Das könnte Ihnen auch gefallen
- 10 .Definite IntegralsDokument13 Seiten10 .Definite IntegralsSarthak GuptaNoch keine Bewertungen
- Solving a pendulum equation and obtaining its general solutionDokument4 SeitenSolving a pendulum equation and obtaining its general solutionJose ArancibiaNoch keine Bewertungen
- Rješenje:: 1 / 6 1. Riješiti Diferencijalnu JednadžbuDokument6 SeitenRješenje:: 1 / 6 1. Riješiti Diferencijalnu JednadžbuNatasa VujovicNoch keine Bewertungen
- Calculating line integrals using Green's theoremDokument1 SeiteCalculating line integrals using Green's theorem21020055 Trần Thùy DungNoch keine Bewertungen
- Additional Topics in Integration: 6.1 Integration by Parts Integral TablesDokument32 SeitenAdditional Topics in Integration: 6.1 Integration by Parts Integral TablesHaris Aman ShaikhNoch keine Bewertungen
- MATH114: DIFFERENTIAL EQUATION DEFINITIONS AND ELIMINATIONDokument3 SeitenMATH114: DIFFERENTIAL EQUATION DEFINITIONS AND ELIMINATIONmark jefferson castroNoch keine Bewertungen
- Sample Probs - Lect 32Dokument2 SeitenSample Probs - Lect 32Gregorio MacchiaNoch keine Bewertungen
- Solutions & Answers For Aieee-2011 Version - RDokument9 SeitenSolutions & Answers For Aieee-2011 Version - Rseraz_pkNoch keine Bewertungen
- CBSE I Succeed Math 12th SP14Dokument10 SeitenCBSE I Succeed Math 12th SP14djjagu908Noch keine Bewertungen
- Curvature Lecture NotesDokument15 SeitenCurvature Lecture NotesRedwan KhalequeNoch keine Bewertungen
- Integration techniques and applicationsDokument53 SeitenIntegration techniques and applicationsAnum Nadeem KhanNoch keine Bewertungen
- Enma 103 Module 1Dokument6 SeitenEnma 103 Module 1Angelyn GurtizaNoch keine Bewertungen
- Structure Analysis I Structure Analysis IDokument66 SeitenStructure Analysis I Structure Analysis IbimantioNoch keine Bewertungen
- CQF January 2014 Maths Primer Differential Equations ExercisesDokument5 SeitenCQF January 2014 Maths Primer Differential Equations ExercisesShravan VenkataramanNoch keine Bewertungen
- Parametric Functions: X Fyy GTDokument10 SeitenParametric Functions: X Fyy GTcikguhafidzuddinNoch keine Bewertungen
- H2 Further Math ACJC-NJC-RVHS - H2 - FM - Prelim - 2022 - P2 - SolutionsDokument10 SeitenH2 Further Math ACJC-NJC-RVHS - H2 - FM - Prelim - 2022 - P2 - SolutionscamaralckinNoch keine Bewertungen
- Trigonometric and derivative formula identitiesDokument3 SeitenTrigonometric and derivative formula identitiesGemNoch keine Bewertungen
- 6 6doneDokument1 Seite6 6doneeperlaNoch keine Bewertungen
- HW1 SolutionsDokument4 SeitenHW1 SolutionsNick NardelliNoch keine Bewertungen
- 1STEPII2010Dokument3 Seiten1STEPII2010chenccNoch keine Bewertungen
- L No 22 1 PDFDokument26 SeitenL No 22 1 PDFsemabayNoch keine Bewertungen
- Chapter 17. Ordinary Differen-Tial EquationsDokument14 SeitenChapter 17. Ordinary Differen-Tial EquationsOlavGNoch keine Bewertungen
- Problem 2.19 PDFDokument2 SeitenProblem 2.19 PDFKauê BrittoNoch keine Bewertungen
- Chapter 10 Worked SolutionsDokument82 SeitenChapter 10 Worked SolutionspaulNoch keine Bewertungen
- Elemento VigaDokument29 SeitenElemento Vigacbaez_2Noch keine Bewertungen
- ODE Topic 5notes FinalDokument3 SeitenODE Topic 5notes FinalevansojoshuzNoch keine Bewertungen
- Soln Final Math154 2010Dokument5 SeitenSoln Final Math154 2010yasemin güneytepeNoch keine Bewertungen
- Module 5Dokument12 SeitenModule 5NICOLE ANN MARCELINONoch keine Bewertungen
- Wjec Gce Mathematics Unit 3 7 IntegrationDokument2 SeitenWjec Gce Mathematics Unit 3 7 IntegrationSubiraj RamanjoolooNoch keine Bewertungen
- n+ π, the cotangent and: Trigonometric Functions Elementary PropertiesDokument5 Seitenn+ π, the cotangent and: Trigonometric Functions Elementary PropertiesAron Lei RaitNoch keine Bewertungen
- D E - Lecture1-2 PDFDokument16 SeitenD E - Lecture1-2 PDFSaif UR RahmanNoch keine Bewertungen
- JJC H2 MATH P2 AnsDokument12 SeitenJJC H2 MATH P2 AnsSimrah Sultanah (Njc)Noch keine Bewertungen
