Das könnte Ihnen auch gefallen
- Multidimensional Real Analysis 1: DifferentiationDokument441 SeitenMultidimensional Real Analysis 1: DifferentiationDark_Harles100% (5)
- Functional Analysis 2020-21aDokument52 SeitenFunctional Analysis 2020-21aKris KongNoch keine Bewertungen
- Large Scale Geometry PDFDokument203 SeitenLarge Scale Geometry PDFKhaled LotfyNoch keine Bewertungen
- Convergence in Topological Spaces. Nets.: 1 PreliminariesDokument5 SeitenConvergence in Topological Spaces. Nets.: 1 PreliminariesANDRES DAVID GUEVARA MENDOZANoch keine Bewertungen
- 07b Seminorms PDFDokument6 Seiten07b Seminorms PDFAlfredo Sotelo PejerreyNoch keine Bewertungen
- Solutions To Problem Set 4: ConnectednessDokument5 SeitenSolutions To Problem Set 4: ConnectednessDaniel E. Quintero PamplonaNoch keine Bewertungen
- 04 - Congergent SequencesDokument3 Seiten04 - Congergent SequencesANDRES DAVID GUEVARA MENDOZANoch keine Bewertungen
- Urysohn's LemmaDokument3 SeitenUrysohn's LemmaArup AbinashNoch keine Bewertungen
- Alaoglu's TheoremDokument5 SeitenAlaoglu's TheoremBelsty Wale KibretNoch keine Bewertungen
- 1 Review of Topology: 1.1 Metric SpacesDokument4 Seiten1 Review of Topology: 1.1 Metric SpacesPrivate27Noch keine Bewertungen
- Almost Continuous Function in TopologyDokument39 SeitenAlmost Continuous Function in TopologyS.Ramesh Senthil kumarNoch keine Bewertungen
- The Weak Topology of Locally Convex Spaces and The Weak - Topology of Their DualsDokument11 SeitenThe Weak Topology of Locally Convex Spaces and The Weak - Topology of Their DualsEDU CIPANANoch keine Bewertungen
- Topology Ii Unit-Iii DefinitionDokument13 SeitenTopology Ii Unit-Iii DefinitionPearlpavithra InnasiNoch keine Bewertungen
- Lecture 3Dokument10 SeitenLecture 3Karoomi GoNoch keine Bewertungen
- Arzela-Ascoli Theorem and ApplicationsDokument3 SeitenArzela-Ascoli Theorem and ApplicationsAbhishek SenapatiNoch keine Bewertungen
- 7500 CDokument17 Seiten7500 Csalmanjokar8877Noch keine Bewertungen
- Urysohn's Lemma: 22M:132 Fall 07 J. SimonDokument4 SeitenUrysohn's Lemma: 22M:132 Fall 07 J. SimonMohammad SaubanNoch keine Bewertungen
- Applications of Baire Category TheoremDokument11 SeitenApplications of Baire Category TheoremUrvashiNoch keine Bewertungen
- Point-Set Topology 2: 1 Connectedness and Path-ConnectednessDokument5 SeitenPoint-Set Topology 2: 1 Connectedness and Path-ConnectednessNilesh PatilNoch keine Bewertungen
- Sequences and Nets in TopologyDokument17 SeitenSequences and Nets in TopologyErika MendozaNoch keine Bewertungen
- An Application of Tychonoff's Theorem, To Prove The Compactness Theorem For Propositional Logic.Dokument2 SeitenAn Application of Tychonoff's Theorem, To Prove The Compactness Theorem For Propositional Logic.Mariusz PopieluchNoch keine Bewertungen
- MSM3P22/MSM4P22 Further Complex Variable Theory & General Topology Solutions To Problem Sheet 4Dokument5 SeitenMSM3P22/MSM4P22 Further Complex Variable Theory & General Topology Solutions To Problem Sheet 4Jeoff Libo-onNoch keine Bewertungen
- Lecture 2Dokument7 SeitenLecture 2vinay PALNoch keine Bewertungen
- Introductory Functional Analysis With ApplicationsDokument14 SeitenIntroductory Functional Analysis With ApplicationsAmir NazirNoch keine Bewertungen
- Sheet 4Dokument2 SeitenSheet 4dqalombardiNoch keine Bewertungen
- Homework 1Dokument3 SeitenHomework 1Hoang Trung NguyenNoch keine Bewertungen
- NetsDokument2 SeitenNetsMathSpaceNoch keine Bewertungen
- Solutions To Problem Set 3: Limits and ClosuresDokument4 SeitenSolutions To Problem Set 3: Limits and ClosuresanthalyaNoch keine Bewertungen
