Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (890)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Ample Sarv3Dokument4 SeitenAmple Sarv3ferea_sail100% (1)
- Sample Test Cases For Testing Web and Desktop ApplicationsDokument7 SeitenSample Test Cases For Testing Web and Desktop ApplicationsRohit Khurana100% (1)
- WWW - Efm.leeds - Ac.uk CIVE CIVE2400 OpenChannelHydraulics2Dokument39 SeitenWWW - Efm.leeds - Ac.uk CIVE CIVE2400 OpenChannelHydraulics2Prabu Rengarajan100% (1)
- Plinth Beams: Control Room Beam ReinforcementDokument2 SeitenPlinth Beams: Control Room Beam ReinforcementRama KrishnaNoch keine Bewertungen
- Design PDF BommakurDokument113 SeitenDesign PDF BommakurRama KrishnaNoch keine Bewertungen
- Guidelines For Design of SpillwayDokument8 SeitenGuidelines For Design of Spillwayrvkumar3619690Noch keine Bewertungen
- Suryashtakam Telugu Large PDFDokument2 SeitenSuryashtakam Telugu Large PDFRama KrishnaNoch keine Bewertungen
- Stair CaseDokument2 SeitenStair CaseRama KrishnaNoch keine Bewertungen
- Sri. T.Hanumanth Rao, Chief Engineer (RTD) GuidelinesDokument117 SeitenSri. T.Hanumanth Rao, Chief Engineer (RTD) Guidelinesrvkumar3619690100% (21)
- Pres Sure M Ain 7.65 0 K M: TUNNEL FROM KM 7.900 TO KM 8.250 (350M)Dokument1 SeitePres Sure M Ain 7.65 0 K M: TUNNEL FROM KM 7.900 TO KM 8.250 (350M)Rama KrishnaNoch keine Bewertungen
- 7KH3URMHFW2$6,65HSRUW: (Old Age Social and Income Security Project)Dokument50 Seiten7KH3URMHFW2$6,65HSRUW: (Old Age Social and Income Security Project)nagasantoshNoch keine Bewertungen
- Raft DesignDokument3 SeitenRaft DesignRama KrishnaNoch keine Bewertungen
- Staad InputDokument57 SeitenStaad InputRama KrishnaNoch keine Bewertungen
- Annexure-B: Stability of Foundation Against ShearDokument2 SeitenAnnexure-B: Stability of Foundation Against ShearRama KrishnaNoch keine Bewertungen
- Reinforcement Details of Raft Plan Fondation Plan: C4 C4 C5 C6 C6Dokument4 SeitenReinforcement Details of Raft Plan Fondation Plan: C4 C4 C5 C6 C6Rama KrishnaNoch keine Bewertungen
- Slab DesignDokument8 SeitenSlab DesignRama KrishnaNoch keine Bewertungen
- Loading CaluculationDokument2 SeitenLoading CaluculationRama KrishnaNoch keine Bewertungen
- Architectural Details of Control Room Near Regulator at AnnaramDokument1 SeiteArchitectural Details of Control Room Near Regulator at AnnaramRama KrishnaNoch keine Bewertungen
- 2.SLB ON Surplus course1-GAD-1 PDFDokument1 Seite2.SLB ON Surplus course1-GAD-1 PDFRama KrishnaNoch keine Bewertungen
- Salient FeaturesDokument2 SeitenSalient FeaturesRama KrishnaNoch keine Bewertungen
- 1.Slrb DesignDokument44 Seiten1.Slrb DesignRama KrishnaNoch keine Bewertungen
- 1.Slrb DesignDokument44 Seiten1.Slrb DesignRama KrishnaNoch keine Bewertungen
- HCC DLB PIER 44.687 Final Approved 301106 ModelDokument1 SeiteHCC DLB PIER 44.687 Final Approved 301106 ModelRama KrishnaNoch keine Bewertungen
- Lower Pen GangaDokument1 SeiteLower Pen GangaRama KrishnaNoch keine Bewertungen
- 2.SLB ON Surplus course1-GAD-1 PDFDokument1 Seite2.SLB ON Surplus course1-GAD-1 PDFRama KrishnaNoch keine Bewertungen
- 3.Slb Across Local Stream Sections-Dwg-2Dokument1 Seite3.Slb Across Local Stream Sections-Dwg-2Rama KrishnaNoch keine Bewertungen
- 4 EstimateDokument4 Seiten4 EstimateRama KrishnaNoch keine Bewertungen
- To The President, IDEA Association Dear SirDokument2 SeitenTo The President, IDEA Association Dear SirRama KrishnaNoch keine Bewertungen
- TNGO RepresentationDokument3 SeitenTNGO RepresentationRama KrishnaNoch keine Bewertungen
