Das könnte Ihnen auch gefallen
- Modeling of Wind Turbines Based On DFIGDokument8 SeitenModeling of Wind Turbines Based On DFIGAida AdylbekovaNoch keine Bewertungen
- ReportsDokument23 SeitenReportschirag goyalNoch keine Bewertungen
- 2nd Control of Single-PhaseDokument37 Seiten2nd Control of Single-PhaseCaptain GamerNoch keine Bewertungen
- Load Frequency Control of Multi-Microgrid System Considering Renewable Energy Sources Using Grey Wolf OptimizationDokument21 SeitenLoad Frequency Control of Multi-Microgrid System Considering Renewable Energy Sources Using Grey Wolf Optimizationsuresh_velamuriNoch keine Bewertungen
- Virtual Inertia Adaptive Control of A Doubly Fed IDokument16 SeitenVirtual Inertia Adaptive Control of A Doubly Fed IMekonnen ShewaregaNoch keine Bewertungen
- Blaabjerg, F. Teodorescu, R. Liserre, M. Timbus, A.V. - Overview of Control and Grid Synchronization For DistributDokument12 SeitenBlaabjerg, F. Teodorescu, R. Liserre, M. Timbus, A.V. - Overview of Control and Grid Synchronization For DistributPhạm Văn TưởngNoch keine Bewertungen
- Grid-Connected Wind-PhotovoltaicDokument70 SeitenGrid-Connected Wind-PhotovoltaicGreenCornerTech Nlr100% (1)
- Optimize KSA Commercial PV SystemDokument18 SeitenOptimize KSA Commercial PV SystemHiyam HishamNoch keine Bewertungen
- GS381ijatesDokument9 SeitenGS381ijatesSHARJEEL MUNAWARNoch keine Bewertungen
- Review Paper - 2 - 1Dokument6 SeitenReview Paper - 2 - 1iaset123Noch keine Bewertungen
- PMSG Wind Energy Conversion Systems ZSIDokument12 SeitenPMSG Wind Energy Conversion Systems ZSIIJRASETPublicationsNoch keine Bewertungen
- Automatic Generation Control of Interconnected Power System With Diverse Sources of Power GenerationDokument15 SeitenAutomatic Generation Control of Interconnected Power System With Diverse Sources of Power GenerationVahid SadeghiNoch keine Bewertungen
- Alireza 2014Dokument9 SeitenAlireza 2014AmirKhanNoch keine Bewertungen
- Design and Implementation of Fuzzy-PID Controller With Derivative Filter For AGC of Two-Area Interconnected Hybrid Power SystemDokument15 SeitenDesign and Implementation of Fuzzy-PID Controller With Derivative Filter For AGC of Two-Area Interconnected Hybrid Power SystemVani TiwariNoch keine Bewertungen
- Improving Dynamic Performance of Wind Energy Conversion Systems Using Fuzzy-Based Hysteresis Current-Controlled Superconducting Magnetic Energy StorageDokument10 SeitenImproving Dynamic Performance of Wind Energy Conversion Systems Using Fuzzy-Based Hysteresis Current-Controlled Superconducting Magnetic Energy StorageNch NMNoch keine Bewertungen
- Load Frequency Control of Interconnected Restructured Power System Along With DFIG and Coordinated Operation of TCPS-SMESDokument6 SeitenLoad Frequency Control of Interconnected Restructured Power System Along With DFIG and Coordinated Operation of TCPS-SMESCristina MendozaNoch keine Bewertungen
- Abstract Raj KishanDokument4 SeitenAbstract Raj KishanShreya SinghNoch keine Bewertungen
- Economic Dispatch For A Microgrid Considering Renewable Energy Cost FunctionsDokument7 SeitenEconomic Dispatch For A Microgrid Considering Renewable Energy Cost FunctionsibtihalislamNoch keine Bewertungen
- Dynamic Modeling and Control of Renewable Energy Hybrid SystemsDokument6 SeitenDynamic Modeling and Control of Renewable Energy Hybrid SystemsisraelNoch keine Bewertungen
- Wand Hare 2015Dokument11 SeitenWand Hare 2015niranjan_meharNoch keine Bewertungen
- Janssen2016 Jenn2Dokument8 SeitenJanssen2016 Jenn2Anonymous XVZBqqYTkNoch keine Bewertungen
- Micro-Grid Modeling and ControlDokument24 SeitenMicro-Grid Modeling and Controldebjyoti chatterjeeNoch keine Bewertungen
