Das könnte Ihnen auch gefallen
- National Football League FRC 2000 Sol SRGBDokument33 SeitenNational Football League FRC 2000 Sol SRGBMick StukesNoch keine Bewertungen
- Water Quality Monitoring and Management: Basis, Technology and Case StudiesVon EverandWater Quality Monitoring and Management: Basis, Technology and Case StudiesNoch keine Bewertungen
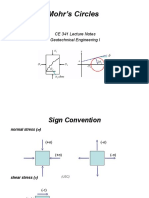
- 9 Mohr CirclesDokument16 Seiten9 Mohr CirclesShabbir OsmaniNoch keine Bewertungen
- Forex Day Trading SystemDokument17 SeitenForex Day Trading SystemSocial Malik100% (1)
- QAQC - Data Quality VAMDokument38 SeitenQAQC - Data Quality VAMQais Alsafasfeh100% (1)
- Water Quality MonitoringDokument31 SeitenWater Quality MonitoringbassbngNoch keine Bewertungen
- Final Selection Criteria Tunnel Cons TraDokument32 SeitenFinal Selection Criteria Tunnel Cons TraMd Mobshshir NayeemNoch keine Bewertungen
- Disclosure To Promote The Right To InformationDokument11 SeitenDisclosure To Promote The Right To InformationnmclaughNoch keine Bewertungen
- 928 Diagnostics Manual v2.7Dokument67 Seiten928 Diagnostics Manual v2.7Roger Sego100% (2)
- Top 100 Chemical CompaniesDokument11 SeitenTop 100 Chemical Companiestawhide_islamicNoch keine Bewertungen
- Pile Cap DesignDokument13 SeitenPile Cap DesignShabbir OsmaniNoch keine Bewertungen
- DFo 2 1Dokument15 SeitenDFo 2 1Donna HernandezNoch keine Bewertungen
- Sustainability 10 01449Dokument27 SeitenSustainability 10 01449Eyob NibretieNoch keine Bewertungen
- Sustainability 10 01449Dokument27 SeitenSustainability 10 01449Eyob NibretieNoch keine Bewertungen
- Full Access1219-1228Dokument10 SeitenFull Access1219-1228PaulineNoch keine Bewertungen
- Sensors: A Water Quality Prediction Method Based On The Deep LSTM Network Considering Correlation in Smart MaricultureDokument20 SeitenSensors: A Water Quality Prediction Method Based On The Deep LSTM Network Considering Correlation in Smart MaricultureDarelle ThorntonNoch keine Bewertungen
- IEEE Sensors14 PDFDokument10 SeitenIEEE Sensors14 PDFChristian CuviNoch keine Bewertungen
- Embedded Based Real-Time Monitoring and Contamination Detection in Drinking Water Distribution SystemDokument6 SeitenEmbedded Based Real-Time Monitoring and Contamination Detection in Drinking Water Distribution SystemInternational Journal of Application or Innovation in Engineering & ManagementNoch keine Bewertungen
- Testing Water Pollution Based On Wireless Sensor Networks and Stochastic Approximation Method: The Case of Flint, Michigan, UsaDokument7 SeitenTesting Water Pollution Based On Wireless Sensor Networks and Stochastic Approximation Method: The Case of Flint, Michigan, UsaAlexandre OliveiraNoch keine Bewertungen
- Water Quality Monitoring and Forecasting SystemDokument75 SeitenWater Quality Monitoring and Forecasting Systemdasarajubhavani05Noch keine Bewertungen
- ProposalDokument4 SeitenProposalengineer mrewaNoch keine Bewertungen
- Jem WWTPDokument12 SeitenJem WWTPvacomanoNoch keine Bewertungen
- Application of The Mathematical Simulation MethodsDokument17 SeitenApplication of The Mathematical Simulation MethodsMarine SleimanNoch keine Bewertungen
- WSN Based Intelligent Water Quality Monitoring System For Aquatic Life Preservation in Volcanic Taal LakeDokument10 SeitenWSN Based Intelligent Water Quality Monitoring System For Aquatic Life Preservation in Volcanic Taal LakeRalph Laurence Garcia VisayaNoch keine Bewertungen
- By Marios M. Polycarpou, James G. Uber, Zhong Wang, Feng Shang, and Mietek BrdysDokument20 SeitenBy Marios M. Polycarpou, James G. Uber, Zhong Wang, Feng Shang, and Mietek BrdysmailmadoNoch keine Bewertungen
