Das könnte Ihnen auch gefallen
- Analysis Within the Systems Development Life-Cycle: Book 2 Data Analysis — The MethodsVon EverandAnalysis Within the Systems Development Life-Cycle: Book 2 Data Analysis — The MethodsNoch keine Bewertungen
- DLD Student Manual - Digital Logic Design Unified Curriculum Lab Manual Final VersionDokument30 SeitenDLD Student Manual - Digital Logic Design Unified Curriculum Lab Manual Final Versionkiran shaukatNoch keine Bewertungen
- Basic Electronics PDFDokument43 SeitenBasic Electronics PDFakkkkNoch keine Bewertungen
- Student Lab File FormatDokument7 SeitenStudent Lab File FormatZubair AliNoch keine Bewertungen
- Updated MOS 1 (Lab Manual)Dokument71 SeitenUpdated MOS 1 (Lab Manual)Noor Ul Amin AwanNoch keine Bewertungen
- OC DLL October 1-5, 2018 Grade 11Dokument3 SeitenOC DLL October 1-5, 2018 Grade 11Maria Victoria Padro100% (1)
- RACI Matrix Template: Project Name: Roles TableDokument2 SeitenRACI Matrix Template: Project Name: Roles TableAliceJohnNoch keine Bewertungen
- Tinkercad Example RubricDokument1 SeiteTinkercad Example Rubricapi-607522992Noch keine Bewertungen
- Bsee 3d-Bosh Job Hazard Analysis - ExamDokument5 SeitenBsee 3d-Bosh Job Hazard Analysis - ExamAubrey AnteNoch keine Bewertungen
- Unpacking Standards: Learning CompetenciesDokument24 SeitenUnpacking Standards: Learning CompetenciesFrancis Del Rosario100% (7)
- Flexible Instruction Delivery Plan (Fidp)Dokument3 SeitenFlexible Instruction Delivery Plan (Fidp)Jamaela PatilanNoch keine Bewertungen
- 2.2 WORKSHOP SIMULATION (Information Phase) 2019Dokument13 Seiten2.2 WORKSHOP SIMULATION (Information Phase) 2019Mohd Hilmi Bin MalekNoch keine Bewertungen
- App C Task WS TemplDokument6 SeitenApp C Task WS TemplMOHAMAD NIZAM AFHAM HASMADINoch keine Bewertungen
- Surveying-Tools-and-EquipmentDokument8 SeitenSurveying-Tools-and-Equipmentzenki franciscoNoch keine Bewertungen
- CC607 Water and Waste Water Engineering Assignment 1: Prepared By: Checked &verified byDokument4 SeitenCC607 Water and Waste Water Engineering Assignment 1: Prepared By: Checked &verified byமு சாராணி நாகராஜன்Noch keine Bewertungen
- UntitledDokument31 SeitenUntitledSiva PakiamNoch keine Bewertungen
- Trace and Plot Basic Trigonometric Functions in Matlab: ObjectiveDokument6 SeitenTrace and Plot Basic Trigonometric Functions in Matlab: ObjectiveM AzeemNoch keine Bewertungen
- Professional Engineer Occupational Cat Description and Independent Practice Competencies BrfinalDokument20 SeitenProfessional Engineer Occupational Cat Description and Independent Practice Competencies BrfinalNga Ik KwongNoch keine Bewertungen
- 8 Tech 1 - Lesson 2Dokument4 Seiten8 Tech 1 - Lesson 2api-662767243Noch keine Bewertungen
- 2.3 Function Analysis Phase April 2019Dokument16 Seiten2.3 Function Analysis Phase April 2019Mohd Hilmi Bin MalekNoch keine Bewertungen
- Technology Lesson Plan Term 1 Week 5 of 2024Dokument2 SeitenTechnology Lesson Plan Term 1 Week 5 of 2024Maphothego MogodiNoch keine Bewertungen