- Solutions 3 - 640Dokument3 SeitenSolutions 3 - 640Calixto RhenalsNoch keine Bewertungen
- Math 535 - General TopologyDokument40 SeitenMath 535 - General TopologyFabian MolinaNoch keine Bewertungen
- Study Guide - TopologyDokument50 SeitenStudy Guide - Topologyexplorer58Noch keine Bewertungen
- Measurable SelectionDokument17 SeitenMeasurable SelectionpochiasdfNoch keine Bewertungen
- Teste1 ResolDokument3 SeitenTeste1 ResolEdmilson BarrosNoch keine Bewertungen
- Nets and FilterDokument18 SeitenNets and FilterGamalielNoch keine Bewertungen
- Topological Approach To Chain Recurrence in Continuous Dynamical SystemsDokument8 SeitenTopological Approach To Chain Recurrence in Continuous Dynamical SystemsAbdullah BoufousNoch keine Bewertungen
- 1 Complete Metric SpacesDokument5 Seiten1 Complete Metric SpacesKuldeepNoch keine Bewertungen
- 10 - Quotient Spaces PDFDokument8 Seiten10 - Quotient Spaces PDFNathalie AlejandraNoch keine Bewertungen
- Topological Mathematical PapersDokument3 SeitenTopological Mathematical PapersDefinitely JunkieNoch keine Bewertungen
- Quotient Topology: S. Kumaresan School of Math. and Stat. University of Hyderabad Hyderabad 500046Dokument8 SeitenQuotient Topology: S. Kumaresan School of Math. and Stat. University of Hyderabad Hyderabad 500046JohnNeftaliChinoCalderonNoch keine Bewertungen
- Distribucion de Los Numeros Primos (Jorge Sanchez, Miguel Corona)Dokument123 SeitenDistribucion de Los Numeros Primos (Jorge Sanchez, Miguel Corona)Oswaldo VasquezNoch keine Bewertungen
- Final Exam Practice Questions: Selected SolutionsDokument22 SeitenFinal Exam Practice Questions: Selected SolutionsClaudia GimenaNoch keine Bewertungen
- MAT480 Hw8 SolutionDokument4 SeitenMAT480 Hw8 SolutionAlejandro GomezNoch keine Bewertungen
- The Strong Ekeland Variational Principle: Tomonari SuzukiDokument8 SeitenThe Strong Ekeland Variational Principle: Tomonari SuzukiFranklin GálvezNoch keine Bewertungen
- Differentiable Manifolds: Nigel HitchinDokument30 SeitenDifferentiable Manifolds: Nigel HitchinEmkafsNoch keine Bewertungen
- Lec 10Dokument7 SeitenLec 10matbaila247Noch keine Bewertungen
- The Stone-Cech Compactification and The Space of UltrafiltersDokument10 SeitenThe Stone-Cech Compactification and The Space of UltrafiltersJulian CanoNoch keine Bewertungen
- Assignment 1 (2016) SolutionDokument3 SeitenAssignment 1 (2016) SolutionShambhavi SinghNoch keine Bewertungen
- MergedDokument66 SeitenMergedSoumyajoy DasNoch keine Bewertungen
- Polyrakis, 2019. Atomic Sublattices and Basic Derivatives in Finance.Dokument20 SeitenPolyrakis, 2019. Atomic Sublattices and Basic Derivatives in Finance.Maria PapadakiNoch keine Bewertungen
- 1 Baire's Theorem and Its ApplicationsDokument5 Seiten1 Baire's Theorem and Its ApplicationsJosephPmNoch keine Bewertungen
- Hartshorne Algebraic Geometry SolutionsDokument130 SeitenHartshorne Algebraic Geometry SolutionsFrank WanNoch keine Bewertungen
- Essential TopologyDokument6 SeitenEssential TopologyMalik MajidNoch keine Bewertungen
- Rudin 4Dokument20 SeitenRudin 4Cody SageNoch keine Bewertungen
- Functional Analysis Lecture NotesDokument52 SeitenFunctional Analysis Lecture NotesTianyu TaoNoch keine Bewertungen
- Not As Funcional G MoralesDokument28 SeitenNot As Funcional G MoralesDany DominicNoch keine Bewertungen
- 00 Metric SpacesDokument4 Seiten00 Metric Spacesapi-3808925Noch keine Bewertungen