- PDF 132821 67441Dokument10 SeitenPDF 132821 67441Anne Jadeite MorenoNoch keine Bewertungen
- SYNOPSISDokument4 SeitenSYNOPSISkiran kumarNoch keine Bewertungen
- 2014-Wireless Sensor Network-Based Water Quality Monitoring SystemDokument5 Seiten2014-Wireless Sensor Network-Based Water Quality Monitoring SystemPoorni JayaramanNoch keine Bewertungen
- RRL 02Dokument2 SeitenRRL 02Zet MiguelNoch keine Bewertungen
- Survey On: "Real Time Water Quality Monitoring System Using Iot and Machine Learning"Dokument3 SeitenSurvey On: "Real Time Water Quality Monitoring System Using Iot and Machine Learning"Snehal100% (1)
- Imen 2016Dokument11 SeitenImen 2016RogerNoch keine Bewertungen
- The Estimation of Water Quality Parameters in Lentic Environments Through Remote Sensing Technologies: A Review of The Past Two DecadesDokument26 SeitenThe Estimation of Water Quality Parameters in Lentic Environments Through Remote Sensing Technologies: A Review of The Past Two DecadesArega GenetieNoch keine Bewertungen
- Detrimental Object Detection in Water Using Machine Learning A ReviewDokument5 SeitenDetrimental Object Detection in Water Using Machine Learning A ReviewInternational Journal of Innovative Science and Research TechnologyNoch keine Bewertungen
- Sensors 19 05086 v2Dokument21 SeitenSensors 19 05086 v2HARSH MALVIYANoch keine Bewertungen
- 40 - Обзор применения машинного обучения для оценки качества водыDokument10 Seiten40 - Обзор применения машинного обучения для оценки качества водыТатьянаNoch keine Bewertungen
- Sensors 12Dokument4 SeitenSensors 12bassbngNoch keine Bewertungen
- Introduction Page 1Dokument7 SeitenIntroduction Page 1jhalakbhardwaj20Noch keine Bewertungen
- Research Paper (Yafra Khan)Dokument6 SeitenResearch Paper (Yafra Khan)Yafra KhanNoch keine Bewertungen
- Sensors & Transducers: Water Quality Monitoring Using Wireless Sensor Network and Smartphone-Based Applications: A ReviewDokument11 SeitenSensors & Transducers: Water Quality Monitoring Using Wireless Sensor Network and Smartphone-Based Applications: A ReviewAlfatah muhumedNoch keine Bewertungen
- Literature Review On Water Supply SystemDokument6 SeitenLiterature Review On Water Supply Systemaflssjrda100% (1)
- Visvesvaraya Technological University Visvesvaraya Technological University Visvesvaraya Technological UniversityDokument5 SeitenVisvesvaraya Technological University Visvesvaraya Technological University Visvesvaraya Technological UniversityAkshay PowarNoch keine Bewertungen
- Docu 13Dokument14 SeitenDocu 13Franco CernaNoch keine Bewertungen
- A Review On Real Time Embedded System For Asscessment of Potable Water QualityDokument4 SeitenA Review On Real Time Embedded System For Asscessment of Potable Water QualityEditor IJRITCCNoch keine Bewertungen
- Ocampo Duque2013Dokument12 SeitenOcampo Duque2013Santiago PuertaNoch keine Bewertungen
- Cheema Paper, Removing PlegDokument40 SeitenCheema Paper, Removing PlegAli Hassan CheemaNoch keine Bewertungen
- Machine Learning Based Detection of Water ContaminDokument9 SeitenMachine Learning Based Detection of Water ContaminDiego MorenoNoch keine Bewertungen
- BY AI WrittenDokument4 SeitenBY AI Writtenzemen TadesseNoch keine Bewertungen
- Development of Systems For Detection, Early Warning, and Control of Pipeline Leakage in Drinking Water Distribution: A Case StudyDokument7 SeitenDevelopment of Systems For Detection, Early Warning, and Control of Pipeline Leakage in Drinking Water Distribution: A Case StudyMihretu AbrhamNoch keine Bewertungen