- Lessons Learned TemplateDokument7 SeitenLessons Learned Template123vsa50% (2)
- Competences Update EngDokument6 SeitenCompetences Update EngЕкатерина ЛомакинаNoch keine Bewertungen
- BSS073-3 Assessment 1 BriefDokument5 SeitenBSS073-3 Assessment 1 BriefF-UOB-13B L� Gia KhoaNoch keine Bewertungen
- Fluids Exp 5Dokument6 SeitenFluids Exp 5Jeiel ValenciaNoch keine Bewertungen
- P301 Commentary - Islam and Women Marking Grid For Unit 1: DissertationDokument5 SeitenP301 Commentary - Islam and Women Marking Grid For Unit 1: DissertationMarinos EliadesNoch keine Bewertungen
- Vto Cu2Dokument9 SeitenVto Cu2pijaazizNoch keine Bewertungen
- INSET Monitoring ToolDokument9 SeitenINSET Monitoring ToolSonny Matias100% (6)
- L4 Diploma in Health and Social Care Management AssignmentsDokument29 SeitenL4 Diploma in Health and Social Care Management Assignmentsaahiloman1230% (1)
- Performance Based Assessment 2Dokument86 SeitenPerformance Based Assessment 2b5pnjj788wNoch keine Bewertungen
- OJT Evaluation Form for Civil Engineering TraineeDokument4 SeitenOJT Evaluation Form for Civil Engineering TraineeWynne TillasNoch keine Bewertungen
- Teacher I: Present Approp Act Previous Approp ActDokument5 SeitenTeacher I: Present Approp Act Previous Approp Actjufel krisNoch keine Bewertungen
- Group Project InstructionDokument8 SeitenGroup Project InstructionFARAH ZAHIRAH YAHYANoch keine Bewertungen
- L7 DipSML Assignment Briefs Sept 2020Dokument36 SeitenL7 DipSML Assignment Briefs Sept 2020Goals & All Highlights100% (1)
- OTHM L5 Extended Diploma in Business Management Spec Assignments 02 2022-2Dokument60 SeitenOTHM L5 Extended Diploma in Business Management Spec Assignments 02 2022-2Taiba e ShaheenNoch keine Bewertungen
- LBYCVW3 Syllabus (Online)Dokument10 SeitenLBYCVW3 Syllabus (Online)Troy DanielsNoch keine Bewertungen
- Research methodology assessment plan and rubricDokument6 SeitenResearch methodology assessment plan and rubricErasto NdassaNoch keine Bewertungen
- DBM CSC Form No. 1 Position Description Forms TEACHER IDokument4 SeitenDBM CSC Form No. 1 Position Description Forms TEACHER IJohn christopher BariaNoch keine Bewertungen
- CES511 Lab Report: Structural Analysis of Two & Three Hinged ArchesDokument22 SeitenCES511 Lab Report: Structural Analysis of Two & Three Hinged ArchesjajenNoch keine Bewertungen
- Avte 125L Activity 1Dokument5 SeitenAvte 125L Activity 1Fitzpatrick CunananNoch keine Bewertungen
- 20PWMCT0732 Lab#1Dokument9 Seiten20PWMCT0732 Lab#1Imad AhmadNoch keine Bewertungen
- Design ExperimentDokument16 SeitenDesign ExperimentCHRISTED ALJO BARROGANoch keine Bewertungen
- Proposal Project Presentation Final Project PresentationDokument7 SeitenProposal Project Presentation Final Project PresentationDK DMNoch keine Bewertungen
- Student Perforformance RatingDokument3 SeitenStudent Perforformance RatingJhong De LeonNoch keine Bewertungen
- 20PWMCT0732 Lab#3Dokument7 Seiten20PWMCT0732 Lab#3Imad AhmadNoch keine Bewertungen
