Das könnte Ihnen auch gefallen
- LevelsetnotesDokument7 SeitenLevelsetnotesyoyoyo yoNoch keine Bewertungen
- Remarks On Chapter 5 in L. Trefethen: Spectral Methods in MATLABDokument8 SeitenRemarks On Chapter 5 in L. Trefethen: Spectral Methods in MATLABTri NguyenNoch keine Bewertungen
- Sympy: Symbolic Computing in Python: Supplementary MaterialDokument16 SeitenSympy: Symbolic Computing in Python: Supplementary MaterialCreativ PinoyNoch keine Bewertungen
- A Comment On Methods To Deal With Divergent Series and IntegralsDokument14 SeitenA Comment On Methods To Deal With Divergent Series and Integralseljose1234100% (2)
- H2 Mathematics Cheat Sheet by Sean LimDokument27 SeitenH2 Mathematics Cheat Sheet by Sean LimGale HawthorneNoch keine Bewertungen
- 1 Numerical Evaluation of The Zeta Function at A Given PointDokument10 Seiten1 Numerical Evaluation of The Zeta Function at A Given PointELIAS ANKAHNoch keine Bewertungen
- Calc 1 Lecture Notes Section 4.7 1 of 8: FXDXM FC X Ba X N C A XiDokument8 SeitenCalc 1 Lecture Notes Section 4.7 1 of 8: FXDXM FC X Ba X N C A Ximasyuki1979Noch keine Bewertungen
- Pr (X ≤x) =F (x) = 1 2πσ 1 2πσ: Φ (z) = e dtDokument8 SeitenPr (X ≤x) =F (x) = 1 2πσ 1 2πσ: Φ (z) = e dtKimondo KingNoch keine Bewertungen
- Numerical Methods For CSE Problem Sheet 4: Problem 1. Order of Convergence From Error Recursion (Core Prob-Lem)Dokument14 SeitenNumerical Methods For CSE Problem Sheet 4: Problem 1. Order of Convergence From Error Recursion (Core Prob-Lem)DANIEL ALEJANDRO VARGAS UZURIAGANoch keine Bewertungen
- Conformal Field NotesDokument7 SeitenConformal Field NotesSrivatsan BalakrishnanNoch keine Bewertungen
- A Simple Yet Efficient Two Step Fifth Order Weighted Newton Method For Nonlinear ModelsDokument23 SeitenA Simple Yet Efficient Two Step Fifth Order Weighted Newton Method For Nonlinear ModelsAntmel Rodriguez CabralNoch keine Bewertungen
- High Performance ECDSA Over F Based On Java With Hardware AccelerationDokument14 SeitenHigh Performance ECDSA Over F Based On Java With Hardware Accelerationsujak34Noch keine Bewertungen
- Integral CalculusDokument120 SeitenIntegral CalculusBernadette Boncolmo100% (3)
- Equi-Statistical Convergence of Positive Linear Operators: Sevda Karaku S, Kamil DemirciDokument12 SeitenEqui-Statistical Convergence of Positive Linear Operators: Sevda Karaku S, Kamil DemirciYiğit ErpakNoch keine Bewertungen
- Covariances of ARMA ProcessesDokument9 SeitenCovariances of ARMA ProcessesRyan TeehanNoch keine Bewertungen
- Adaptive Control Design and AnalysisDokument45 SeitenAdaptive Control Design and Analysishind90Noch keine Bewertungen
- Limits, First Principals, Rules of Differentiation and The Equation of A Tangent To A FunctionDokument8 SeitenLimits, First Principals, Rules of Differentiation and The Equation of A Tangent To A FunctionVince VinceNoch keine Bewertungen
- Argyros 2019Dokument11 SeitenArgyros 2019Amir NaseemNoch keine Bewertungen
- Applied Mathematics Letters: S.A. MohiuddineDokument5 SeitenApplied Mathematics Letters: S.A. MohiuddineshivaniNoch keine Bewertungen
- Integration TechniquesDokument18 SeitenIntegration Techniquesஏம்மனுஎல்லெ செலேச்டினோNoch keine Bewertungen
- 24th Maths Shift 1Dokument16 Seiten24th Maths Shift 1Vaid KulkarniNoch keine Bewertungen
- Poisson's Equation by The FEM Using A MATLAB Mesh Generator: 4u F U 0 On DDokument6 SeitenPoisson's Equation by The FEM Using A MATLAB Mesh Generator: 4u F U 0 On DRuben Dario Guerrero ENoch keine Bewertungen
- MAT 215 Fall 2020 Monthly Assignment Set: CDokument3 SeitenMAT 215 Fall 2020 Monthly Assignment Set: CNABIHA MUSTAQEEMNoch keine Bewertungen
- PerceptronDokument3 SeitenPerceptronapi-3814100Noch keine Bewertungen
- 4381 14376 1 PBDokument21 Seiten4381 14376 1 PBsanjica_307519190Noch keine Bewertungen
- Legendre PolynomialsDokument6 SeitenLegendre PolynomialsFrancis Jr CastroNoch keine Bewertungen