- Homework 6: Nika Kurdadze October 17, 2020Dokument2 SeitenHomework 6: Nika Kurdadze October 17, 2020ნიკა ქურდაძეNoch keine Bewertungen
- Add Math SBP 07 Paper 2Dokument10 SeitenAdd Math SBP 07 Paper 2Naveen RajNoch keine Bewertungen
- Multiple Integrals: Example 3 SolutionDokument15 SeitenMultiple Integrals: Example 3 SolutionshivanshNoch keine Bewertungen
- Excel First Review and Training Center, Inc.: Cebu: Davao: Manila: BaguioDokument4 SeitenExcel First Review and Training Center, Inc.: Cebu: Davao: Manila: BaguioJacobi LaplaceNoch keine Bewertungen
- Chương 5b Tích Phân Hàm Lư NG Giác 1Dokument31 SeitenChương 5b Tích Phân Hàm Lư NG Giác 1chuong01Noch keine Bewertungen
- 2008 ACJC MA H2 P1 Prelim SolnDokument10 Seiten2008 ACJC MA H2 P1 Prelim SolnAmbrieshKarthikNoch keine Bewertungen
- Trig identities and differentiation formulasDokument5 SeitenTrig identities and differentiation formulaschicken nuggetsNoch keine Bewertungen
- Problem 2.23Dokument2 SeitenProblem 2.23Joe HaddadNoch keine Bewertungen
- 04 Differential Equations Elementary Applications of ODE PDFDokument45 Seiten04 Differential Equations Elementary Applications of ODE PDFMarc Jairro GajudoNoch keine Bewertungen
- Differential Equation For IIT JEEDokument35 SeitenDifferential Equation For IIT JEEAbhishek UttamNoch keine Bewertungen
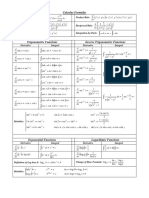
- Calculus FormulasDokument2 SeitenCalculus FormulasMahamud Hossain ArnoNoch keine Bewertungen
- Axial Capacity Formula for Angled MembersDokument3 SeitenAxial Capacity Formula for Angled MembersJustin NiñalNoch keine Bewertungen
- Method of Multiples ScaleDokument16 SeitenMethod of Multiples ScaleJunaidvali ShaikNoch keine Bewertungen
- Chapter 2Dokument7 SeitenChapter 2ali,r98Noch keine Bewertungen
- Further Integration TechniquesDokument39 SeitenFurther Integration TechniquesReginNoch keine Bewertungen
- University Calculus Early Transcendentals 3rd Edition Hass Solutions ManualDokument30 SeitenUniversity Calculus Early Transcendentals 3rd Edition Hass Solutions Manualvictoryad16g100% (23)
- Goldstein Chapter 2.1 PDFDokument15 SeitenGoldstein Chapter 2.1 PDFJulioCesarSanchezRodriguezNoch keine Bewertungen
- Sin X DXDokument11 SeitenSin X DXX ADINoch keine Bewertungen
- The Differential EquationDokument8 SeitenThe Differential EquationMaria RiveraNoch keine Bewertungen
- Ass 2022Dokument10 SeitenAss 2022olemas1984Noch keine Bewertungen
- Formation and Classification of Differential EquationsDokument5 SeitenFormation and Classification of Differential EquationsSadek Ahmed100% (1)
- Chapter 9 - The Power of Calculus PDFDokument24 SeitenChapter 9 - The Power of Calculus PDFKaran ShahNoch keine Bewertungen
- 9.definite Integration, Exercise PDFDokument56 Seiten9.definite Integration, Exercise PDFmaniNoch keine Bewertungen
- Maqola UchunDokument4 SeitenMaqola UchunAzizbek AxmatovNoch keine Bewertungen
- Answers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesVon EverandAnswers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesBewertung: 1.5 von 5 Sternen1.5/5 (2)
- Tables of Weber Functions: Mathematical Tables, Vol. 1Von EverandTables of Weber Functions: Mathematical Tables, Vol. 1Noch keine Bewertungen
- Mathematics 1St First Order Linear Differential Equations 2Nd Second Order Linear Differential Equations Laplace Fourier Bessel MathematicsVon EverandMathematics 1St First Order Linear Differential Equations 2Nd Second Order Linear Differential Equations Laplace Fourier Bessel MathematicsNoch keine Bewertungen
- g7 3j04 Lab - FinalDokument46 Seiteng7 3j04 Lab - Finalyliu8877100% (1)
- Thin-Walled Structures: Miquel Casafont, Magdalena Pastor, Jordi Bonada, Francesc Roure, Teoman Pek OzDokument15 SeitenThin-Walled Structures: Miquel Casafont, Magdalena Pastor, Jordi Bonada, Francesc Roure, Teoman Pek OzFlorin DumbravaNoch keine Bewertungen
