Das könnte Ihnen auch gefallen
- PSCAD IntroductionDokument72 SeitenPSCAD IntroductionksbwingsNoch keine Bewertungen
- Single Line Diagram Adw C Blri Ka DWG 001 - SLD - r04Dokument1 SeiteSingle Line Diagram Adw C Blri Ka DWG 001 - SLD - r04Design and Estimation DepartmentNoch keine Bewertungen
- Smps Transformer, Toroidal Winding Core (DC DC)Dokument12 SeitenSmps Transformer, Toroidal Winding Core (DC DC)Bảo BìnhNoch keine Bewertungen
- Methods for Increasing the Quality and Reliability of Power System Using FACTS DevicesVon EverandMethods for Increasing the Quality and Reliability of Power System Using FACTS DevicesNoch keine Bewertungen
- Service Manual (VGD 700-3K) 20050701Dokument35 SeitenService Manual (VGD 700-3K) 20050701Christian Tubay Macias100% (1)
- 4734 E EEM 4 4-3 Three-Phase Motor With Slip-Rings Slip-Ring Rotor 300WDokument17 Seiten4734 E EEM 4 4-3 Three-Phase Motor With Slip-Rings Slip-Ring Rotor 300WPlamen DimitrovNoch keine Bewertungen
- PDFDokument26 SeitenPDFramunitNoch keine Bewertungen
- A Flying-Capacitor Modular Multilevel ConverterDokument4 SeitenA Flying-Capacitor Modular Multilevel ConverterAna Paula Henn WaengaNoch keine Bewertungen
- Comparison of Total Harmonic Distortion of ModularDokument5 SeitenComparison of Total Harmonic Distortion of ModularRodovarNoch keine Bewertungen
- Energy Balancing Improvement of Modular Multilevel Converters Under Unbalanced Grid ConditionsDokument10 SeitenEnergy Balancing Improvement of Modular Multilevel Converters Under Unbalanced Grid ConditionsXiaoxiao LiuNoch keine Bewertungen
- Control and Experiment of ACACDokument8 SeitenControl and Experiment of ACACVamsi GaneshNoch keine Bewertungen
- Modelling and Control of The Modular Multilevel Converter (MMC)Dokument10 SeitenModelling and Control of The Modular Multilevel Converter (MMC)PunitNoch keine Bewertungen
- Modular Multilevel Converter-Based HVDC System: A Review: Punam B. Sao, U.G. BondeDokument5 SeitenModular Multilevel Converter-Based HVDC System: A Review: Punam B. Sao, U.G. BondeAkash AhireNoch keine Bewertungen
- Large Step Ratio DC-DC Converter Using Input-Series-Output-Parallel ConfigurationDokument12 SeitenLarge Step Ratio DC-DC Converter Using Input-Series-Output-Parallel ConfigurationArunavaNoch keine Bewertungen
- Design Guidelines of Circuit Parameters For Modular Multilevel Converter With H-Bridge CellDokument14 SeitenDesign Guidelines of Circuit Parameters For Modular Multilevel Converter With H-Bridge Cellp09el860Noch keine Bewertungen
- MMC_Based_Hybrid_Switched_Capacitor_DC-DC_ConverterDokument11 SeitenMMC_Based_Hybrid_Switched_Capacitor_DC-DC_ConverterJahangir AlamNoch keine Bewertungen
- A Novel Bidirectional T-Type Multilevel Inverter For Electric Vehicle ApplicationsDokument11 SeitenA Novel Bidirectional T-Type Multilevel Inverter For Electric Vehicle Applicationsfarid kerroucheNoch keine Bewertungen
- Multilevel Converter Applications in Renewable Energy SystemsDokument4 SeitenMultilevel Converter Applications in Renewable Energy Systemshamza shahbazNoch keine Bewertungen
- Pesgm2022 003569Dokument5 SeitenPesgm2022 003569Vedran PericNoch keine Bewertungen
- The Modular Multilevel Converter For High Step-Up Ratio DC-DC ConversionDokument12 SeitenThe Modular Multilevel Converter For High Step-Up Ratio DC-DC ConversionBHARADWAJ CHIVUKULANoch keine Bewertungen
- Buck Converter (H - L)Dokument31 SeitenBuck Converter (H - L)NelarapuMaheshNoch keine Bewertungen
- 16.prospects ofVoltage-Sourced Converters (VSC) Applications in DCTransmission SystemsDokument5 Seiten16.prospects ofVoltage-Sourced Converters (VSC) Applications in DCTransmission SystemsWahyu HarianjaNoch keine Bewertungen