- Frequency Stabilization of Isolated and Grid Connected Hybrid Power System ModelsDokument15 SeitenFrequency Stabilization of Isolated and Grid Connected Hybrid Power System Modelssuresh_velamuriNoch keine Bewertungen
- Sustainability 11 07209Dokument16 SeitenSustainability 11 07209Mihir RanaNoch keine Bewertungen
- Technoeconomic Assessment of A Hybrid Solar/wind Installation For Electrical Energy SavingDokument7 SeitenTechnoeconomic Assessment of A Hybrid Solar/wind Installation For Electrical Energy SavingResearcherzNoch keine Bewertungen
- Optimal Sizing of Hybrid Wind/PV Plant for Power GridDokument9 SeitenOptimal Sizing of Hybrid Wind/PV Plant for Power Gridawhan0% (1)
- Research PaperDokument8 SeitenResearch PaperkingNoch keine Bewertungen
- Abstrac 1Dokument10 SeitenAbstrac 1kkkNoch keine Bewertungen
- National and Regional Power PlanningDokument43 SeitenNational and Regional Power PlanningrahulNoch keine Bewertungen
- Role of Power Electronics in Renewable Energy Resources: Research ProposalDokument6 SeitenRole of Power Electronics in Renewable Energy Resources: Research ProposalAyesha MughalNoch keine Bewertungen
- An Assessment of The Impact of Wind Generation On Frequency ControlDokument9 SeitenAn Assessment of The Impact of Wind Generation On Frequency ControlNadil AminNoch keine Bewertungen
- Hybrid Power Generation Using Back To Back Voltage Source ConvertersDokument9 SeitenHybrid Power Generation Using Back To Back Voltage Source ConvertersGreenCornerTech NlrNoch keine Bewertungen
- Regular Paper Efficient AC-DC-AC Converter For Operation of Variable Speed Small Scale Hydro Power Generation SchemesDokument20 SeitenRegular Paper Efficient AC-DC-AC Converter For Operation of Variable Speed Small Scale Hydro Power Generation SchemesNguyen Van QuyenNoch keine Bewertungen
- Edas Final-1570034251Dokument13 SeitenEdas Final-1570034251martinv564Noch keine Bewertungen
- Energies: FPGA-Based Controller For A Hybrid Grid-Connected PV/Wind/Battery Power System With AC LoadDokument17 SeitenEnergies: FPGA-Based Controller For A Hybrid Grid-Connected PV/Wind/Battery Power System With AC LoadmohanNoch keine Bewertungen
- IET Generation Transmission Distribution ResearchDokument11 SeitenIET Generation Transmission Distribution ResearchChristian JimenezNoch keine Bewertungen
- Hybrid Power Generation System: Gagari Deb, Ramananda Paul, and Sudip DasDokument4 SeitenHybrid Power Generation System: Gagari Deb, Ramananda Paul, and Sudip Dasdjamel eddineNoch keine Bewertungen
- Supervisor Control For A Stand-Alone Hybrid Generation System Using Wind and Photovoltaic EnergyDokument8 SeitenSupervisor Control For A Stand-Alone Hybrid Generation System Using Wind and Photovoltaic EnergyMelissa MillerNoch keine Bewertungen
- Grid-Connected PV-Wind-Battery Based Multi-Input Transformer Coupled Bidirectional DC-DC Converter For Household ApplicationsDokument4 SeitenGrid-Connected PV-Wind-Battery Based Multi-Input Transformer Coupled Bidirectional DC-DC Converter For Household ApplicationsIJRASETPublicationsNoch keine Bewertungen
- Fuzzy Logic MPPT Controller With Energy Management System For Solar-Wind-Battery-Diesel Hybrid Power SystemDokument11 SeitenFuzzy Logic MPPT Controller With Energy Management System For Solar-Wind-Battery-Diesel Hybrid Power SystemSebastin AshokNoch keine Bewertungen
- Techno-Economic Valuation and Optimization of Integrated Photovoltaic/wind Energy Conversion SystemDokument14 SeitenTechno-Economic Valuation and Optimization of Integrated Photovoltaic/wind Energy Conversion SystemDaneMauriceRovedilloNoch keine Bewertungen
