoch keine Bewertungen
- ELE 4201 Control Systems Laboratory - 2Dokument6 SeitenELE 4201 Control Systems Laboratory - 2Khandai SeenananNoch keine Bewertungen
- Engineering Mathematics: Unit 1Dokument40 SeitenEngineering Mathematics: Unit 1AnkitaNoch keine Bewertungen
- Question Bank (Bba N 406-Operation Research: 2014-17) : Very Short & Short Answer QuestionsDokument4 SeitenQuestion Bank (Bba N 406-Operation Research: 2014-17) : Very Short & Short Answer QuestionsSushil MauryaNoch keine Bewertungen
- Ebe1133 Lu2 2022Dokument53 SeitenEbe1133 Lu2 2022M.Musirah Abdul HamidNoch keine Bewertungen
- Introduction and Perspectives: December 28, 2015 14:27 Macroscopic Electrodynamics: An - . - 9in X 6in EmbookDokument28 SeitenIntroduction and Perspectives: December 28, 2015 14:27 Macroscopic Electrodynamics: An - . - 9in X 6in EmbookMartín FigueroaNoch keine Bewertungen
- A Mathematical Approach From Classical Control To Advanced ControlDokument346 SeitenA Mathematical Approach From Classical Control To Advanced ControlMohammed Ahsan FawadNoch keine Bewertungen
- Assignment 6Dokument4 SeitenAssignment 6Ryan ArcherNoch keine Bewertungen
- ECE 3620 Lecture 5 - Zero-Input Solution of Differential EquationsDokument6 SeitenECE 3620 Lecture 5 - Zero-Input Solution of Differential EquationsbaruaeeeNoch keine Bewertungen
- Differential EquationsDokument5 SeitenDifferential EquationsAira Cannille LalicNoch keine Bewertungen
- Cauchy Euler Differential EquationDokument5 SeitenCauchy Euler Differential EquationDhiren Pandit100% (1)
- Linear ConvolutionDokument17 SeitenLinear ConvolutionRahul DeshpandeNoch keine Bewertungen
- Full Download Introduction To Digital Communications 1st Edition Grami Solutions ManualDokument35 SeitenFull Download Introduction To Digital Communications 1st Edition Grami Solutions Manualthomasstonetyy6100% (44)
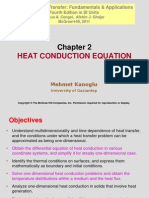
- Heat Conduction Equation: Heat and Mass Transfer: Fundamentals & ApplicationsDokument48 SeitenHeat Conduction Equation: Heat and Mass Transfer: Fundamentals & ApplicationsMatthew Shields100% (1)
- TRIAL MATHEMATICS T 2021 Kluang Q P2Dokument2 SeitenTRIAL MATHEMATICS T 2021 Kluang Q P2ZurainiNoch keine Bewertungen
- Simplex Method Problem-SolvedDokument3 SeitenSimplex Method Problem-SolvedChandra HasanNoch keine Bewertungen