Das könnte Ihnen auch gefallen
- 2 16 1350130228 7. Flexible Wireless DataDokument6 Seiten2 16 1350130228 7. Flexible Wireless DataSumeet SauravNoch keine Bewertungen
- MIPS Report FileDokument17 SeitenMIPS Report FileAayushiNoch keine Bewertungen
- Unit 2 - Embedded SystemDokument75 SeitenUnit 2 - Embedded Systemsujith100% (4)
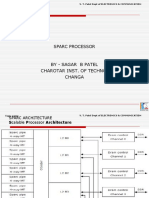
- Sparc Processor: by - Sagar B Patel Charotar Inst. of Techno. ChangaDokument24 SeitenSparc Processor: by - Sagar B Patel Charotar Inst. of Techno. ChangaRavishah007Noch keine Bewertungen
- Conference Template A4Dokument4 SeitenConference Template A4ATHIRA V RNoch keine Bewertungen
- Continuation 4TH Unit DpacoDokument18 SeitenContinuation 4TH Unit DpacoSANJAY KASI VISVANATHANNoch keine Bewertungen
- EC8552 Computer Architecture and Organization 2 MDokument23 SeitenEC8552 Computer Architecture and Organization 2 MKeshvan DhanapalNoch keine Bewertungen
- Ijaret: ©iaemeDokument9 SeitenIjaret: ©iaemeIAEME PublicationNoch keine Bewertungen
- Task Switching:: JMP Call JMP Call Iret JMP Call IretDokument19 SeitenTask Switching:: JMP Call JMP Call Iret JMP Call IretAshish PatilNoch keine Bewertungen
- QB106611Dokument6 SeitenQB106611Kingsley SNoch keine Bewertungen
- Computer Architecture 16 MarksDokument28 SeitenComputer Architecture 16 MarksBalachandar2000100% (1)
- Risc Processor Using VHDLDokument5 SeitenRisc Processor Using VHDLAruna RajanNoch keine Bewertungen
- AC CourseWork MihaiTrofimDokument31 SeitenAC CourseWork MihaiTrofimDima VlasNoch keine Bewertungen
- Exp 2Dokument10 SeitenExp 2NAFISA ISLAM 1808006Noch keine Bewertungen
- 10th Lecture: Multiple-Issue Processors: Please Recall: Branch PredictionDokument28 Seiten10th Lecture: Multiple-Issue Processors: Please Recall: Branch PredictionSohei LaNoch keine Bewertungen
- Microprocessor Module-5 Question AnswersDokument8 SeitenMicroprocessor Module-5 Question AnswersShubham BargeNoch keine Bewertungen
- W5 - L1 - MacInst and OperDokument36 SeitenW5 - L1 - MacInst and OperNeel RavalNoch keine Bewertungen
- 32 Bit Risc ProcessorDokument60 Seiten32 Bit Risc ProcessorMuruganantham MuthusamyNoch keine Bewertungen
- Design and Performance Analysis of 8-Bit RISC Processor Using Xilinx ToolDokument7 SeitenDesign and Performance Analysis of 8-Bit RISC Processor Using Xilinx Toolkirat palNoch keine Bewertungen
- Design of 32-Bit Risc Cpu Based On Mips: Journal of Global Research in Computer ScienceDokument5 SeitenDesign of 32-Bit Risc Cpu Based On Mips: Journal of Global Research in Computer ScienceAkanksha Dixit ManodhyaNoch keine Bewertungen
- Ee/Ce 6370 Spring 2015: Design Assignment: Utd Pipelined MicroprocessorDokument7 SeitenEe/Ce 6370 Spring 2015: Design Assignment: Utd Pipelined MicroprocessorRohit YedidaNoch keine Bewertungen
- Instruction Pipeline Design, Arithmetic Pipeline Deign - Super Scalar Pipeline DesignDokument34 SeitenInstruction Pipeline Design, Arithmetic Pipeline Deign - Super Scalar Pipeline DesignMarlon TugweteNoch keine Bewertungen
- Objectives:: CS311 Lecture: CPU Control: Hardwired Control and Microprogrammed ControlDokument13 SeitenObjectives:: CS311 Lecture: CPU Control: Hardwired Control and Microprogrammed ControlVaibhav SharmaNoch keine Bewertungen
- Computer Architecture IIDokument27 SeitenComputer Architecture IIOlouge Eya EkolleNoch keine Bewertungen
- Computer ArchitectureDokument4 SeitenComputer ArchitectureAgrippa MungaziNoch keine Bewertungen
- Lecture 2 Basic CPU ArchitecturesDokument7 SeitenLecture 2 Basic CPU ArchitecturesMohan Krishna Reddy KarriNoch keine Bewertungen
- 2-Introduction To Pentium ProcessorDokument15 Seiten2-Introduction To Pentium Processorafzal_a92% (13)