- A Differential Equation For Modeling Nesterov'sDokument18 SeitenA Differential Equation For Modeling Nesterov'sRest TabernacleNoch keine Bewertungen
- 1 s2.0 S0022247X04003105 MainDokument24 Seiten1 s2.0 S0022247X04003105 MainKritik KumarNoch keine Bewertungen
- On The Series Å K 1 (3kk) - 1k-nxkDokument11 SeitenOn The Series Å K 1 (3kk) - 1k-nxkapi-26401608Noch keine Bewertungen
- Dorcak Petras 2007 PDFDokument7 SeitenDorcak Petras 2007 PDFVignesh RamakrishnanNoch keine Bewertungen
- The Renormalization Group - Lecture Notes (Condensed) : Jan Tuzlić OffermannDokument6 SeitenThe Renormalization Group - Lecture Notes (Condensed) : Jan Tuzlić OffermannJanNoch keine Bewertungen
- TVDMMDokument14 SeitenTVDMMKhalandar BashaNoch keine Bewertungen
- Introduction To Rstudio: Creating VectorsDokument11 SeitenIntroduction To Rstudio: Creating VectorsMandeep SinghNoch keine Bewertungen
- Section 3. Fourier Series and Periodic Functions: F (X) F (X + P) For Any X, and Fixed Period PDokument31 SeitenSection 3. Fourier Series and Periodic Functions: F (X) F (X + P) For Any X, and Fixed Period PboucyNoch keine Bewertungen
- Solutions To Exercises 7.1: X Has Period TDokument16 SeitenSolutions To Exercises 7.1: X Has Period TTri Phương NguyễnNoch keine Bewertungen
- Integral Calculus Module 2Dokument3 SeitenIntegral Calculus Module 2AldzNoch keine Bewertungen
- Error FunDokument10 SeitenError FunIkram Ben SalemNoch keine Bewertungen
- Cs 229, Autumn 2016 Problem Set #2: Naive Bayes, SVMS, and TheoryDokument20 SeitenCs 229, Autumn 2016 Problem Set #2: Naive Bayes, SVMS, and TheoryZeeshan Ali SayyedNoch keine Bewertungen
- StabDokument12 SeitenStabSimos SoldatosNoch keine Bewertungen
- Exam - 2011 10 28Dokument5 SeitenExam - 2011 10 28lieth-4Noch keine Bewertungen
- Exact Region of Stability For An Investment Plan With Three ParametersDokument8 SeitenExact Region of Stability For An Investment Plan With Three ParametersChecozNoch keine Bewertungen
- Template Chaos CircuitDokument14 SeitenTemplate Chaos CircuitEnrique PriceNoch keine Bewertungen
- Advanced Computational Methods: Numerical IntegrationDokument59 SeitenAdvanced Computational Methods: Numerical IntegrationMohammed HamdyNoch keine Bewertungen
- Control Most Impo FileDokument72 SeitenControl Most Impo FileSumit BahlNoch keine Bewertungen
- Homework 8 Solutions: Stat 516Dokument2 SeitenHomework 8 Solutions: Stat 516Putri NurrifkadillahNoch keine Bewertungen
- Smooth Convex Minimization ProblemsDokument28 SeitenSmooth Convex Minimization ProblemstahirNoch keine Bewertungen
- Wits ElmajidiDokument11 SeitenWits ElmajidielmajidiNoch keine Bewertungen
- John Surfaces Associated With A Class of Harmonic MappingsDokument22 SeitenJohn Surfaces Associated With A Class of Harmonic MappingsJhon Alexander Ordonez CastroNoch keine Bewertungen
- UNIT - IV Fourier TransformsDokument66 SeitenUNIT - IV Fourier Transformsdharanidec15Noch keine Bewertungen
- ECS 455: Mobile Communications Fourier Transform and Communication SystemsDokument25 SeitenECS 455: Mobile Communications Fourier Transform and Communication SystemsJeevan BasnyatNoch keine Bewertungen
- Fourrier Series NotesDokument31 SeitenFourrier Series NotesVashish RamrechaNoch keine Bewertungen
- A Remark On The Existence of Positive Radial Solutions To A Hessian SystemDokument9 SeitenA Remark On The Existence of Positive Radial Solutions To A Hessian SystemCovei Dragos-PatruNoch keine Bewertungen
- A Maximum Principle Applied To Quasi-Geostrophic Equations: Mathematical PhysicsDokument18 SeitenA Maximum Principle Applied To Quasi-Geostrophic Equations: Mathematical PhysicsMorgan MendozaNoch keine Bewertungen
- Gen. Math Summary of Topics2Dokument7 SeitenGen. Math Summary of Topics2Rann MNoch keine Bewertungen
- Numerical MethodsDokument29 SeitenNumerical MethodsjonahNoch keine Bewertungen
