Das könnte Ihnen auch gefallen
- Feedback CharacteristicsDokument17 SeitenFeedback CharacteristicsRajendar PonagantiNoch keine Bewertungen
- Chapter 3Dokument10 SeitenChapter 3hailegebreselassie24Noch keine Bewertungen
- Control 2 Lec4Dokument13 SeitenControl 2 Lec4Ahmed YounisNoch keine Bewertungen
- Chapter3 2Dokument12 SeitenChapter3 2hailegebreselassie24Noch keine Bewertungen
- FOC Lect5 FeedbackDokument16 SeitenFOC Lect5 FeedbackErhan ÖZNoch keine Bewertungen
- Notes 4Dokument13 SeitenNotes 4lili aboudNoch keine Bewertungen
- Reconstruction PDFDokument13 SeitenReconstruction PDFRamaDinakaranNoch keine Bewertungen
- System Representation: - Where The Input Signal Is of Z-TransformDokument36 SeitenSystem Representation: - Where The Input Signal Is of Z-TransformPallavi NalawadeNoch keine Bewertungen
- Control Strategy: Single Input and Single Output With Unit FeedbackDokument4 SeitenControl Strategy: Single Input and Single Output With Unit FeedbackmulyanaNoch keine Bewertungen
- Zero Order HoldDokument19 SeitenZero Order HoldSn ProfNoch keine Bewertungen
- EE351Chap3-2.0 - Transfer FTN & SFGsDokument19 SeitenEE351Chap3-2.0 - Transfer FTN & SFGsSardar Hamid ullahNoch keine Bewertungen
- Dada La Señal No Periódica G (T)Dokument27 SeitenDada La Señal No Periódica G (T)Marko Chambi ColqueNoch keine Bewertungen
- Greens Functions: Dr. Imalie Gamalath Dept. of Phys University of Colombo (Sri Lanka)Dokument50 SeitenGreens Functions: Dr. Imalie Gamalath Dept. of Phys University of Colombo (Sri Lanka)A1973rayNoch keine Bewertungen
- Tarea Tema 2 B Control DigitalDokument2 SeitenTarea Tema 2 B Control DigitalEduardo Rios VazquezNoch keine Bewertungen
- Tutorial 11Dokument25 SeitenTutorial 11Yang ElvisQUNoch keine Bewertungen
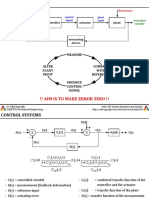
- !! Aim Is To Make Error Zero !!: Controller Actuator PlantDokument11 Seiten!! Aim Is To Make Error Zero !!: Controller Actuator PlantcapturemrahNoch keine Bewertungen
- Chapter 6 SRDokument137 SeitenChapter 6 SRMadhusmita BarikNoch keine Bewertungen
- Bode Plot PresentationDokument48 SeitenBode Plot PresentationJulcemar CapellaroNoch keine Bewertungen
- Digital Signal ProcessingDokument9 SeitenDigital Signal ProcessingMohamed shabanaNoch keine Bewertungen
- 13 - Digital Controller DesignDokument22 Seiten13 - Digital Controller DesignEverton CollingNoch keine Bewertungen
- Objectives: Chapter 4: Feedback Control System CharacteristicsDokument17 SeitenObjectives: Chapter 4: Feedback Control System CharacteristicsNikhil V NainoorNoch keine Bewertungen
- Hankel-Norm Based Interaction Measure For Input-Output PairingDokument6 SeitenHankel-Norm Based Interaction Measure For Input-Output Pairingspams20035571Noch keine Bewertungen
- Frequency Response TechniquesDokument18 SeitenFrequency Response Techniquesiamketul6340Noch keine Bewertungen
- Bode PlotDokument38 SeitenBode PlotjaganathapandianNoch keine Bewertungen
- (Preprint) AAS 13-213: Edwin S. Ahn, Richard W. Longman, and Jae J. KimDokument24 Seiten(Preprint) AAS 13-213: Edwin S. Ahn, Richard W. Longman, and Jae J. KimAyman IsmailNoch keine Bewertungen
- Feedback Control LectureDokument16 SeitenFeedback Control LecturepierrefreNoch keine Bewertungen
- Automatic Control II - Sensitivity Robustness and OptimalityDokument8 SeitenAutomatic Control II - Sensitivity Robustness and Optimalityعبدالحميد أبوشينةNoch keine Bewertungen
- Unit-III CCP ModifiedDokument28 SeitenUnit-III CCP ModifiedRaju GaraNoch keine Bewertungen
- The Pulse Transfer Function: Convolution SummationDokument14 SeitenThe Pulse Transfer Function: Convolution Summationdilawar sumraNoch keine Bewertungen
- Linear Control Systems: Ali Karimpour Associate Professor Ferdowsi University of MashhadDokument17 SeitenLinear Control Systems: Ali Karimpour Associate Professor Ferdowsi University of MashhadZain AslamNoch keine Bewertungen