- ArchitectureDokument14 SeitenArchitectureGopal PawarNoch keine Bewertungen
- Module 3 CoaDokument17 SeitenModule 3 CoaGourab DashNoch keine Bewertungen
- RISC Instruction Set:: I) Data Manipulation InstructionsDokument8 SeitenRISC Instruction Set:: I) Data Manipulation InstructionsSwarup BharNoch keine Bewertungen
- Superscalar Processor Pentium ProDokument11 SeitenSuperscalar Processor Pentium ProdiwakerNoch keine Bewertungen
- Aca 2 Marks With AnswersDokument22 SeitenAca 2 Marks With AnswersmenakadevieceNoch keine Bewertungen
- Course Material (Question Bank)Dokument6 SeitenCourse Material (Question Bank)Práviñ KumarNoch keine Bewertungen
- Chapter Four 4. The Control UnitDokument9 SeitenChapter Four 4. The Control UnitTamene TekileNoch keine Bewertungen
- A) Von Neumann ArchitectureDokument3 SeitenA) Von Neumann Architecturedriftwood 069Noch keine Bewertungen
- IRJET Design of Low Power 32 Bit RISC PRDokument8 SeitenIRJET Design of Low Power 32 Bit RISC PRpawan vermaNoch keine Bewertungen
- Input Unit: Five Basic Components of Computer SystemDokument9 SeitenInput Unit: Five Basic Components of Computer SystemJefin PaulNoch keine Bewertungen
- Cse IV Computer Organization (10cs46) SolutionDokument62 SeitenCse IV Computer Organization (10cs46) Solutionnbpr0% (1)
- 8 Bit Microprocessor Using VHDL: Pallavi Deshmane, Maithili Lad & Pooja Mhetre Sharan KumarDokument6 Seiten8 Bit Microprocessor Using VHDL: Pallavi Deshmane, Maithili Lad & Pooja Mhetre Sharan KumarshubhamNoch keine Bewertungen
- Machines, Machine Languages, and Digital Logic: Accumulator Machines Have A Sharply Limited Number of DataDokument6 SeitenMachines, Machine Languages, and Digital Logic: Accumulator Machines Have A Sharply Limited Number of DataZanz ProjectzNoch keine Bewertungen
- BFM3333 Course: Microcontroller SystemDokument33 SeitenBFM3333 Course: Microcontroller SystemMostafa AbdulmalekNoch keine Bewertungen
- Lab Sheet 6 Single Cycle Datapath FinalDokument3 SeitenLab Sheet 6 Single Cycle Datapath FinalSANJEEV MALLICKNoch keine Bewertungen
- CoDokument80 SeitenCogdayanand4uNoch keine Bewertungen
- AssembyDokument57 SeitenAssembyOmar KamilNoch keine Bewertungen
- 17 Bit Implementation For Dual Core Risc ArchitectureDokument6 Seiten17 Bit Implementation For Dual Core Risc ArchitecturelambanaveenNoch keine Bewertungen
- Cep 1Dokument8 SeitenCep 1ShivamNoch keine Bewertungen
- Computer Arch NotesDokument9 SeitenComputer Arch NoteszomukozaNoch keine Bewertungen
- HenzonzzzzDokument5 SeitenHenzonzzzzapi-548516280Noch keine Bewertungen
- COA Mod 1 UpdatedDokument22 SeitenCOA Mod 1 UpdatedMirror LeechNoch keine Bewertungen
- Coa Unit - 5 NotesDokument6 SeitenCoa Unit - 5 Notes1NT19IS077-MADHURI.CNoch keine Bewertungen
- Chapter 4 - Central Processing Units Is BzudhesvsDokument7 SeitenChapter 4 - Central Processing Units Is Bzudhesvsrosdi jkmNoch keine Bewertungen
- Computer System Organizations: Ms - Chit Su MonDokument74 SeitenComputer System Organizations: Ms - Chit Su MonAjharuddin AnsariNoch keine Bewertungen
- kjwkc3 - Cs 2700 Mid TermDokument2 Seitenkjwkc3 - Cs 2700 Mid Termjinrongliu2382Noch keine Bewertungen
- CMPS293&290 Class Notes Chap 02Dokument24 SeitenCMPS293&290 Class Notes Chap 02hassanNoch keine Bewertungen
- Computer System Architecture MCA - 301Dokument10 SeitenComputer System Architecture MCA - 301Mangesh MalvankarNoch keine Bewertungen
- 5EC3-01: Computer Architecture: UNIT-3Dokument11 Seiten5EC3-01: Computer Architecture: UNIT-3Himanshi SainiNoch keine Bewertungen
- The Sparc ArchitectureDokument16 SeitenThe Sparc ArchitectureAshwini PatilNoch keine Bewertungen