- 1 s2.0 S0022314X16000780 Main PDFDokument22 Seiten1 s2.0 S0022314X16000780 Main PDFLAXMI MAJHINoch keine Bewertungen
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Von EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Noch keine Bewertungen
- The New Generation of Operations Research Methods in Supply Chain Optimization: A ReviewDokument23 SeitenThe New Generation of Operations Research Methods in Supply Chain Optimization: A ReviewMisty NguyễnNoch keine Bewertungen
- FDSFSDDokument6 SeitenFDSFSDPotatoNoch keine Bewertungen
- Minor New CurrDokument20 SeitenMinor New CurrAnanyaNoch keine Bewertungen
- Jun 30219 ADokument48 SeitenJun 30219 ASatish MopkarNoch keine Bewertungen
- Skyline Daa 1Dokument8 SeitenSkyline Daa 1Boul chandra GaraiNoch keine Bewertungen
- Modelos Lineales Generalizados Con Ejemplos en RDokument573 SeitenModelos Lineales Generalizados Con Ejemplos en RJuan Manuel AntónNoch keine Bewertungen
- CH 23 FDokument24 SeitenCH 23 FAnonymous lnJTLxcNoch keine Bewertungen
- The Theories of ManagementDokument10 SeitenThe Theories of ManagementThea ToñacaoNoch keine Bewertungen
- Q3 - Wk3-4 - STATISTICS AND PROBABILITYDokument28 SeitenQ3 - Wk3-4 - STATISTICS AND PROBABILITYpabloNoch keine Bewertungen
- Sol AssignmentDokument5 SeitenSol AssignmentLeia SeunghoNoch keine Bewertungen
- Bessel's Differential Equation: Taylor Series Real NumbersDokument7 SeitenBessel's Differential Equation: Taylor Series Real NumbersOzell SandersNoch keine Bewertungen
- The Fraction Cheat SheetDokument1 SeiteThe Fraction Cheat SheettxcrudeNoch keine Bewertungen
- Hybrid Numericalanalytical Approach To Nonlinear Diffusion Problems Numer Heat Transf Part BDokument11 SeitenHybrid Numericalanalytical Approach To Nonlinear Diffusion Problems Numer Heat Transf Part BGabriel SaavedraNoch keine Bewertungen
- De-Lecture 9 by Engineer MarcosDokument5 SeitenDe-Lecture 9 by Engineer Marcosmelenyo tuqueroNoch keine Bewertungen
- DiferencijalnaDokument266 SeitenDiferencijalnaviduka0101Noch keine Bewertungen
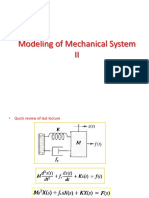
- Modeling of Mechanical System IIDokument11 SeitenModeling of Mechanical System IIshrey saxenaNoch keine Bewertungen
- J.P. Rizal Ext. West Rembo, Makati CityDokument2 SeitenJ.P. Rizal Ext. West Rembo, Makati CityQ Annang TomanggongNoch keine Bewertungen
- M.O.E.M.S Practice Packet 2016 Division E Contest 3 Problems With Solutions and AnswersDokument3 SeitenM.O.E.M.S Practice Packet 2016 Division E Contest 3 Problems With Solutions and AnswersRocket Fire83% (6)
- Formal Truth & Material Truth Self Evidence Theory and Coherence TheoryDokument9 SeitenFormal Truth & Material Truth Self Evidence Theory and Coherence TheoryAudhora IslammNoch keine Bewertungen
- AbstractDokument2 SeitenAbstractAleymar Arturo Travi JojoaNoch keine Bewertungen
- Topic5 Linear TransformationsDokument25 SeitenTopic5 Linear TransformationsFilipus Boby Setiawan BudimanNoch keine Bewertungen
- Low Density Parity Check (LDPC) CodesDokument17 SeitenLow Density Parity Check (LDPC) Codesvrashikesh patil100% (1)
- Sgantzos K Ga-Hscbb17Dokument7 SeitenSgantzos K Ga-Hscbb17floorman67Noch keine Bewertungen
- Detailed Lesson PlanDokument10 SeitenDetailed Lesson PlanJeffreynald Arante Francisco83% (23)
- 0606 s14 QP 13Dokument16 Seiten0606 s14 QP 13AKRAMNoch keine Bewertungen
- Bayesian Belief NetworkDokument30 SeitenBayesian Belief NetworkGuru75Noch keine Bewertungen
- 448 ACT M1 - Geometry Q-ADokument132 Seiten448 ACT M1 - Geometry Q-AZara QaramsehNoch keine Bewertungen
- Eulers Method Eulers Modified MethodDokument13 SeitenEulers Method Eulers Modified MethodKauser AhmedNoch keine Bewertungen
- Candy IADokument15 SeitenCandy IAEmilie TrangNoch keine Bewertungen
- Johor Smktinggikluang Mathst p1 2015 QaDokument5 SeitenJohor Smktinggikluang Mathst p1 2015 QalingbooNoch keine Bewertungen