- Reduced Switching-Frequency Modulation and Circulating Current Suppression For Modular Multilevel ConvertersDokument9 SeitenReduced Switching-Frequency Modulation and Circulating Current Suppression For Modular Multilevel ConvertersDebdeep SamajdarNoch keine Bewertungen
- Modelling and Control of Dual Input Boost ConverteDokument10 SeitenModelling and Control of Dual Input Boost ConverteDhinesh JeyandranNoch keine Bewertungen
- An Improved Ripple Suppression Method Based On Flying-Capacitor Modular Multilevel Converter For High Performance MV DriversDokument5 SeitenAn Improved Ripple Suppression Method Based On Flying-Capacitor Modular Multilevel Converter For High Performance MV DriversAna Paula Henn WaengaNoch keine Bewertungen
- Sensors 22 06402Dokument24 SeitenSensors 22 06402Masudur RahmanNoch keine Bewertungen
- Capacitor RIPPLE MMCDokument12 SeitenCapacitor RIPPLE MMCSandeep NarayananNoch keine Bewertungen
- IET Generation Trans Dist - 2022 - Tayyab - Active and Reactive Power Control of Grid Connected Single Phase AsymmetricalDokument13 SeitenIET Generation Trans Dist - 2022 - Tayyab - Active and Reactive Power Control of Grid Connected Single Phase AsymmetricalFARHAD ILAHI BakhshNoch keine Bewertungen
- Application of Modular Multilevel Converter in Medium Voltage High Power Permanent Magnet Synchronous Generator Wind Energy Conversion SystemsDokument10 SeitenApplication of Modular Multilevel Converter in Medium Voltage High Power Permanent Magnet Synchronous Generator Wind Energy Conversion SystemsAbu Bakr M. SaeedNoch keine Bewertungen
- Analysis and Simulation of A Multiple Input Interleaved Boost Converter For Renewable Energy ApplicationsDokument7 SeitenAnalysis and Simulation of A Multiple Input Interleaved Boost Converter For Renewable Energy ApplicationsChandra Sekhar Reddy GadeNoch keine Bewertungen
- MODULAR MULTILEVEL INVERTER WITH SELECTIVE VIRTUAL LOOP MAPPINGDokument4 SeitenMODULAR MULTILEVEL INVERTER WITH SELECTIVE VIRTUAL LOOP MAPPINGsyedNoch keine Bewertungen
- 1 s2.0 S0360544222033485 MainDokument21 Seiten1 s2.0 S0360544222033485 MainKostas GekasNoch keine Bewertungen
- Modeling and Simulation of A MMC-based Solid-State Transformer........ SpringerDokument13 SeitenModeling and Simulation of A MMC-based Solid-State Transformer........ SpringerKaumil ShahNoch keine Bewertungen
- Fast Simulation of MMC-HVDC Systems Using A Generalized Equivalent Circuit Model of MMCDokument7 SeitenFast Simulation of MMC-HVDC Systems Using A Generalized Equivalent Circuit Model of MMCas147Noch keine Bewertungen
- A Low Cost Flyback CCM Inverter For AC Module ApplicationDokument9 SeitenA Low Cost Flyback CCM Inverter For AC Module Applicationvinay kumarNoch keine Bewertungen
- Investigation of Capacitor Voltage Regulation in Modular Multilevel Converters With Staircase ModulationDokument10 SeitenInvestigation of Capacitor Voltage Regulation in Modular Multilevel Converters With Staircase ModulationkosmitoNoch keine Bewertungen
- Modeling Techniques For Dynamic and Steady-State Analysis of Modular Multilevel DC/DC ConvertersDokument9 SeitenModeling Techniques For Dynamic and Steady-State Analysis of Modular Multilevel DC/DC ConvertersBHARADWAJ CHIVUKULANoch keine Bewertungen
- MMC Avg DetailDokument8 SeitenMMC Avg Detailashuchary54Noch keine Bewertungen
- Control of HVDC Transmission System Based On MMC With Three-Level Flying Capacitor SubmoduleDokument22 SeitenControl of HVDC Transmission System Based On MMC With Three-Level Flying Capacitor SubmoduleAnand Parakkat Parambil100% (1)