- Proceedings of National Seminar - REDECON 2005 Roller Compacted Concrete DamsDokument17 SeitenProceedings of National Seminar - REDECON 2005 Roller Compacted Concrete DamsRama KrishnaNoch keine Bewertungen
- 260-276 ConstructionDokument17 Seiten260-276 ConstructionRama KrishnaNoch keine Bewertungen
- Netpro Operation Manual 2k0 4k0 VaDokument20 SeitenNetpro Operation Manual 2k0 4k0 VaDanny Dan100% (2)
- Control Gear Fluorescent Electronic EB-ECONOMY Electronic Ballasts For TLD LampsDokument6 SeitenControl Gear Fluorescent Electronic EB-ECONOMY Electronic Ballasts For TLD LampsGary LauNoch keine Bewertungen
- The International Organization For Standardization (ISO) and Its Impact On Business PerformanceDokument6 SeitenThe International Organization For Standardization (ISO) and Its Impact On Business PerformanceМаринаNoch keine Bewertungen
- Total Quality Management ManualDokument55 SeitenTotal Quality Management ManualjaminkwadNoch keine Bewertungen
- Ultimate Windows Tweaker 4 For Windows 10Dokument4 SeitenUltimate Windows Tweaker 4 For Windows 10lehaphuong03Noch keine Bewertungen
- Objective: TH STDokument3 SeitenObjective: TH STAmzal AhamedNoch keine Bewertungen
- RX RVRDokument7 SeitenRX RVRpcatruongNoch keine Bewertungen
- North Riser Down Concise TitleDokument1 SeiteNorth Riser Down Concise TitleCosphiiiNoch keine Bewertungen
- Apc7900 PDFDokument186 SeitenApc7900 PDFhalasz_evaNoch keine Bewertungen
- Resume Amit BhagwatDokument5 SeitenResume Amit Bhagwatabh93071046100% (3)
- Web Design I: Course DescriptionDokument7 SeitenWeb Design I: Course DescriptionGrantham UniversityNoch keine Bewertungen
- RC EXAM ELEC10 Electronic Devices and Circuits LC CircuitsDokument2 SeitenRC EXAM ELEC10 Electronic Devices and Circuits LC CircuitsaljamierNoch keine Bewertungen
- Unit-I DW - ArchitectureDokument96 SeitenUnit-I DW - ArchitectureHarish Babu100% (1)
- AC02 SolDokument135 SeitenAC02 SolsfundsNoch keine Bewertungen
- Leica Geosystems TPS Comparison Chart 1120 en LRDokument1 SeiteLeica Geosystems TPS Comparison Chart 1120 en LRChristian Guillmar Huanca OscoNoch keine Bewertungen
- Bank of Baroda BankingApplicationDokument45 SeitenBank of Baroda BankingApplicationprateekNoch keine Bewertungen
- WachsDokument64 SeitenWachsJorgeNoch keine Bewertungen
- AI Sentiment Analysis of YouTube CommentsDokument18 SeitenAI Sentiment Analysis of YouTube CommentsRey NeshNoch keine Bewertungen
- Spartan - 6 Project Card: User ManualDokument81 SeitenSpartan - 6 Project Card: User ManualunchalliNoch keine Bewertungen
- Inspiron 15 3552 Laptop Service Manual en UsDokument68 SeitenInspiron 15 3552 Laptop Service Manual en UsVladimir DelgadoNoch keine Bewertungen
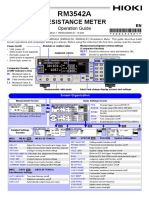
- Resistance Meter: Operation GuideDokument2 SeitenResistance Meter: Operation GuideEko SutjiptoNoch keine Bewertungen
- The Term Telecommunication Means Communication at A DistanceDokument2 SeitenThe Term Telecommunication Means Communication at A DistanceAnonymous MXgopYDENoch keine Bewertungen
- Worked Example Earthing CalculationDokument6 SeitenWorked Example Earthing CalculationMustafa KamalNoch keine Bewertungen
- Having 3 October 2017 To Still As A Firmware Engineer in Powrtec Energy Pvt. LTDDokument3 SeitenHaving 3 October 2017 To Still As A Firmware Engineer in Powrtec Energy Pvt. LTDAbhishek MishraNoch keine Bewertungen
- Laura Cooper - ResumeDokument3 SeitenLaura Cooper - ResumelaurahubbNoch keine Bewertungen
- TCS Prep Camp DBMSDokument120 SeitenTCS Prep Camp DBMSfrzi frziNoch keine Bewertungen
- Alarms and Error Codes 88 SeriesDokument40 SeitenAlarms and Error Codes 88 SeriesOzgyur MehmedovNoch keine Bewertungen