- Automatic Generation Control of Hydro-Thermal System Deregulated EnvironmentDokument6 SeitenAutomatic Generation Control of Hydro-Thermal System Deregulated Environmentapi-3697505Noch keine Bewertungen
- Load Frequency Control of Hydro and Nuclear Power System by PI & GA ControllerDokument6 SeitenLoad Frequency Control of Hydro and Nuclear Power System by PI & GA Controllerijsret100% (1)
- Impact of Distributed Generations With Energy Storage Devices On The Electric GridDokument8 SeitenImpact of Distributed Generations With Energy Storage Devices On The Electric GridAhmed WestministerNoch keine Bewertungen
- Open-Circuit Switch-Fault Tolerant Control of A Modified Boost DC-DC Converter For Alternative Energy SystemsDokument10 SeitenOpen-Circuit Switch-Fault Tolerant Control of A Modified Boost DC-DC Converter For Alternative Energy Systemsjeos20132013Noch keine Bewertungen
- Multi-Mode Control Strategy For A Stand-Alone Wind Energy ConversionDokument19 SeitenMulti-Mode Control Strategy For A Stand-Alone Wind Energy ConversionBahija KOUHAILNoch keine Bewertungen
- Power Quality Analysis of A Grid ConnectDokument13 SeitenPower Quality Analysis of A Grid Connecthamza malikNoch keine Bewertungen
- Load Frequency Control in Power SystemsDokument16 SeitenLoad Frequency Control in Power SystemsPavan uttej RavvaNoch keine Bewertungen
- Conclusion and Future Scope of Hybrid Power System with FACTS DevicesDokument4 SeitenConclusion and Future Scope of Hybrid Power System with FACTS DevicesHamxa AmeerNoch keine Bewertungen
- Real-Time Analysis of The Control Structure and Management Functions of A Hybrid Microgrid SystemDokument6 SeitenReal-Time Analysis of The Control Structure and Management Functions of A Hybrid Microgrid SystemJitender KaushalNoch keine Bewertungen
- Smart GridDokument10 SeitenSmart GridAnand SreekumarNoch keine Bewertungen
- Sustainability 13 00389Dokument17 SeitenSustainability 13 00389goldenmagic1314Noch keine Bewertungen
- Modeling, Control, and Dynamic Performance Analysis of A Reverse Osmosis Desalination Plant Integrated Within Hybrid Energy SystemsDokument41 SeitenModeling, Control, and Dynamic Performance Analysis of A Reverse Osmosis Desalination Plant Integrated Within Hybrid Energy Systemswatersoul.nNoch keine Bewertungen
- (Type The Document Title) : Chapter No. Title Page No. 1Dokument31 Seiten(Type The Document Title) : Chapter No. Title Page No. 1Rajasekhar MosuruNoch keine Bewertungen
- RE Principles - L2Dokument9 SeitenRE Principles - L2omarNoch keine Bewertungen
- 05 Smartgreens 2013 17 CRDokument10 Seiten05 Smartgreens 2013 17 CRIsmael MinchalaNoch keine Bewertungen
- Palma Behnke2013Dokument11 SeitenPalma Behnke2013Itamar Peñaloza MoránNoch keine Bewertungen
- Challenges Integrating Distributed Energy Storage Smart GridDokument6 SeitenChallenges Integrating Distributed Energy Storage Smart GridAlif Imran MohamedNoch keine Bewertungen
- Distributed Power Resources: Operation and Control of Connecting to the GridVon EverandDistributed Power Resources: Operation and Control of Connecting to the GridNoch keine Bewertungen
- Fidic Dec CourseDokument2 SeitenFidic Dec CourseMohammad M. ShahbaziNoch keine Bewertungen
- Anexo 9 Puraspec 7151Dokument7 SeitenAnexo 9 Puraspec 7151Edgar Hector GarciaNoch keine Bewertungen
- Chap 14 PDFDokument22 SeitenChap 14 PDFnelson escuderoNoch keine Bewertungen
- APTRANSCO SSR 2010-11 Rates for Transmission Line and Substation WorksDokument50 SeitenAPTRANSCO SSR 2010-11 Rates for Transmission Line and Substation WorksBalaji Naik100% (2)
