Das könnte Ihnen auch gefallen
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkVon EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkNoch keine Bewertungen
- Kramer DriveDokument42 SeitenKramer DriveSenthil Kumar100% (1)
- ECE 8830 - Electric Drives: Topic 11: Slip-Recovery Drives For Wound-Field Induction MotorsDokument42 SeitenECE 8830 - Electric Drives: Topic 11: Slip-Recovery Drives For Wound-Field Induction MotorsVikas Roy100% (1)
- Induction Motor Modeling - Steady StateDokument43 SeitenInduction Motor Modeling - Steady Statedivinelight100% (3)
- Induction Motor Drive PDFDokument8 SeitenInduction Motor Drive PDFSwostik RoutNoch keine Bewertungen
- Three-Phase Induction MachinesDokument46 SeitenThree-Phase Induction MachinesWakgari TadesaNoch keine Bewertungen
- Polyphase Induction MachinesDokument7 SeitenPolyphase Induction Machinespurushg62Noch keine Bewertungen
- Induction Motor Speed ControlDokument46 SeitenInduction Motor Speed Controlsolo400060% (10)
- Asynchronous MachineDokument15 SeitenAsynchronous MachineboumedienNoch keine Bewertungen
- Induction MotorDokument39 SeitenInduction MotorSaneer M SaliNoch keine Bewertungen
- Dcmotors and Their RepresentationDokument61 SeitenDcmotors and Their RepresentationSoeprapto AtmariNoch keine Bewertungen
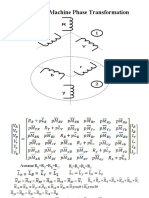
- Induction Machine Phase TransformationDokument20 SeitenInduction Machine Phase Transformation7sn omerNoch keine Bewertungen
- Induction MotorDokument39 SeitenInduction MotorAhmed MagdyNoch keine Bewertungen
- 4th Module 2Dokument11 Seiten4th Module 2dilja aravindanNoch keine Bewertungen
- Induction Motors PDFDokument108 SeitenInduction Motors PDFKshitij ShrivastavaNoch keine Bewertungen
- Lab Manual: ACADEMIC YEAR 2015-16Dokument48 SeitenLab Manual: ACADEMIC YEAR 2015-16ramjiNoch keine Bewertungen
- Solid State Drives: Notes of Lesson PlanDokument24 SeitenSolid State Drives: Notes of Lesson PlanetasureshNoch keine Bewertungen
- CH 3 - Induction MotorsDokument46 SeitenCH 3 - Induction MotorsMiz AelyfhaNoch keine Bewertungen
- Ied Unit VDokument8 SeitenIed Unit VRudra Kumar MishraNoch keine Bewertungen
- InductionMotors Gate Material PartBDokument38 SeitenInductionMotors Gate Material PartBpraveen6494Noch keine Bewertungen
- Elx 311 Chap 7 SlidesDokument23 SeitenElx 311 Chap 7 SlidesDaniyar SeytenovNoch keine Bewertungen
- Help - Asynchronous Machine - Blocks (SimPowerSystems™) PDFDokument23 SeitenHelp - Asynchronous Machine - Blocks (SimPowerSystems™) PDFnmulyonoNoch keine Bewertungen
- Chapter 6B - IMDokument31 SeitenChapter 6B - IMNour Ziad Ibrahim AlkurdiNoch keine Bewertungen
- Beee Unit-4 Induction & Synchronous MotorsDokument27 SeitenBeee Unit-4 Induction & Synchronous MotorssrujithvedagiriNoch keine Bewertungen
- 02-1 Synchronous MachinesDokument48 Seiten02-1 Synchronous MachinesvenikiranNoch keine Bewertungen
- 7 Induction Motor BasicsDokument51 Seiten7 Induction Motor BasicsFos AlharbiNoch keine Bewertungen
- Induction Machine-2020Dokument95 SeitenInduction Machine-2020Bharat SinghNoch keine Bewertungen
- CYCLE-2:Experiment 1 Steady-State Performance of A 3-Phase Induction MotorDokument32 SeitenCYCLE-2:Experiment 1 Steady-State Performance of A 3-Phase Induction MotorSumit SinghNoch keine Bewertungen
- Electric Motor 2Dokument60 SeitenElectric Motor 2setsindia3735Noch keine Bewertungen
- Deternmination IM ParametersDokument26 SeitenDeternmination IM ParametersAli AltahirNoch keine Bewertungen
- TF Armature Controlled DC MotorDokument9 SeitenTF Armature Controlled DC Motoremail2vadivel100% (2)