- 6 Digital Controller DesignDokument23 Seiten6 Digital Controller DesignEngr. Naveed MazharNoch keine Bewertungen
- MCH3008 Lecture Week 10Dokument305 SeitenMCH3008 Lecture Week 10moodyalsulaibiNoch keine Bewertungen
- Time-Domain Analysis of The Linear SystemsDokument32 SeitenTime-Domain Analysis of The Linear SystemskamalNoch keine Bewertungen
- D-Sampled SystemsDokument16 SeitenD-Sampled Systemsbbb bbbNoch keine Bewertungen
- Control - System - Chapter 6 - 8EDokument51 SeitenControl - System - Chapter 6 - 8EE24089046林雯琪Noch keine Bewertungen
- Linear Control Systems: Ali Karimpour Associate Professor Ferdowsi University of MashhadDokument33 SeitenLinear Control Systems: Ali Karimpour Associate Professor Ferdowsi University of MashhadZain AslamNoch keine Bewertungen
- KOM 3781 Discrete-Time Control Systems: Veysel GaziDokument72 SeitenKOM 3781 Discrete-Time Control Systems: Veysel GaziFatih CanbolatNoch keine Bewertungen
- H As Se N: Feedback Control System Characteristics and PerformanceDokument11 SeitenH As Se N: Feedback Control System Characteristics and PerformanceYash maullooNoch keine Bewertungen
- 05 Fourier Transform SpectrumDokument8 Seiten05 Fourier Transform SpectrumPesce Tech symposiumNoch keine Bewertungen
- Control System Engineering: Prof. Amitkumar B. Panchal, Assistant ProfessorDokument76 SeitenControl System Engineering: Prof. Amitkumar B. Panchal, Assistant ProfessorSudhanshu Singh0% (1)
- Wise Reason Stupid Necessity: "The Are Instructed by by The, by And, by ." - Cicero (Dokument19 SeitenWise Reason Stupid Necessity: "The Are Instructed by by The, by And, by ." - Cicero (Pahala SamosirNoch keine Bewertungen
- Bode Plot - EC 502Dokument37 SeitenBode Plot - EC 502ajay meena100% (2)
- L12 SystemType, DC Gain and Its Effect On The SystemDokument8 SeitenL12 SystemType, DC Gain and Its Effect On The Systemalex carterNoch keine Bewertungen
- Digital Control Systems Mucai 2Dokument1 SeiteDigital Control Systems Mucai 2Teddy MucaiNoch keine Bewertungen
- 351 - 27435 - EE419 - 2020 - 1 - 2 - 1 - 0 2 EE419 Lec2,3 Bode PlotDokument42 Seiten351 - 27435 - EE419 - 2020 - 1 - 2 - 1 - 0 2 EE419 Lec2,3 Bode Plotyoussef hossamNoch keine Bewertungen
- Reduction of Multiple SubsystemDokument33 SeitenReduction of Multiple SubsystemnicklingatongNoch keine Bewertungen
- Tegar Rochmad Oddy Pramanto - Tugas Bab 7 Pengendalian ProsesDokument5 SeitenTegar Rochmad Oddy Pramanto - Tugas Bab 7 Pengendalian ProsesTegarRochmad OddyPramantoNoch keine Bewertungen
- Fourier Transform PropertiesDokument1 SeiteFourier Transform PropertiessightlesswarriorNoch keine Bewertungen
- Control Systems: GATE Objective & Numerical Type SolutionsDokument15 SeitenControl Systems: GATE Objective & Numerical Type SolutionsFlat MateNoch keine Bewertungen
- Lecture 2 IIIDokument11 SeitenLecture 2 IIIgks5kc8bhdNoch keine Bewertungen
- Chapter 5 Transmission LinesDokument33 SeitenChapter 5 Transmission Lines123 georgeNoch keine Bewertungen
- Updated Chapter 2 Control Systems Lecture NotesDokument22 SeitenUpdated Chapter 2 Control Systems Lecture Notesvijay rajNoch keine Bewertungen
- Experiment: ObjectiveDokument3 SeitenExperiment: ObjectiveVivek PatelNoch keine Bewertungen
- R(S) C(S)Dokument16 SeitenR(S) C(S)Ananthan SrijithNoch keine Bewertungen
- Modern Control Engineering: System's RepresentationDokument30 SeitenModern Control Engineering: System's RepresentationBrooklynPrinceNoch keine Bewertungen
- Control System PPKDokument14 SeitenControl System PPKP Praveen KumarNoch keine Bewertungen
- EET302 M2-Ktunotes - inDokument33 SeitenEET302 M2-Ktunotes - inAkhilaNoch keine Bewertungen
- Lesson 11Dokument24 SeitenLesson 11KhuleedShaikhNoch keine Bewertungen
- Feedforward Control (前馈控制) : Lei Xie Institute of Industrial Control, Zhejiang University, Hangzhou, P. R. ChinaDokument18 SeitenFeedforward Control (前馈控制) : Lei Xie Institute of Industrial Control, Zhejiang University, Hangzhou, P. R. ChinaankurNoch keine Bewertungen