- IDEN LAB RSS 26 supports new models and codeplug structuresDokument5 SeitenIDEN LAB RSS 26 supports new models and codeplug structuresMario Ivan MartinezNoch keine Bewertungen
- Customizing The E-M1 MK - II PDFDokument55 SeitenCustomizing The E-M1 MK - II PDFhumboldtNoch keine Bewertungen
- 1 - 2 - Advances in Vehicle Design - John FentonDokument187 Seiten1 - 2 - Advances in Vehicle Design - John Fentonenecatalin90Noch keine Bewertungen
- Chapter 4 - Terminal Facility Requirements and AlternativesDokument25 SeitenChapter 4 - Terminal Facility Requirements and AlternativesBenito MosesNoch keine Bewertungen
- Eero SaarinenDokument21 SeitenEero SaarinenAngella02100% (1)
- (Chemometrics series) Fred H. Walters, Lloyd R. Parker Jr, Stephen L. Morgan, Stanley N. Deming-Sequential simplex optimization_ a technique for improving quality and productivity in research, develo.pdfDokument403 Seiten(Chemometrics series) Fred H. Walters, Lloyd R. Parker Jr, Stephen L. Morgan, Stanley N. Deming-Sequential simplex optimization_ a technique for improving quality and productivity in research, develo.pdfUDAYAN SHAHNoch keine Bewertungen
- Hill-Rom Basic Care Bed - Service ManualDokument160 SeitenHill-Rom Basic Care Bed - Service Manualrenatozimermann100% (2)
- Abaqus Example Problems Manual: Abaqus Version 6.6 ID: Printed OnDokument572 SeitenAbaqus Example Problems Manual: Abaqus Version 6.6 ID: Printed OnmehtabpathanNoch keine Bewertungen
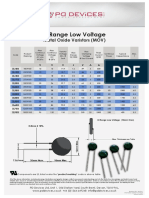
- D Range Low Voltage vPD1 PDFDokument1 SeiteD Range Low Voltage vPD1 PDFdeputadozeroNoch keine Bewertungen
- VII. 电厂术语 Power Plant Terminology - 燃料 FuelDokument4 SeitenVII. 电厂术语 Power Plant Terminology - 燃料 FuelSupri TmuhNoch keine Bewertungen
- DS TTL-232R PCBDokument16 SeitenDS TTL-232R PCBAlessio MasiniNoch keine Bewertungen
- SAP HANA Modeling GuideDokument266 SeitenSAP HANA Modeling GuideDamandeep Thakur100% (1)
- VW - tb.01!05!02 Diagnostic Trouble Code DTC P1603 Stored in DTCDokument3 SeitenVW - tb.01!05!02 Diagnostic Trouble Code DTC P1603 Stored in DTCSlobodanNoch keine Bewertungen
- Admiralty Manual of Seamanship PDFDokument876 SeitenAdmiralty Manual of Seamanship PDFPJ Apostol Alpacas100% (2)
- Accelerometer Test FixtureDokument7 SeitenAccelerometer Test FixtureMitchNoch keine Bewertungen
- CBTC Safety Management PDFDokument10 SeitenCBTC Safety Management PDFVeeresh T KumbarNoch keine Bewertungen
- Valve Material TypesDokument3 SeitenValve Material TypesimanadbNoch keine Bewertungen
- PO28184-3-3156WA-10 (SWING CHECK VALVE 3in CLASS 150 316SS)Dokument3 SeitenPO28184-3-3156WA-10 (SWING CHECK VALVE 3in CLASS 150 316SS)Francis Alberto Espinosa PerezNoch keine Bewertungen
- Project Report SIRIDokument14 SeitenProject Report SIRISumit Sharma67% (3)
- Swage HeightDokument3 SeitenSwage HeightAnkit JainNoch keine Bewertungen
- 10 Year LED Flasher - Hackster - IoDokument6 Seiten10 Year LED Flasher - Hackster - IoSergio Orellana PoggioNoch keine Bewertungen
- Special Considerations On The Selection of On-Load Tap-Changers For PSTs-A2 - 205 PDFDokument12 SeitenSpecial Considerations On The Selection of On-Load Tap-Changers For PSTs-A2 - 205 PDFAnonymous NGXdt2BxNoch keine Bewertungen
- At1 - Nusrat JerinDokument28 SeitenAt1 - Nusrat JerinNUSRAT JERINNoch keine Bewertungen
- MIG250C Inverter DC GMAW Welding Machine Operating ManualDokument25 SeitenMIG250C Inverter DC GMAW Welding Machine Operating Manualmaverick kitaroNoch keine Bewertungen
- Cgeit CourseDokument189 SeitenCgeit CourseKavithaRamchandran50% (2)
- Multiplayer Game Development With HTML5 - Sample ChapterDokument32 SeitenMultiplayer Game Development With HTML5 - Sample ChapterPackt PublishingNoch keine Bewertungen