- Article Jorge Alberto Arciniegas Badillo Code:15201103Dokument1 SeiteArticle Jorge Alberto Arciniegas Badillo Code:15201103joseNoch keine Bewertungen
- Article Jorge Alberto Arciniegas Badillo Code:15201103Dokument1 SeiteArticle Jorge Alberto Arciniegas Badillo Code:15201103joseNoch keine Bewertungen
- Real-Time Water Quality Monitoring Using Internet of Things in ScadaDokument16 SeitenReal-Time Water Quality Monitoring Using Internet of Things in ScadaRafael MirandaNoch keine Bewertungen
- Article Jorge Alberto Arciniegas Badillo Code:15201103Dokument1 SeiteArticle Jorge Alberto Arciniegas Badillo Code:15201103joseNoch keine Bewertungen
- Anfis 3Dokument11 SeitenAnfis 3NURBAIDURINoch keine Bewertungen
- Water QualityDokument17 SeitenWater QualityLuis M GuerreroNoch keine Bewertungen
- Portable Arduino-Based Integrated Water Quality Analyzer With Real-Time Data TransmitterDokument14 SeitenPortable Arduino-Based Integrated Water Quality Analyzer With Real-Time Data TransmitterGlobal Research and Development ServicesNoch keine Bewertungen
- Water Research 2005Dokument26 SeitenWater Research 2005Nessa GameiroNoch keine Bewertungen
- Article Jorge Alberto Arciniegas Badillo Code:15201103Dokument1 SeiteArticle Jorge Alberto Arciniegas Badillo Code:15201103joseNoch keine Bewertungen
- Article Jorge Alberto Arciniegas Badillo Code:15201103Dokument1 SeiteArticle Jorge Alberto Arciniegas Badillo Code:15201103joseNoch keine Bewertungen
- Article Jorge Alberto Arciniegas Badillo Code:15201103Dokument1 SeiteArticle Jorge Alberto Arciniegas Badillo Code:15201103joseNoch keine Bewertungen
- International Journal of Hygiene and Environmental HealthDokument18 SeitenInternational Journal of Hygiene and Environmental HealthAbhay VishwakarmaNoch keine Bewertungen
- Lindhe ProbDokument13 SeitenLindhe Probmichael17ph2003Noch keine Bewertungen
- Integrated Technologies For Low Cost Environmental Monitoring in The Water Bodies of The Philippines: A ReviewDokument13 SeitenIntegrated Technologies For Low Cost Environmental Monitoring in The Water Bodies of The Philippines: A ReviewKshitij YamgarNoch keine Bewertungen
- Full Text 01Dokument137 SeitenFull Text 01Hasleen BeniNoch keine Bewertungen
- Towards Development of An Optimization Model To Identify Contamination Source in A Water Distribution NetworkDokument27 SeitenTowards Development of An Optimization Model To Identify Contamination Source in A Water Distribution NetworkSusiNoch keine Bewertungen
- Water 255071 PublishedDokument26 SeitenWater 255071 PublishedRUBEN JERVES COBONoch keine Bewertungen
- Article Jorge Alberto Arciniegas Badillo Code:15201103Dokument1 SeiteArticle Jorge Alberto Arciniegas Badillo Code:15201103joseNoch keine Bewertungen
- Water 10 00612 v2 PDFDokument18 SeitenWater 10 00612 v2 PDF4AllDemolitionNoch keine Bewertungen
- Water Resources BulletinDokument11 SeitenWater Resources Bulletint.ahmadzadeNoch keine Bewertungen
- Water Resources EngineeringDokument1 SeiteWater Resources EngineeringShabbir OsmaniNoch keine Bewertungen
- CE 311 Course Profile Spring 2019 PDFDokument5 SeitenCE 311 Course Profile Spring 2019 PDFShabbir OsmaniNoch keine Bewertungen
- Determination of Precipitation PatternsDokument26 SeitenDetermination of Precipitation PatternsShabbir OsmaniNoch keine Bewertungen
- HarvardDokument22 SeitenHarvardShabbir Osmani100% (1)
- Makkah Landmarks 2014 PDFDokument43 SeitenMakkah Landmarks 2014 PDFShabbir OsmaniNoch keine Bewertungen
- Plate GirderDokument89 SeitenPlate GirderShabbir OsmaniNoch keine Bewertungen
- LWP ManualDokument14 SeitenLWP ManualShabbir OsmaniNoch keine Bewertungen