- S.NO. 1 Single Phase Half Wave Rectifier With R & RL Load AimDokument15 SeitenS.NO. 1 Single Phase Half Wave Rectifier With R & RL Load AimShailendra KumarNoch keine Bewertungen
- Electrical Machine K-NotesDokument38 SeitenElectrical Machine K-NotesAkashGauravNoch keine Bewertungen
- 02 Single Phase Im 02Dokument8 Seiten02 Single Phase Im 02Suleiman Abubakar AuduNoch keine Bewertungen
- Ac DrivesDokument36 SeitenAc Drivesaswardi50% (2)
- High Chopper Frequency Drive of Wound Rotor Induction Motor With A Resistively Loaded Rotor ChopperDokument5 SeitenHigh Chopper Frequency Drive of Wound Rotor Induction Motor With A Resistively Loaded Rotor ChopperchandanjuenggNoch keine Bewertungen
- Speed Control of 3 Phase Induction Motor 1 Aim: Experiment No: 3Dokument10 SeitenSpeed Control of 3 Phase Induction Motor 1 Aim: Experiment No: 3rohitkjNoch keine Bewertungen
- Scalar Control of Im PDFDokument28 SeitenScalar Control of Im PDFDaniel DanyNoch keine Bewertungen
- Laboratory Session 8 Squirrel Cage Induction Motor CharacteristicsDokument15 SeitenLaboratory Session 8 Squirrel Cage Induction Motor CharacteristicshinsermuNoch keine Bewertungen
- Motor DrivesDokument61 SeitenMotor DrivesSatesh NairNoch keine Bewertungen
- Ac Motor Drives: Presentation OnDokument19 SeitenAc Motor Drives: Presentation Onruchita dahadNoch keine Bewertungen
- AC Drives: Dr. Adel A. El-Samahy Department of Electrical Engineering University of HelwanDokument25 SeitenAC Drives: Dr. Adel A. El-Samahy Department of Electrical Engineering University of Helwanadelelsamahy5958Noch keine Bewertungen
- 7 - Lecture - Induction MotorsDokument41 Seiten7 - Lecture - Induction MotorspaurushgodharNoch keine Bewertungen
- CSLABMANUALDokument99 SeitenCSLABMANUALGOKUL RNoch keine Bewertungen
- Electrical Machines: Induction Motors - NoteDokument41 SeitenElectrical Machines: Induction Motors - NotealeeshaNoch keine Bewertungen
- Ee 212 Ac Induction MotorsDokument9 SeitenEe 212 Ac Induction MotorsabigabacNoch keine Bewertungen
- Slip Torque Characteristics of Induction MotorDokument22 SeitenSlip Torque Characteristics of Induction MotorSree ShobhaNoch keine Bewertungen
- AC-Motor Time ConstantDokument32 SeitenAC-Motor Time ConstantMorten BroNoch keine Bewertungen
- Suraj GahalyanDokument6 SeitenSuraj GahalyanSuraj GahalyanNoch keine Bewertungen
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Von EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Noch keine Bewertungen
- Handbook of Power Systems Engineering with Power Electronics ApplicationsVon EverandHandbook of Power Systems Engineering with Power Electronics ApplicationsNoch keine Bewertungen
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesVon EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesNoch keine Bewertungen
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Von EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Bewertung: 2.5 von 5 Sternen2.5/5 (3)
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlVon EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlBewertung: 5 von 5 Sternen5/5 (1)
- Variable Speed AC Drives with Inverter Output FiltersVon EverandVariable Speed AC Drives with Inverter Output FiltersNoch keine Bewertungen
- Slip Power Recovery SchemesDokument24 SeitenSlip Power Recovery SchemesMagudeeswaran MagudeeswaranNoch keine Bewertungen
- AbstractDokument1 SeiteAbstractMagudeeswaran MagudeeswaranNoch keine Bewertungen
- AbstractDokument1 SeiteAbstractMagudeeswaran MagudeeswaranNoch keine Bewertungen
- 05 EE394J 2 Spring12 Per Unit SystemDokument3 Seiten05 EE394J 2 Spring12 Per Unit SystemKrish GokulNoch keine Bewertungen
- 2019 Summer Model Answer Paper (Msbte Study Resources)Dokument25 Seiten2019 Summer Model Answer Paper (Msbte Study Resources)samarthenterprises122Noch keine Bewertungen