- DC Link Capacitor Voltage Balancing in Three Level Neutral Point Clamped InverterDokument5 SeitenDC Link Capacitor Voltage Balancing in Three Level Neutral Point Clamped InvertermücahitNoch keine Bewertungen
- Cta 2701Dokument25 SeitenCta 2701pedroNoch keine Bewertungen
- Offshore Wind Farm Modeling Accuracy and Efficiency in MMC-Based Multiterminal HVDC ConnectionDokument11 SeitenOffshore Wind Farm Modeling Accuracy and Efficiency in MMC-Based Multiterminal HVDC Connectionengr.jahangeersoomroNoch keine Bewertungen
- Cao - S Jiang - F Z Peng - IEEE Transactions On Power Electronics - 2013Dokument11 SeitenCao - S Jiang - F Z Peng - IEEE Transactions On Power Electronics - 2013JonasSferreiraNoch keine Bewertungen
- Analysis and Design of Isolated SEPIC Converter With Greinacher Voltage Multiplier CellDokument8 SeitenAnalysis and Design of Isolated SEPIC Converter With Greinacher Voltage Multiplier CellBernardo AndresNoch keine Bewertungen
- Model Predictive Control For Single-Phase Switched-Capacitor Multilevel InvertersDokument16 SeitenModel Predictive Control For Single-Phase Switched-Capacitor Multilevel InvertersRodovarNoch keine Bewertungen
- Analysis and Design of Isolated SEPIC Converter With Greinacher Voltage Quadrupler Multiplier CellDokument6 SeitenAnalysis and Design of Isolated SEPIC Converter With Greinacher Voltage Quadrupler Multiplier CellBernardo AndresNoch keine Bewertungen
- Power Converters, Control, and Energy Management For Distributed GenerationDokument5 SeitenPower Converters, Control, and Energy Management For Distributed GenerationAbdelaziz IsmealNoch keine Bewertungen
- 3 Multilevel Converter-4Dokument20 Seiten3 Multilevel Converter-4Praveen GsNoch keine Bewertungen
- 94 Jicr April 2023Dokument7 Seiten94 Jicr April 2023Phani RamNoch keine Bewertungen
- Single-Inductor Multi-Output (SIMO) DC-DC Converters With High Light-Load Efficiency and Minimized Cross-Regulation For Portable DevicesDokument13 SeitenSingle-Inductor Multi-Output (SIMO) DC-DC Converters With High Light-Load Efficiency and Minimized Cross-Regulation For Portable DevicesNgô Gia HảiNoch keine Bewertungen
- Modeling and Simulation of Micro Grid System Based On Renewable Power Generation Units by Using Multilevel ConverterDokument5 SeitenModeling and Simulation of Micro Grid System Based On Renewable Power Generation Units by Using Multilevel ConverterPidikiti Surendra BabuNoch keine Bewertungen
- Thermal and Efficiency Analysis of Five-Level Multi-Level Clamped Multilevel Converter Considering Grid CodesDokument8 SeitenThermal and Efficiency Analysis of Five-Level Multi-Level Clamped Multilevel Converter Considering Grid CodesManga IndonesiaNoch keine Bewertungen
- Wide Input Voltage Range High Step-Up DC-DC Converter With Fault-Tolerant Operation CapabilityDokument6 SeitenWide Input Voltage Range High Step-Up DC-DC Converter With Fault-Tolerant Operation Capabilityjeos20132013Noch keine Bewertungen
- Electric Power Systems Research: SciencedirectDokument15 SeitenElectric Power Systems Research: SciencedirectBHARADWAJ CHIVUKULANoch keine Bewertungen
- Agamy, 2013Dokument6 SeitenAgamy, 2013EdsonNoch keine Bewertungen
- Half Bridge Converter Proposed for Battery ChargingDokument6 SeitenHalf Bridge Converter Proposed for Battery Chargingdavid bennyNoch keine Bewertungen
- Investigation of Zero Voltage Switching Capability For Bidirectional Series Resonant Converter Using Phase-Shift ModulationDokument17 SeitenInvestigation of Zero Voltage Switching Capability For Bidirectional Series Resonant Converter Using Phase-Shift ModulationPatil MounicareddyNoch keine Bewertungen
- Multicarrier - Based PWM Control Strategies For Five - Level CMLIDokument7 SeitenMulticarrier - Based PWM Control Strategies For Five - Level CMLIDharani DeviNoch keine Bewertungen
