Das könnte Ihnen auch gefallen
- Chapter 13 SolutionsDokument12 SeitenChapter 13 SolutionsIshdeep SinglaNoch keine Bewertungen
- SIW Antenna TutorialDokument24 SeitenSIW Antenna Tutorialbchaitanya55Noch keine Bewertungen
- Micro and Nano Robotic Manipulation Systems: Toshio Fukuda, Fumihito Arai, Lixin DongDokument12 SeitenMicro and Nano Robotic Manipulation Systems: Toshio Fukuda, Fumihito Arai, Lixin DongprasobhaNoch keine Bewertungen
- Module 4 - Part 2Dokument37 SeitenModule 4 - Part 2dharun mutaiahNoch keine Bewertungen
- Abstract Template Seminatec Renan FB (1626)Dokument3 SeitenAbstract Template Seminatec Renan FB (1626)Renan Daniel DomingosNoch keine Bewertungen
- Detection of Particulate Matter of Size 2.5 M With A Surface-Acoustic-Wave Sensor Combined With A Cyclone SeparatorDokument11 SeitenDetection of Particulate Matter of Size 2.5 M With A Surface-Acoustic-Wave Sensor Combined With A Cyclone Separatorprashant0768Noch keine Bewertungen
- Approches of NanoelectronicsDokument15 SeitenApproches of NanoelectronicsDramatic RockstarNoch keine Bewertungen
- Nanowires: Synthesis and ApplicationsDokument81 SeitenNanowires: Synthesis and ApplicationsDaniela MNoch keine Bewertungen
- Carbon Nanotube TransistorsDokument31 SeitenCarbon Nanotube TransistorsEkata NagarajNoch keine Bewertungen
- Honarparvar - Dna Based SemiconductorDokument54 SeitenHonarparvar - Dna Based Semiconductorlojanak63Noch keine Bewertungen
- Highly Sensitive UV Sensors Based On SMR OscillatorsDokument8 SeitenHighly Sensitive UV Sensors Based On SMR OscillatorsMinaNoch keine Bewertungen
- Nanoelectronics: Tamesh Submitted To: 10BTD5060161 Er. Ankush Kapoor Electronics and Communication Email IdDokument11 SeitenNanoelectronics: Tamesh Submitted To: 10BTD5060161 Er. Ankush Kapoor Electronics and Communication Email IdVikram GuleriaNoch keine Bewertungen
- Pierced Sensor For A Nano-Microscope (NMSC) : R. Sklyar Verchratskogo St. 15-1, Lviv 79010 UkraineDokument4 SeitenPierced Sensor For A Nano-Microscope (NMSC) : R. Sklyar Verchratskogo St. 15-1, Lviv 79010 UkraineFrontiers0% (1)
- Nanobarras de ZnODokument4 SeitenNanobarras de ZnOHugo LivasNoch keine Bewertungen
- Application of Arduino Module To Research in Surface PhysicsDokument6 SeitenApplication of Arduino Module To Research in Surface PhysicsLaith RiyadhNoch keine Bewertungen
- Design of Microstrip Rectangular Circular Array Antenna 1x 8 at Frequency of 1800 MHZ For Increase Power of 4G SignalDokument8 SeitenDesign of Microstrip Rectangular Circular Array Antenna 1x 8 at Frequency of 1800 MHZ For Increase Power of 4G SignalHELMY ADRIAN PUJIANTO Mahasiswa PNJNoch keine Bewertungen
- A.A Low Cost Spectrometer For NMR Measurements in The Earth S Magnetic Field PDFDokument9 SeitenA.A Low Cost Spectrometer For NMR Measurements in The Earth S Magnetic Field PDFDejan CorovicNoch keine Bewertungen
- Design of Dual-Band Transparent Antenna by Using Nano-Structured Thin Film Coating TechnologyDokument4 SeitenDesign of Dual-Band Transparent Antenna by Using Nano-Structured Thin Film Coating TechnologyFahd SaadNoch keine Bewertungen
- T80 UV-Vis Spectrophotometer Data SheetDokument4 SeitenT80 UV-Vis Spectrophotometer Data SheetRashid AzizNoch keine Bewertungen
- A Precision, Low-Cost Vibrating Sample Magnetometer: Current Science July 2000Dokument12 SeitenA Precision, Low-Cost Vibrating Sample Magnetometer: Current Science July 2000Umair GulNoch keine Bewertungen
- Nanobridge Technology: Applications of A NanobridgeDokument2 SeitenNanobridge Technology: Applications of A Nanobridge조현민Noch keine Bewertungen