- Activities Guide and Evaluation Rubric - Phase 0 - Contextualize Industrial Automation.Dokument5 SeitenActivities Guide and Evaluation Rubric - Phase 0 - Contextualize Industrial Automation.Yecid Fabian AlvaradoNoch keine Bewertungen
- IEP Marking Grid - Individual Reflective ReportDokument3 SeitenIEP Marking Grid - Individual Reflective ReportBethelNoch keine Bewertungen
- Fiber Optic Cable Types and StrippingDokument12 SeitenFiber Optic Cable Types and StrippingHari VarashanNoch keine Bewertungen
- ADVN 126 Outdoor and Advance Education 2021-2 TOS FinalsDokument7 SeitenADVN 126 Outdoor and Advance Education 2021-2 TOS Finalsrenzen jay medenillaNoch keine Bewertungen
- Engineers Australia Stage 2 Competency StandardDokument7 SeitenEngineers Australia Stage 2 Competency Standardeducator56Noch keine Bewertungen
- Practical Excercise Rubrics EditedDokument1 SeitePractical Excercise Rubrics EditedMus'ab Usman0% (1)
- Plan To Undertake A Routine TaskDokument7 SeitenPlan To Undertake A Routine TaskRiddhi SarvaiyaNoch keine Bewertungen
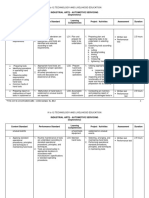
- Industrial Arts - Automotive Servicing (Exploratory) : K To 12 Technology and Livelihood EducationDokument7 SeitenIndustrial Arts - Automotive Servicing (Exploratory) : K To 12 Technology and Livelihood Educationjayson acunaNoch keine Bewertungen
- Trainer AccreditationDokument2 SeitenTrainer AccreditationAnu OhriNoch keine Bewertungen
- IB CAT Designing Experiment - Factor Affcting Enzyme ActivityDokument5 SeitenIB CAT Designing Experiment - Factor Affcting Enzyme Activitybaker nasNoch keine Bewertungen
- Performance Based AssessmentDokument2 SeitenPerformance Based AssessmentMarie Ann Toong QuicoNoch keine Bewertungen
- DIGESTV20009Dokument7 SeitenDIGESTV20009MA. ANGELICA SESUCANoch keine Bewertungen
- Profesional PracticeDokument35 SeitenProfesional PracticeAbdullah NehumanNoch keine Bewertungen
- Alojadocagas Lesson4Dokument3 SeitenAlojadocagas Lesson4api-534445995Noch keine Bewertungen
- General Layout For An Experimental Design Diagram: Scientific MethodDokument2 SeitenGeneral Layout For An Experimental Design Diagram: Scientific MethodAmirul RasyidNoch keine Bewertungen
- R18 B. Tech. IV Year, I Semester EEE SyllabusDokument17 SeitenR18 B. Tech. IV Year, I Semester EEE SyllabusGoutham MekalaNoch keine Bewertungen
- r05320201 Digital Signal ProcessingDokument8 Seitenr05320201 Digital Signal ProcessingSRINIVASA RAO GANTANoch keine Bewertungen
- Inverse Z-Transform and Difference Equations: 6.003 Fall 2016 Lecture 12Dokument29 SeitenInverse Z-Transform and Difference Equations: 6.003 Fall 2016 Lecture 12elvagojpNoch keine Bewertungen
- Ece For RtuDokument65 SeitenEce For RtuAnup BhowmickNoch keine Bewertungen
- My Lecture Notes in Speech Processing and Recognition CourseDokument190 SeitenMy Lecture Notes in Speech Processing and Recognition CourseMohammed Musfir N N100% (1)
- Lab Report#5: Digital Signal Processing EEE-324Dokument11 SeitenLab Report#5: Digital Signal Processing EEE-324Abdul BasitNoch keine Bewertungen
- EE8591 DIGITAL SIGNAL PROCESSING SyllabusDokument2 SeitenEE8591 DIGITAL SIGNAL PROCESSING Syllabussiva100% (1)