- Optimal Design of The Power Transformer With ANSYS Maxwell For Bidirectional Battery ChargerDokument9 SeitenOptimal Design of The Power Transformer With ANSYS Maxwell For Bidirectional Battery ChargerlordgtyNoch keine Bewertungen
- An Interleaved Flyback Inverter For Grid Connected Photovoltaic SystemsDokument7 SeitenAn Interleaved Flyback Inverter For Grid Connected Photovoltaic SystemsBastianHerreraBugueñoNoch keine Bewertungen
- Enumeration-Based Predictive Control For Buck DC-DC ConverterDokument5 SeitenEnumeration-Based Predictive Control For Buck DC-DC ConverterKannan KochumonNoch keine Bewertungen
- A Modular Multilevel DCDC Converter With FaultDokument15 SeitenA Modular Multilevel DCDC Converter With FaultZaheer AbbasNoch keine Bewertungen
- RCEEE2018-FCS-Model Predictive Control of Induction Motors Feed by MultilLevel Cascaded H-Bridge InverterDokument6 SeitenRCEEE2018-FCS-Model Predictive Control of Induction Motors Feed by MultilLevel Cascaded H-Bridge InverterNam Hoang ThanhNoch keine Bewertungen
- CASD 2017. FPGA-Based Fuzzy Sliding Mode Controller For DC Motor DriveDokument6 SeitenCASD 2017. FPGA-Based Fuzzy Sliding Mode Controller For DC Motor DriveNam Hoang ThanhNoch keine Bewertungen
- RCEEE2018 Programme BookDokument66 SeitenRCEEE2018 Programme BookNam Hoang ThanhNoch keine Bewertungen
- CASD 2017. Design and Evaluation of The Lower-Limb Robotic Orthosis For Gait Rehabilitation Actuated by Pneumatic Artificial MuscleDokument5 SeitenCASD 2017. Design and Evaluation of The Lower-Limb Robotic Orthosis For Gait Rehabilitation Actuated by Pneumatic Artificial MuscleNam Hoang ThanhNoch keine Bewertungen
- CASD 2017. Cascaded Control Using A State Feedback Controller With Position Integrator Terms For Elastic Joint RobotsDokument8 SeitenCASD 2017. Cascaded Control Using A State Feedback Controller With Position Integrator Terms For Elastic Joint RobotsNam Hoang ThanhNoch keine Bewertungen
- CASD 2017. Điều khiển dự báo động cơ tuyến tính đồng bộ kích thích vĩnh cửu sử dụng quy hoạch nhiều tham số và tuyến tính hóa chính xácDokument4 SeitenCASD 2017. Điều khiển dự báo động cơ tuyến tính đồng bộ kích thích vĩnh cửu sử dụng quy hoạch nhiều tham số và tuyến tính hóa chính xácNam Hoang ThanhNoch keine Bewertungen
- Casd 2017. A Simple Control Method For Rehabilitation ExoskeletonDokument6 SeitenCasd 2017. A Simple Control Method For Rehabilitation ExoskeletonNam Hoang ThanhNoch keine Bewertungen
- CASD 2017. Digital Control of Single Phase UPS Inverters Based On Discrete-Time State and Disturbance ObserverDokument6 SeitenCASD 2017. Digital Control of Single Phase UPS Inverters Based On Discrete-Time State and Disturbance ObserverNam Hoang ThanhNoch keine Bewertungen
- CASD 2017. Stability of Robust Nonlinear Model Predictive Control With Input Constraint and State - Dependent DisturbancesDokument6 SeitenCASD 2017. Stability of Robust Nonlinear Model Predictive Control With Input Constraint and State - Dependent DisturbancesNam Hoang ThanhNoch keine Bewertungen
- CASD 2017. Robust Fuzzy-Based Integral Sliding Mode Control For Dynamic SystemDokument9 SeitenCASD 2017. Robust Fuzzy-Based Integral Sliding Mode Control For Dynamic SystemNam Hoang ThanhNoch keine Bewertungen