- Moore's Law Forever?: Mark Lundstrom Purdue University Network For Computational Nanotechnology West Lafayette, IN USADokument37 SeitenMoore's Law Forever?: Mark Lundstrom Purdue University Network For Computational Nanotechnology West Lafayette, IN USAAadil ShNoch keine Bewertungen
- RF Pulse Amplifier For CVD-diamond Particle Detectors: February 2021Dokument9 SeitenRF Pulse Amplifier For CVD-diamond Particle Detectors: February 2021kernexNoch keine Bewertungen
- Compact UWB Wearable Antenna with Improved Bandwidth and Low SARDokument19 SeitenCompact UWB Wearable Antenna with Improved Bandwidth and Low SARNitin Suyan PanchalNoch keine Bewertungen
- Laser Technique DifferentDokument2 SeitenLaser Technique DifferentGoutam Kumar DebNoch keine Bewertungen
- 3 - Photoresist TechnologyDokument87 Seiten3 - Photoresist TechnologyLoiLeVanNoch keine Bewertungen
- Carbon Nanotube Transistors For Biosensing ApplicationsDokument13 SeitenCarbon Nanotube Transistors For Biosensing Applicationsrjc030012939Noch keine Bewertungen
- Tns 2009 2012426Dokument9 SeitenTns 2009 2012426ADITYA SHARMANoch keine Bewertungen
- 0544 11th Icnde Paper - Implementation of Special Pa Ut Techniques For Welds in Thick Wall Components - 2015Dokument10 Seiten0544 11th Icnde Paper - Implementation of Special Pa Ut Techniques For Welds in Thick Wall Components - 2015Rupam BaruahNoch keine Bewertungen
- Praktikum - Anleitung Tieftemperatur STMDokument16 SeitenPraktikum - Anleitung Tieftemperatur STMFranz FischerNoch keine Bewertungen
- NanotechnologyDokument108 SeitenNanotechnologyRaajeswaran BaskaranNoch keine Bewertungen
- nn9b04898 Si 001Dokument18 Seitennn9b04898 Si 001NamNoch keine Bewertungen
- Wireless NanotechnologyDokument8 SeitenWireless NanotechnologymssprasadNoch keine Bewertungen
- IQScanner-i GeneralDokument8 SeitenIQScanner-i GeneralDeva RajanNoch keine Bewertungen
- Performance of Textile Antenna Using Two Layers of Strip Line and Round-Off Circular PatchDokument3 SeitenPerformance of Textile Antenna Using Two Layers of Strip Line and Round-Off Circular PatchJesus AltamiranoNoch keine Bewertungen
- First Time User Guide To OMEN Nanowire : Network For Computational Nanotechnology (NCN)Dokument21 SeitenFirst Time User Guide To OMEN Nanowire : Network For Computational Nanotechnology (NCN)Jenifer SalazarNoch keine Bewertungen
- Introduction On CarbonNanotubesDokument13 SeitenIntroduction On CarbonNanotubesmanuieeeNoch keine Bewertungen
- MCNPCode ATD SLRI 140926 PDFDokument85 SeitenMCNPCode ATD SLRI 140926 PDFNamwan .CNoch keine Bewertungen
- Toqa IntrodactionDokument30 SeitenToqa IntrodactionToqa SulaimanNoch keine Bewertungen
- Nanomaterials - Synthesis and CharacterizationDokument115 SeitenNanomaterials - Synthesis and CharacterizationSoumyadeep BhattacharyyaNoch keine Bewertungen
- Confrontamientos de MemoriasDokument36 SeitenConfrontamientos de MemoriasScott Backster ClarckNoch keine Bewertungen
- An Introduction To Nanotechnology - 240122 - 213407Dokument10 SeitenAn Introduction To Nanotechnology - 240122 - 213407Luis Enrique Gomez MorenoNoch keine Bewertungen
- What Is NanophysicsDokument24 SeitenWhat Is Nanophysicsmhd22Noch keine Bewertungen
- NASA 160431main Fact Sheet NICMOSDokument2 SeitenNASA 160431main Fact Sheet NICMOSNASAdocumentsNoch keine Bewertungen
- Compact UWB Wearable Antenna: Conference PaperDokument5 SeitenCompact UWB Wearable Antenna: Conference PaperRam MurthyNoch keine Bewertungen
- 2021 Microstrip Antenna Design With Array Rectangular Patch 2x2 For Ship Radar at 2.2 GHZDokument9 Seiten2021 Microstrip Antenna Design With Array Rectangular Patch 2x2 For Ship Radar at 2.2 GHZBambang Bagus HariantoNoch keine Bewertungen
- Carbon Based Smart System For Wireless Application: Deliverable D2.2 Report On Design of The CNT Based RF SwitchDokument17 SeitenCarbon Based Smart System For Wireless Application: Deliverable D2.2 Report On Design of The CNT Based RF Switchತೆಜಸ್ವ ವೀರಭದ್ರೈಯNoch keine Bewertungen