- Timber AfkDokument25 SeitenTimber AfkJonathan J LinDuaNoch keine Bewertungen
- Stability of Structures QuestionsDokument2 SeitenStability of Structures QuestionsAnandkumar MukiriNoch keine Bewertungen
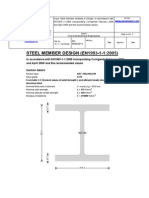
- Sachpazis Steel Member Analysis & Design (EN1993-1!1!2005)Dokument6 SeitenSachpazis Steel Member Analysis & Design (EN1993-1!1!2005)Costas SachpazisNoch keine Bewertungen
- Aisc Manual DG 20 DuctileDesignSteelStructures Part3Dokument309 SeitenAisc Manual DG 20 DuctileDesignSteelStructures Part3khairul4008Noch keine Bewertungen
- Bending, Vibration and Buckling of Simply Supported Thick Orthotropic Rectangular Plates and LaminatesDokument19 SeitenBending, Vibration and Buckling of Simply Supported Thick Orthotropic Rectangular Plates and LaminatesLaxmith ShettyNoch keine Bewertungen
- AssignmentDokument4 SeitenAssignmentSolly Fils De MarierNoch keine Bewertungen
- Initial P DELTADokument2 SeitenInitial P DELTAVinayak PotdarNoch keine Bewertungen
- Engineering Design Report for Cast-Insitu PilesDokument85 SeitenEngineering Design Report for Cast-Insitu Pileshameed6101986Noch keine Bewertungen
- Network Arch Bridge DesignDokument36 SeitenNetwork Arch Bridge DesignSergio Adolfo ParedesNoch keine Bewertungen
- Aqb 1Dokument141 SeitenAqb 1AmineNoch keine Bewertungen
- Castellated Beam Optimization by Using Finite Element Analysis: A Review.Dokument3 SeitenCastellated Beam Optimization by Using Finite Element Analysis: A Review.theijesNoch keine Bewertungen
- Intelligent Design of Industrial Steel Buildings - A BIM ApproachDokument8 SeitenIntelligent Design of Industrial Steel Buildings - A BIM Approachshubham kothawadeNoch keine Bewertungen
- US Japan Shear-wall-paper-US-Japan-Workshop-2000 PDFDokument12 SeitenUS Japan Shear-wall-paper-US-Japan-Workshop-2000 PDFNasarKhanNoch keine Bewertungen
- Plate Girder DesignDokument8 SeitenPlate Girder Designkalpanaadhi100% (1)
- Composite PayloadDokument15 SeitenComposite PayloadDr.Sadaf NadeemNoch keine Bewertungen
- 9 - Analysis and Design of Steel-Concrete Composite SandwichDokument17 Seiten9 - Analysis and Design of Steel-Concrete Composite SandwichAri Endra NasutionNoch keine Bewertungen
- Alignment Chart For Effective Length of Columns in Continuous FramesDokument1 SeiteAlignment Chart For Effective Length of Columns in Continuous Framesivan bolañosNoch keine Bewertungen
- SST 150 M Tower Analysis ReportDokument74 SeitenSST 150 M Tower Analysis ReportErpanBeanTarpoNoch keine Bewertungen
- 02 - Principles of Steel DesignDokument59 Seiten02 - Principles of Steel DesignMuhammad Faisal100% (1)
- Pipelines Design Philosophy OverviewDokument29 SeitenPipelines Design Philosophy OverviewDaniel Dambo100% (4)
- Sectional Properties of SteelDokument72 SeitenSectional Properties of Steeladera1Noch keine Bewertungen
- 01 Mechanical Behaviour of Structural Materials and Structures For SpaceDokument21 Seiten01 Mechanical Behaviour of Structural Materials and Structures For Spacevivek11284Noch keine Bewertungen
- Finite Element Methods of Structural AnalysisDokument98 SeitenFinite Element Methods of Structural Analysiswaqasahmed1983100% (1)
- EDU COURSE SSShhhiiippp SSStttrrruuuccctttuuurrreeesss IIIIDokument174 SeitenEDU COURSE SSShhhiiippp SSStttrrruuuccctttuuurrreeesss IIIIreda redaNoch keine Bewertungen
- Study of effect of trawl gear on submarine pipelinesDokument11 SeitenStudy of effect of trawl gear on submarine pipelinespadmgovi23Noch keine Bewertungen
- Buckling Restrained Braces (BRB) - A ReviewDokument5 SeitenBuckling Restrained Braces (BRB) - A ReviewAnonymous kw8Yrp0R5r100% (1)
- B2 Stability of Structures 2nded Dover2003Dokument9 SeitenB2 Stability of Structures 2nded Dover2003nicu1212Noch keine Bewertungen
- Experimental Study of SS304L Cylindrical Shell WitDokument10 SeitenExperimental Study of SS304L Cylindrical Shell WitVPN NetworkNoch keine Bewertungen