- CASD 2017. It cannot be denied that robust model predictive control with input constraint have been playing an important role in nonlinear model analysis. A group of nonlinear model system under state – dependent disturbances and input constraint is approached by robust nonlinear model predictive control method. The investigated state space model is separated into linear part, mismatch model and state – dependent disturbances belonging L∞. Solving optimization problem of upper quadratic function of infinite horizon objective function with input constraint via LMIs [4] provide state – feedback control law to help state converge to origin. In this paper, in order to obtain robust stability condition, the proposed method must generates stability regions lying in feasibility regions which ensure the existence of solution. Additionally, these regions are able to contract after each sampling time to proof the robust stability of the system. Finally, the simulation results of the three dimenDokument5 SeitenCASD 2017. It cannot be denied that robust model predictive control with input constraint have been playing an important role in nonlinear model analysis. A group of nonlinear model system under state – dependent disturbances and input constraint is approached by robust nonlinear model predictive control method. The investigated state space model is separated into linear part, mismatch model and state – dependent disturbances belonging L∞. Solving optimization problem of upper quadratic function of infinite horizon objective function with input constraint via LMIs [4] provide state – feedback control law to help state converge to origin. In this paper, in order to obtain robust stability condition, the proposed method must generates stability regions lying in feasibility regions which ensure the existence of solution. Additionally, these regions are able to contract after each sampling time to proof the robust stability of the system. Finally, the simulation results of the three dimenNam Hoang ThanhNoch keine Bewertungen
- CASD 2017. Design and Implementation of Excitation Control System Based On Direct Lyapunov MethodDokument5 SeitenCASD 2017. Design and Implementation of Excitation Control System Based On Direct Lyapunov MethodNam Hoang ThanhNoch keine Bewertungen
- CASD 2017. Robust H-Infinity Backstepping Control Design of A Wheeled Inverted Pendulum SystemDokument5 SeitenCASD 2017. Robust H-Infinity Backstepping Control Design of A Wheeled Inverted Pendulum SystemNam Hoang ThanhNoch keine Bewertungen
- CASD 2017. Design and Implementation of Excitation Control System Based On Direct Lyapunov MethodDokument5 SeitenCASD 2017. Design and Implementation of Excitation Control System Based On Direct Lyapunov MethodNam Hoang ThanhNoch keine Bewertungen
- CASD 2017. Application of Factional Order PI Controller To Control 3-Phase PWM RectifierDokument6 SeitenCASD 2017. Application of Factional Order PI Controller To Control 3-Phase PWM RectifierNam Hoang ThanhNoch keine Bewertungen
- R16B TechEEEIVYearRevisedSyllabusDokument52 SeitenR16B TechEEEIVYearRevisedSyllabussundeep sNoch keine Bewertungen
- Effective EMI Filter PDFDokument10 SeitenEffective EMI Filter PDFkiran kumarNoch keine Bewertungen
- EEE 1218 Sessional On Analog ElectronicsDokument3 SeitenEEE 1218 Sessional On Analog ElectronicsAfiat KhanNoch keine Bewertungen
- A PWM Method for Reducing Switching LossesDokument7 SeitenA PWM Method for Reducing Switching Lossessiddhartha_anirban100% (1)
- Technologies For Electrical Power Conversion, Efficiency and Distribution, Methods and Processes by Mihail Hristov AntchevDokument348 SeitenTechnologies For Electrical Power Conversion, Efficiency and Distribution, Methods and Processes by Mihail Hristov AntchevWalter SánchezNoch keine Bewertungen
- Industrial ElectronicsDokument39 SeitenIndustrial ElectronicsGuruKPONoch keine Bewertungen
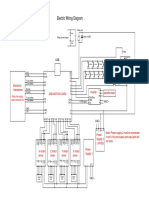