- Evaluation of The Technical Condition of The Active Part of The High Power Transformer Based On Measurements and Analysis of Vibroacoustic SignalsDokument8 SeitenEvaluation of The Technical Condition of The Active Part of The High Power Transformer Based On Measurements and Analysis of Vibroacoustic SignalsAHMED ALSHAMMARINoch keine Bewertungen
- Introduction to Nanotechnology - History, Definition, Methodology, Applications and ChallengesDokument35 SeitenIntroduction to Nanotechnology - History, Definition, Methodology, Applications and ChallengeschandruuncleNoch keine Bewertungen
- Conformal Wearable Monopole Antenna Backed by A Compact EBG Structure For Body Area NetworksDokument3 SeitenConformal Wearable Monopole Antenna Backed by A Compact EBG Structure For Body Area NetworksnikitaNoch keine Bewertungen
- Anderson 1999 0168Dokument3 SeitenAnderson 1999 0168Particle Beam Physics LabNoch keine Bewertungen
- Nanowire-Decorated Microscale Metallic EDokument4 SeitenNanowire-Decorated Microscale Metallic EmajdanekNoch keine Bewertungen
- ScienceDokument2 SeitenScienceMike PoznerNoch keine Bewertungen
- Device Parameter Extraction of 14Nm, 10nmand 7Nm FinfetDokument43 SeitenDevice Parameter Extraction of 14Nm, 10nmand 7Nm FinfetKrisumraj PurkaitNoch keine Bewertungen
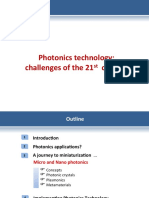
- M1 Photonic TechnologyDokument71 SeitenM1 Photonic TechnologyCeline Dian SitorusNoch keine Bewertungen
- Carbon Nanotube and Polyacrylonitrile Nanofiber Devices For Sensing ApplicationsDokument7 SeitenCarbon Nanotube and Polyacrylonitrile Nanofiber Devices For Sensing ApplicationsPardeshi SoniNoch keine Bewertungen
- Unit - 5 NDTDokument7 SeitenUnit - 5 NDTRAJESH. RNoch keine Bewertungen
- ESAFORM2008 ProceedingsDokument82 SeitenESAFORM2008 Proceedingsnyilmaz72411Noch keine Bewertungen
- "Nano Simulator For Nano-Scale Mosfet" by Pragya Kushwaha, Panjab University (2009-2011)Dokument25 Seiten"Nano Simulator For Nano-Scale Mosfet" by Pragya Kushwaha, Panjab University (2009-2011)pragya18927710% (1)
- Wireless Communications Design Handbook: Space Interference: Aspects of Noise, Interference and Environmental ConcernsVon EverandWireless Communications Design Handbook: Space Interference: Aspects of Noise, Interference and Environmental ConcernsBewertung: 5 von 5 Sternen5/5 (1)
- David SM Chapter 2 PPT by Fred R David Stategic Management Concepts and Cases 13th EditionDokument38 SeitenDavid SM Chapter 2 PPT by Fred R David Stategic Management Concepts and Cases 13th EditionSyed Haris Ali0% (2)
- Introduction to Algorithms: Skip ListsDokument3 SeitenIntroduction to Algorithms: Skip ListsOvaiz AliNoch keine Bewertungen
- Linked Lists: by Sadaf Iqbal BehlimDokument23 SeitenLinked Lists: by Sadaf Iqbal BehlimOvaiz AliNoch keine Bewertungen
- Ytha Yu, Charles Marut-Assembly Language Programming Organization of The IBM PC (1992)Dokument551 SeitenYtha Yu, Charles Marut-Assembly Language Programming Organization of The IBM PC (1992)harini90% (72)
- Lab 1 (Software - Intro)Dokument13 SeitenLab 1 (Software - Intro)Ovaiz AliNoch keine Bewertungen
- Answers 2 Reviews and ExercisesDokument26 SeitenAnswers 2 Reviews and ExercisesNaw Safrin SattarNoch keine Bewertungen
- Schedule of Rate For Standard Stock Materials Common SR 2021-22 (11 KV System)Dokument161 SeitenSchedule of Rate For Standard Stock Materials Common SR 2021-22 (11 KV System)sagar mukulNoch keine Bewertungen
- About Soda Ash - ANSACDokument2 SeitenAbout Soda Ash - ANSAChabib1234Noch keine Bewertungen
- Work Power Energy JEE TestDokument6 SeitenWork Power Energy JEE TestAman RolandNoch keine Bewertungen