- Yyy Yyyyyy Yyyyyy Yyyyyyyyyy Yyyy Yyyyy YyyyyyyDokument10 SeitenYyy Yyyyyy Yyyyyy Yyyyyyyyyy Yyyy Yyyyy Yyyyyyyhill_rws407Noch keine Bewertungen
- Electronics Sem - 4 Gtu SyllabusDokument19 SeitenElectronics Sem - 4 Gtu SyllabusKarishma SavNoch keine Bewertungen
- Signals and SystemsDokument42 SeitenSignals and Systemsjijo123408Noch keine Bewertungen
- The Handbook of Formulas and Tables For Signal ProcessingDokument10 SeitenThe Handbook of Formulas and Tables For Signal Processingdimil6Noch keine Bewertungen
- CIVIl 3 RDDokument16 SeitenCIVIl 3 RDSuresh AnnaduraiNoch keine Bewertungen
- Important QuestionsDokument4 SeitenImportant QuestionsLatheefNoch keine Bewertungen
- Application of Complex AnalysisDokument7 SeitenApplication of Complex Analysis4MT19CS076Manvith A ShettyNoch keine Bewertungen
- SS Notes - VMTWDokument67 SeitenSS Notes - VMTWNarendra GaliNoch keine Bewertungen
- Systems and Transfer FunctionDokument48 SeitenSystems and Transfer FunctionhgfhgfhfNoch keine Bewertungen
- Transform Definition: - Definition 2.1 Given The Causal Sequence Then Its Z-Transform Is Defined AsDokument15 SeitenTransform Definition: - Definition 2.1 Given The Causal Sequence Then Its Z-Transform Is Defined Asaravishankar23Noch keine Bewertungen
- Signals and Systems TextbookDokument820 SeitenSignals and Systems TextbookAishah MabayojeNoch keine Bewertungen
- 4th Sem ECDokument54 Seiten4th Sem ECAnup BhowmickNoch keine Bewertungen
- Nagpur University All Years SyllabusDokument31 SeitenNagpur University All Years SyllabusAjit PaswanNoch keine Bewertungen
- Essentials of Digital Signal Processing LathiDokument763 SeitenEssentials of Digital Signal Processing LathiPili AnaniaNoch keine Bewertungen
- Agril - Engg.syllbus DetailsDokument55 SeitenAgril - Engg.syllbus DetailsVikas VikkiNoch keine Bewertungen
- Design and Implementation of IIR FilterDokument45 SeitenDesign and Implementation of IIR FilterSaurabh Shukla67% (3)
- Mat 3 SyllabusDokument2 SeitenMat 3 SyllabusAshutosh KaushikNoch keine Bewertungen
- Lab Course File EC 601 DSPDokument17 SeitenLab Course File EC 601 DSPPrachi ParasharNoch keine Bewertungen
- Experiment No.1 I DSP TMS320C6713 DSK & O DT & Matlab: Lab Manual EEE324 Digital Signal ProcessingDokument27 SeitenExperiment No.1 I DSP TMS320C6713 DSK & O DT & Matlab: Lab Manual EEE324 Digital Signal ProcessingMirza Riyasat AliNoch keine Bewertungen
- Course Description Form (CDF) Digital Signal Processing EEE324 - Updated 4Dokument10 SeitenCourse Description Form (CDF) Digital Signal Processing EEE324 - Updated 4Huzaifa YasirNoch keine Bewertungen
- Signals & Systems (Common To Ec/Tc/It/Bm/Ml)Dokument5 SeitenSignals & Systems (Common To Ec/Tc/It/Bm/Ml)sureshfm1Noch keine Bewertungen
- DSP QBDokument8 SeitenDSP QBSaibala PattabiramanNoch keine Bewertungen
- IES E & T Topic wise Questions Signal & Systems YEAR 1999 MCQ 1Dokument70 SeitenIES E & T Topic wise Questions Signal & Systems YEAR 1999 MCQ 1Rakesh Sharma100% (2)