- Magnitude and IntensityDokument18 SeitenMagnitude and IntensityShabbir OsmaniNoch keine Bewertungen
- Slope Deflection Method: Name:Abdullah - Al-Mamun ID NO: 10.01.03.079 Section:B YEAR:4 Semester: 2Dokument14 SeitenSlope Deflection Method: Name:Abdullah - Al-Mamun ID NO: 10.01.03.079 Section:B YEAR:4 Semester: 2Shabbir OsmaniNoch keine Bewertungen
- BoqDokument45 SeitenBoqShabbir OsmaniNoch keine Bewertungen
- Ion Exchange - Treatment-2Dokument86 SeitenIon Exchange - Treatment-2Shabbir OsmaniNoch keine Bewertungen
- Topic For Class-1Dokument33 SeitenTopic For Class-1Shabbir OsmaniNoch keine Bewertungen
- Financial Management 2E: Rajiv Srivastava - Dr. Anil Misra Solutions To Numerical ProblemsDokument5 SeitenFinancial Management 2E: Rajiv Srivastava - Dr. Anil Misra Solutions To Numerical ProblemsParesh ShahNoch keine Bewertungen
- Aditya Birla GroupDokument21 SeitenAditya Birla GroupNarendra ThummarNoch keine Bewertungen
- Regional Manager Business Development in Atlanta GA Resume Jay GriffithDokument2 SeitenRegional Manager Business Development in Atlanta GA Resume Jay GriffithJayGriffithNoch keine Bewertungen
- Application of Geoelectric Method For GroundwaterDokument11 SeitenApplication of Geoelectric Method For GroundwaterMunther DhahirNoch keine Bewertungen
- Adjective & VerbsDokument3 SeitenAdjective & VerbsDennis BerkNoch keine Bewertungen
- Not A Toy Sample PDFDokument37 SeitenNot A Toy Sample PDFMartha Paola CorralesNoch keine Bewertungen
- ADC of PIC MicrocontrollerDokument4 SeitenADC of PIC Microcontrollerkillbill100% (2)
- TraceDokument5 SeitenTraceNorma TellezNoch keine Bewertungen
- BJAS - Volume 5 - Issue Issue 1 Part (2) - Pages 275-281Dokument7 SeitenBJAS - Volume 5 - Issue Issue 1 Part (2) - Pages 275-281Vengky UtamiNoch keine Bewertungen
- Upes School of Law Lac & Adr Association: PresentsDokument7 SeitenUpes School of Law Lac & Adr Association: PresentsSuvedhya ReddyNoch keine Bewertungen
- Case Study Single Sign On Solution Implementation Software Luxoft For Ping IdentityDokument5 SeitenCase Study Single Sign On Solution Implementation Software Luxoft For Ping IdentityluxoftNoch keine Bewertungen
- Grade 9 Science Biology 1 DLPDokument13 SeitenGrade 9 Science Biology 1 DLPManongdo AllanNoch keine Bewertungen
- Syllabus PDFDokument3 SeitenSyllabus PDFBibin Raj B SNoch keine Bewertungen
- Battery Guide - 2021Dokument27 SeitenBattery Guide - 2021Mario LaurieNoch keine Bewertungen
- FE CH 5 AnswerDokument12 SeitenFE CH 5 AnswerAntony ChanNoch keine Bewertungen
- Power Curbers, Inc. v. E. D. Etnyre & Co. and A. E. Finley & Associates, Inc., 298 F.2d 484, 4th Cir. (1962)Dokument18 SeitenPower Curbers, Inc. v. E. D. Etnyre & Co. and A. E. Finley & Associates, Inc., 298 F.2d 484, 4th Cir. (1962)Scribd Government DocsNoch keine Bewertungen
- Types of Water Pump and Applications in Power Plant.Dokument6 SeitenTypes of Water Pump and Applications in Power Plant.abbas bilalNoch keine Bewertungen
- 1.SDH Basics PDFDokument37 Seiten1.SDH Basics PDFsafder wahabNoch keine Bewertungen
- Colorfastness of Zippers To Light: Standard Test Method ForDokument2 SeitenColorfastness of Zippers To Light: Standard Test Method ForShaker QaidiNoch keine Bewertungen
- Predator U7135 ManualDokument36 SeitenPredator U7135 Manualr17g100% (1)
- BS 7974 2019Dokument68 SeitenBS 7974 2019bcyt00Noch keine Bewertungen
- Iaea Tecdoc 1092Dokument287 SeitenIaea Tecdoc 1092Andres AracenaNoch keine Bewertungen
- Computers in Industry: Hugh Boyes, Bil Hallaq, Joe Cunningham, Tim Watson TDokument12 SeitenComputers in Industry: Hugh Boyes, Bil Hallaq, Joe Cunningham, Tim Watson TNawabMasidNoch keine Bewertungen