- Benzocaine Syntheisi Via Fischer EsterificationDokument7 SeitenBenzocaine Syntheisi Via Fischer EsterificationXiang Yu100% (7)
- Precipitation Titrimetry AnalysisDokument29 SeitenPrecipitation Titrimetry AnalysisPraveen KumarNoch keine Bewertungen
- Fire Resistant Fluid Study on Deterioration of Physicochemical PropertiesDokument34 SeitenFire Resistant Fluid Study on Deterioration of Physicochemical Propertiesgolden430Noch keine Bewertungen
- 11.VIA Group ElementsDokument3 Seiten11.VIA Group ElementsANIL KumarNoch keine Bewertungen
- k30 Euroline BisDokument16 Seitenk30 Euroline BiscyberquasitNoch keine Bewertungen
- Improved Control Valve Sizing For Multiphase FlowDokument10 SeitenImproved Control Valve Sizing For Multiphase FlowThitikorn WassanarpheernphongNoch keine Bewertungen
- Soil Erosion in the PhilippinesDokument51 SeitenSoil Erosion in the PhilippinesSHARON MANUELNoch keine Bewertungen
- Page 1 of 3: What To Expect When Being Asked Boiling Point Questions On ExamsDokument3 SeitenPage 1 of 3: What To Expect When Being Asked Boiling Point Questions On ExamsSulochana KoviNoch keine Bewertungen
- Skin Effect in Transmission Lines ExplainedDokument13 SeitenSkin Effect in Transmission Lines Explainedthilini100% (1)
- Gotuj Z Oliverem Chomikuj GryphonDokument3 SeitenGotuj Z Oliverem Chomikuj GryphonHajiNoch keine Bewertungen
- Mechanical EngineeringDokument23 SeitenMechanical EngineeringAditya ShindeNoch keine Bewertungen
- P131 Problem Set 1Dokument2 SeitenP131 Problem Set 1TyNoch keine Bewertungen
- 07 01 2024 JR Super60 NUCLEUS BT Jee Adv2021 P1 CTA 23 Q PaperDokument20 Seiten07 01 2024 JR Super60 NUCLEUS BT Jee Adv2021 P1 CTA 23 Q Paperzaid khanNoch keine Bewertungen
- The Effects of Rotary Kiln Operating Conditions and Design On Burden Heating Rates As Determined by A Mathematical Model of Rotary Kiln Heat Transfer PDFDokument9 SeitenThe Effects of Rotary Kiln Operating Conditions and Design On Burden Heating Rates As Determined by A Mathematical Model of Rotary Kiln Heat Transfer PDFSHRAVAN KUMARNoch keine Bewertungen
- Yyzzzz Fluidization - J.R. Van Ommen & N. Ellis - 2010Dokument25 SeitenYyzzzz Fluidization - J.R. Van Ommen & N. Ellis - 2010José Pedro Casagrande TrentínNoch keine Bewertungen
- Heat 1Dokument36 SeitenHeat 1ZainabNoch keine Bewertungen
- Basics of Luminescence & CathodeluminanceDokument91 SeitenBasics of Luminescence & CathodeluminanceShankari Nadupalli100% (1)
- Article 4 (Recovered)Dokument6 SeitenArticle 4 (Recovered)adriannatsNoch keine Bewertungen
- 02 Diffusivity - PPT (Read Only)Dokument20 Seiten02 Diffusivity - PPT (Read Only)dxdiag97Noch keine Bewertungen
- Topic 2 SimpleDistillationDokument52 SeitenTopic 2 SimpleDistillationJA NableNoch keine Bewertungen
- Data XRF ST14Dokument78 SeitenData XRF ST14Achmad Nabil ZulfaqarNoch keine Bewertungen
- High-Solids Epoxy Systems For Protective and Marine CoatingsDokument6 SeitenHigh-Solids Epoxy Systems For Protective and Marine CoatingsJuan Carlos Contreras CherresNoch keine Bewertungen
- Bulk Density and Tapped Density of Powders: The International Pharmacopoeia - Ninth Edition, 2019Dokument4 SeitenBulk Density and Tapped Density of Powders: The International Pharmacopoeia - Ninth Edition, 2019Khaled ZEMNINoch keine Bewertungen
- Enzymes .Dokument6 SeitenEnzymes .Nathan SsekamatteNoch keine Bewertungen
- Pascoe 2005Dokument7 SeitenPascoe 2005mohamadhosein mohamadiNoch keine Bewertungen
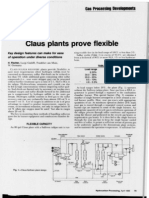
- Claus Plants Prove FlexibleDokument3 SeitenClaus Plants Prove Flexiblebakhtiari_afNoch keine Bewertungen
- Lehninger Biochem Ch 1-2 ReviewDokument13 SeitenLehninger Biochem Ch 1-2 ReviewHugo DuarteNoch keine Bewertungen