- Computer Organization and Assembly Language: Lecture 2 - x86 Processor ArchitectureDokument23 SeitenComputer Organization and Assembly Language: Lecture 2 - x86 Processor ArchitectureNosreffejDelRosarioNoch keine Bewertungen
- SciLab Tugas 1Dokument24 SeitenSciLab Tugas 1Det StrixNoch keine Bewertungen
- Ineo 367 BrochureDokument8 SeitenIneo 367 BrochureandiNoch keine Bewertungen
- Java Programming: Program 2: Write A Program in Java For Widening and Narrowing ConversionDokument4 SeitenJava Programming: Program 2: Write A Program in Java For Widening and Narrowing Conversionumair riazNoch keine Bewertungen
- Serv LetsDokument15 SeitenServ LetsannaNoch keine Bewertungen
- MAN Cats t200 User MunualDokument9 SeitenMAN Cats t200 User MunualСаиф АббасNoch keine Bewertungen
- 20ESIT202 - Python ProgrammingDokument12 Seiten20ESIT202 - Python ProgrammingRashim RBNoch keine Bewertungen
- Fulmo GT: ECA1092 SeriesDokument2 SeitenFulmo GT: ECA1092 SeriesFlorescu FlorinNoch keine Bewertungen
- PLC Controlled Motion Release NotesDokument5 SeitenPLC Controlled Motion Release NotesEduardo Antonio MateusNoch keine Bewertungen
- MF-230 FAQ Harvey Norman v1.0Dokument2 SeitenMF-230 FAQ Harvey Norman v1.0Nur Liyana Binti YaakobNoch keine Bewertungen
- Keylo Operating Manual: HanoverDokument19 SeitenKeylo Operating Manual: HanoverDario Gabriel Coz RojasNoch keine Bewertungen
- ACS880 IGBT Supply Control Program: Firmware ManualDokument254 SeitenACS880 IGBT Supply Control Program: Firmware ManualGopinath PadhiNoch keine Bewertungen
- IOT-Assignment 2 PDFDokument5 SeitenIOT-Assignment 2 PDFQusai KHNoch keine Bewertungen
- OOT TutorialDokument3 SeitenOOT TutorialChaeriah WaelNoch keine Bewertungen
- Transport Layer ServicesDokument71 SeitenTransport Layer ServicesSomnath SinhaNoch keine Bewertungen
- Exam 1 SolDokument8 SeitenExam 1 SolChuang JamesNoch keine Bewertungen
- Apache KafkaDokument37 SeitenApache KafkaPhani Karthik MaradaniNoch keine Bewertungen
- Tomcat Cluster SetupDokument3 SeitenTomcat Cluster SetupsmjainNoch keine Bewertungen
- Lgr25, Lgr250, & Lgr1000: High-Speed Bacnet Routing & IntegrationDokument2 SeitenLgr25, Lgr250, & Lgr1000: High-Speed Bacnet Routing & IntegrationEssam MohamedNoch keine Bewertungen
- Sick NoderedDokument8 SeitenSick NoderedMateo PožgajNoch keine Bewertungen
- ADDADokument50 SeitenADDAAnupam KumarNoch keine Bewertungen
- Computer Basic KnowledgeDokument143 SeitenComputer Basic KnowledgeRam Prasad0% (1)
- Aud. in Cis Env. Final Exam 2nd Sem Ay2017-18 (Sam)Dokument9 SeitenAud. in Cis Env. Final Exam 2nd Sem Ay2017-18 (Sam)Uy SamuelNoch keine Bewertungen
- JCL Faqs: JCL Questions Amit Sethi Page 1 of 51Dokument51 SeitenJCL Faqs: JCL Questions Amit Sethi Page 1 of 51Ravikumar VankadaraNoch keine Bewertungen
- Installation and Architecture - 2019v2Dokument32 SeitenInstallation and Architecture - 2019v2abdiel AlveoNoch keine Bewertungen
- D45 System: 322011 Digital Colour Entrance Panel With Addresses ListDokument10 SeitenD45 System: 322011 Digital Colour Entrance Panel With Addresses ListBrunaNoch keine Bewertungen
- DfgfgsadfgsfDokument52 SeitenDfgfgsadfgsfdjzaffiroNoch keine Bewertungen
- Naslite Plus ManualDokument11 SeitenNaslite Plus Manualgregory_hamilton_9Noch keine Bewertungen
- Software Requirements Specification NetbeansDokument16 SeitenSoftware Requirements Specification NetbeansRaj PandeyNoch keine Bewertungen
- Pwn2Own 2014 AFD - Sys Privilege EscalationDokument16 SeitenPwn2Own 2014 AFD - Sys Privilege Escalationc583162Noch keine Bewertungen
- Python Basics-2Dokument94 SeitenPython Basics-2mahendra naikNoch keine Bewertungen