- Product: Complete Diagnostic SolutionsDokument8 SeitenProduct: Complete Diagnostic SolutionsbhpNoch keine Bewertungen
- Acusine 2013 PDFDokument20 SeitenAcusine 2013 PDFLuizNoch keine Bewertungen
- LT - Power - Cable Schedule For Garret Line (Danieli)Dokument3 SeitenLT - Power - Cable Schedule For Garret Line (Danieli)zibraltan1Noch keine Bewertungen
- O-Level Physics Bank Questions, 2019 PDFDokument30 SeitenO-Level Physics Bank Questions, 2019 PDFmukhtar ahmed67% (3)
- PBD Chapter 6Dokument17 SeitenPBD Chapter 6Aathirah HashimNoch keine Bewertungen
- Source India Event Participant DetailsDokument17 SeitenSource India Event Participant DetailsnischalNoch keine Bewertungen
- Investigations Into The Transformer Inrush Current Problem: E-Mail Addresses: Barry - Rawn@brunel - Ac.ukDokument7 SeitenInvestigations Into The Transformer Inrush Current Problem: E-Mail Addresses: Barry - Rawn@brunel - Ac.ukmassimo bartoliNoch keine Bewertungen
- Ece249-Basic Electrical and Electronics EngineeringDokument2 SeitenEce249-Basic Electrical and Electronics EngineeringRahul RajNoch keine Bewertungen
- Load Test of Single Phase Transformer Phase: Expt. No: DateDokument11 SeitenLoad Test of Single Phase Transformer Phase: Expt. No: Datesameerpatel15770Noch keine Bewertungen
- Chapter 2-Transformers PDFDokument103 SeitenChapter 2-Transformers PDFkessam92100% (1)
- Apti Ans SetDokument101 SeitenApti Ans SetSourabh KoshtiNoch keine Bewertungen
- ZN1 ManualDokument40 SeitenZN1 Manualpkgoyal1983Noch keine Bewertungen
- Cigre A2 102Dokument8 SeitenCigre A2 102sorry2qazNoch keine Bewertungen
- Current TransformerDokument25 SeitenCurrent TransformerHimdad Tahir0% (1)
- Noik 2006Dokument12 SeitenNoik 2006Adryan MarstyaNoch keine Bewertungen
- Substation Training ModuleDokument94 SeitenSubstation Training ModuleBakhshiNoch keine Bewertungen
- SSC JE 2023 Electrical EngineeringDokument65 SeitenSSC JE 2023 Electrical Engineeringgamers die hardersNoch keine Bewertungen
- Capacitive Battery Charger (Preview)Dokument11 SeitenCapacitive Battery Charger (Preview)George Wiseman33% (3)
- Voltage Control Gyanendra Sharma Npti DelhiDokument56 SeitenVoltage Control Gyanendra Sharma Npti DelhiNPTINoch keine Bewertungen
- Rexroth HCS-01 Drive Project Planning Manual R911322210 - 03Dokument310 SeitenRexroth HCS-01 Drive Project Planning Manual R911322210 - 03leoxavierfdd2Noch keine Bewertungen
- Lalpir Thermal Power Plant Internship ReportDokument38 SeitenLalpir Thermal Power Plant Internship ReportKhawaja Muhammad MoinNoch keine Bewertungen
- Handbook 2014 - 15 EEE Department-IV Year I SemDokument55 SeitenHandbook 2014 - 15 EEE Department-IV Year I SemRoopa ReddyNoch keine Bewertungen
- Low Voltage Current Transformer Low Voltage Current TransformerDokument4 SeitenLow Voltage Current Transformer Low Voltage Current Transformersamuel yigaNoch keine Bewertungen
- MOT Spot Welder: Food Living Outside Play Technology WorkshopDokument11 SeitenMOT Spot Welder: Food Living Outside Play Technology Workshopprivate 2Noch keine Bewertungen
- (CIGRE Green Books) B-Lifetime Management of FACTS Controllers (2018) PDFDokument41 Seiten(CIGRE Green Books) B-Lifetime Management of FACTS Controllers (2018) PDFGustavo Aguayo100% (1)
- CT GuideDokument20 SeitenCT Guidearsalanhamid100% (3)
- Balance of Power Multiphysics AA V8 I2Dokument3 SeitenBalance of Power Multiphysics AA V8 I2SrashmiNoch keine Bewertungen
- Is.4201.1983 Application Guide For Current Transformer PDFDokument27 SeitenIs.4201.1983 Application Guide For Current Transformer PDFMukesh KumarNoch keine Bewertungen