- Riya Mary Cherian: Specialization: Human ResourceDokument4 SeitenRiya Mary Cherian: Specialization: Human ResourceNikhil KhobragadeNoch keine Bewertungen
- Reading Comprehension: Pratyush at Toughest QuestionsDokument40 SeitenReading Comprehension: Pratyush at Toughest QuestionsJaved AnwarNoch keine Bewertungen
- SpeedwayReaderQuickStartGuide 50484060407Dokument2 SeitenSpeedwayReaderQuickStartGuide 50484060407LuisNoch keine Bewertungen
- Penguatan Industri Kreatif Batik Semarang Di Kampung Alam Malon Kecamatan Gunung Pati SemarangDokument10 SeitenPenguatan Industri Kreatif Batik Semarang Di Kampung Alam Malon Kecamatan Gunung Pati SemarangAllo YeNoch keine Bewertungen
- Introduction To Forensic Science Questioned DocumentsDokument50 SeitenIntroduction To Forensic Science Questioned DocumentsLyka C. De Guzman100% (2)
- Burkina Faso NigerDokument21 SeitenBurkina Faso NigerAlin Cosma100% (1)
- Jigs BatacDokument28 SeitenJigs BatacZab Robledo RiveraNoch keine Bewertungen
- Api580 Rbi OverviewDokument5 SeitenApi580 Rbi Overviewbitam_27Noch keine Bewertungen
- Introduction To The Web AnalysisDokument2 SeitenIntroduction To The Web AnalysisAbNoch keine Bewertungen
- Land Reclamation in SingaporeDokument27 SeitenLand Reclamation in SingaporeAbdul JabbarNoch keine Bewertungen
- CVP LicenseDokument7 SeitenCVP LicenseWaqar KhanNoch keine Bewertungen
- Multicast Live Video Broadcasting Using Real Time TransmissionDokument2 SeitenMulticast Live Video Broadcasting Using Real Time Transmissionaruna2707Noch keine Bewertungen
- South Coast LIDAR Project, 2008 - Delivery 1 QC AnalysisDokument15 SeitenSouth Coast LIDAR Project, 2008 - Delivery 1 QC AnalysisariesugmNoch keine Bewertungen
- Design and Fabrication Dual Side Shaper MachineDokument2 SeitenDesign and Fabrication Dual Side Shaper MachineKarthik DmNoch keine Bewertungen
- 458M Parr 6755 Solution Calorimeter InstDokument56 Seiten458M Parr 6755 Solution Calorimeter InstWilo JaraNoch keine Bewertungen
- English Practice 1: C. Carried D. Sugar B. Underline A. Danger A. CharacterDokument3 SeitenEnglish Practice 1: C. Carried D. Sugar B. Underline A. Danger A. CharacterKeisaNoch keine Bewertungen
- Processes 05 00040 PDFDokument15 SeitenProcesses 05 00040 PDFPedro Romel Nascimento HerbayNoch keine Bewertungen
- KG 2 Week 5 - (133089689484163457) - 0Dokument3 SeitenKG 2 Week 5 - (133089689484163457) - 0Nahdat Al Ghad International SchoolNoch keine Bewertungen
- Earn A Masters Degree in Computer Science With Paid Internship in A Company in The U.SDokument12 SeitenEarn A Masters Degree in Computer Science With Paid Internship in A Company in The U.SGERAUDNoch keine Bewertungen
- CV 4Dokument2 SeitenCV 4api-312667938Noch keine Bewertungen
- Human Genome ProjectDokument28 SeitenHuman Genome Projectمحمد بلال سرورNoch keine Bewertungen
- Organization StructureDokument11 SeitenOrganization StructureKaran RoyNoch keine Bewertungen
- MIS (Management Information Systems) : Margaret RouseDokument3 SeitenMIS (Management Information Systems) : Margaret RouseSANDUN KAVINDANoch keine Bewertungen
- Online Assignment 1 Math Econ 2021 22Dokument6 SeitenOnline Assignment 1 Math Econ 2021 22Panagiotis ScordisNoch keine Bewertungen
- Curriculum Vitae: EducationDokument3 SeitenCurriculum Vitae: EducationdavidNoch keine Bewertungen
- CNC Unit 1Dokument4 SeitenCNC Unit 1chandiran88Noch keine Bewertungen
- Abcc1103 - Introduction To CommunicationDokument16 SeitenAbcc1103 - Introduction To CommunicationSimon RajNoch keine Bewertungen
- Phys101l Ex104Dokument2 SeitenPhys101l Ex104koko BunchNoch keine Bewertungen
- Part C-Instructional MaterialsDokument11 SeitenPart C-Instructional Materialsapi-326255121Noch keine Bewertungen
- Gujarat Technological UniversityDokument2 SeitenGujarat Technological Universitysmartboynitish01Noch keine Bewertungen