- Electric wiring diagram for CNC machineDokument1 SeiteElectric wiring diagram for CNC machineWilliams Ayala100% (2)
- Some Topologies of High Quality RectifiersDokument6 SeitenSome Topologies of High Quality RectifiersSatya NVNoch keine Bewertungen
- Half WaveDokument7 SeitenHalf WaveMaida PhysicistNoch keine Bewertungen
- Research Article: Nonlinear Control of Back-to-Back VSC-HVDC System Via Command-Filter BacksteppingDokument11 SeitenResearch Article: Nonlinear Control of Back-to-Back VSC-HVDC System Via Command-Filter BacksteppingFeodor RadilovNoch keine Bewertungen
- MCQ - AC Voltage ControllerDokument8 SeitenMCQ - AC Voltage ControllerrajuNoch keine Bewertungen
- What is a Rectifier ExplainedDokument10 SeitenWhat is a Rectifier ExplainedRutvikNoch keine Bewertungen
- BLDC Motor Control Design in MATLAB/SimulinkDokument5 SeitenBLDC Motor Control Design in MATLAB/SimulinkWilliam Javier Rosero VargasNoch keine Bewertungen
- Power Electronics Semiconductor DevicesDokument33 SeitenPower Electronics Semiconductor DevicesshrimanNoch keine Bewertungen
- THYRISTOR StudentDokument30 SeitenTHYRISTOR StudentgggggNoch keine Bewertungen
- Definition of Power Converters: F. Bordry and D. AgugliaDokument29 SeitenDefinition of Power Converters: F. Bordry and D. AgugliaL CHNoch keine Bewertungen
- DVR and DSTATCOMDokument7 SeitenDVR and DSTATCOMDINESHKUMARMCENoch keine Bewertungen
- Civil Engineering - یناتسراش ایرایزادنەئ: One Year Higher Diploma StudyDokument6 SeitenCivil Engineering - یناتسراش ایرایزادنەئ: One Year Higher Diploma StudyZhiwar oramariNoch keine Bewertungen
- Optimal Trajectory Control of LLC ResonantDokument9 SeitenOptimal Trajectory Control of LLC ResonantPavan Singh TomarNoch keine Bewertungen
- Sprabw0b PDFDokument19 SeitenSprabw0b PDFAshok KumarNoch keine Bewertungen
- Library File Description OrCAD PSpiceDokument5 SeitenLibrary File Description OrCAD PSpiceCarlos Roberto Amaya RodriguezNoch keine Bewertungen
- Functionarea IGCT Si IGBTDokument58 SeitenFunctionarea IGCT Si IGBTFaqRONoch keine Bewertungen
- HVDC Transmission Unit-3Dokument38 SeitenHVDC Transmission Unit-3Narendra KNoch keine Bewertungen
- Speed Control of BLDC Motor Using DSP: 1 4 1 JNTUH Hyderabad, India 2 JNTUH Hyderabad, IndiaDokument5 SeitenSpeed Control of BLDC Motor Using DSP: 1 4 1 JNTUH Hyderabad, India 2 JNTUH Hyderabad, IndiapravnkumarNoch keine Bewertungen
- Fuji Smart power device M-POWER2 overviewDokument10 SeitenFuji Smart power device M-POWER2 overviewfloriantudorNoch keine Bewertungen











































































![CASD 2017. It cannot be denied that robust model predictive control with input constraint have been playing an important role in nonlinear model analysis. A group of nonlinear model system under state – dependent disturbances and input constraint is approached by robust nonlinear model predictive control method. The investigated state space model is separated into linear part, mismatch model and state – dependent disturbances belonging L∞. Solving optimization problem of upper quadratic function of infinite horizon objective function with input constraint via LMIs [4] provide state – feedback control law to help state converge to origin. In this paper, in order to obtain robust stability condition, the proposed method must generates stability regions lying in feasibility regions which ensure the existence of solution. Additionally, these regions are able to contract after each sampling time to proof the robust stability of the system. Finally, the simulation results of the three dimen](https://imgv2-1-f.scribdassets.com/img/document/349760552/149x198/e21f871042/1496078010?v=1)