- X When No Danger of Confusion May Arise (Namely, Always) We Will Forget ToDokument21 SeitenX When No Danger of Confusion May Arise (Namely, Always) We Will Forget ToHoracioCastellanosMuñoaNoch keine Bewertungen
- Section3 PDFDokument10 SeitenSection3 PDFMnjNoch keine Bewertungen
- Tychonoff TheoremDokument3 SeitenTychonoff TheoremBratnokNoch keine Bewertungen
- Elgenfunction Expansions Associated with Second Order Differential EquationsVon EverandElgenfunction Expansions Associated with Second Order Differential EquationsNoch keine Bewertungen
- DS 18031 Designer To Analyst Topology WhitepaperDokument8 SeitenDS 18031 Designer To Analyst Topology WhitepaperANDRES DAVID GUEVARA MENDOZANoch keine Bewertungen
- 3D Topology Optimization Using ConvolutionalDokument21 Seiten3D Topology Optimization Using ConvolutionalANDRES DAVID GUEVARA MENDOZANoch keine Bewertungen
- Quasi-Arithmetic FiltersDokument33 SeitenQuasi-Arithmetic FiltersANDRES DAVID GUEVARA MENDOZANoch keine Bewertungen
- Tenta17mars PDFDokument8 SeitenTenta17mars PDFANDRES DAVID GUEVARA MENDOZANoch keine Bewertungen
- Absolutely Convergent Is Also ConvergentDokument1 SeiteAbsolutely Convergent Is Also ConvergentAzeemAnwarNoch keine Bewertungen
- Topology A Chapter For The Mathematics++ Lecture Notes: Ji R I Matou Sek Rev. 2/XII/2014 JMDokument68 SeitenTopology A Chapter For The Mathematics++ Lecture Notes: Ji R I Matou Sek Rev. 2/XII/2014 JMANDRES DAVID GUEVARA MENDOZANoch keine Bewertungen
- Sola 2Dokument8 SeitenSola 2ANDRES DAVID GUEVARA MENDOZANoch keine Bewertungen
- Boundary and Exterior of A Multiset Topology (#381316) - 407650Dokument10 SeitenBoundary and Exterior of A Multiset Topology (#381316) - 407650ANDRES DAVID GUEVARA MENDOZANoch keine Bewertungen
- Topology BoundariesDokument26 SeitenTopology BoundariesANDRES DAVID GUEVARA MENDOZANoch keine Bewertungen
- Topology WorkingDokument407 SeitenTopology WorkingANDRES DAVID GUEVARA MENDOZANoch keine Bewertungen
- Topology BiologyDokument20 SeitenTopology BiologyANDRES DAVID GUEVARA MENDOZANoch keine Bewertungen
- Topology Uniform ConvergenceDokument16 SeitenTopology Uniform ConvergenceANDRES DAVID GUEVARA MENDOZANoch keine Bewertungen
- DCP69 PDFDokument12 SeitenDCP69 PDFANDRES DAVID GUEVARA MENDOZANoch keine Bewertungen
- Topologicla ApplicationsDokument6 SeitenTopologicla ApplicationsANDRES DAVID GUEVARA MENDOZANoch keine Bewertungen
- On Convergence Speedup in Topology OptimizationDokument2 SeitenOn Convergence Speedup in Topology OptimizationANDRES DAVID GUEVARA MENDOZANoch keine Bewertungen
- Differentiable ManofoldsDokument132 SeitenDifferentiable ManofoldsANDRES DAVID GUEVARA MENDOZANoch keine Bewertungen
- Convergence of NetsDokument12 SeitenConvergence of NetsANDRES DAVID GUEVARA MENDOZANoch keine Bewertungen
- Alternative Medicine: The Role and Meaning of Ritual in The Placebo EffectDokument37 SeitenAlternative Medicine: The Role and Meaning of Ritual in The Placebo EffectANDRES DAVID GUEVARA MENDOZANoch keine Bewertungen
- Jesus Is Not GodDokument2 SeitenJesus Is Not GodANDRES DAVID GUEVARA MENDOZANoch keine Bewertungen
- EE263 Homework 5 SolutionsDokument15 SeitenEE263 Homework 5 SolutionsEdwin Jonathan Urrea GomezNoch keine Bewertungen
- 10 VectorsDokument19 Seiten10 VectorsHarsh RaviNoch keine Bewertungen
- VectorApplicationsInDSDokument31 SeitenVectorApplicationsInDSSara NukhoNoch keine Bewertungen
- Data Science in Spark With Sparklyr::: Cheat SheetDokument2 SeitenData Science in Spark With Sparklyr::: Cheat SheetDaniel CoelhoNoch keine Bewertungen
- Vector Algebra: 5 LecturesDokument18 SeitenVector Algebra: 5 LecturestutulkarNoch keine Bewertungen
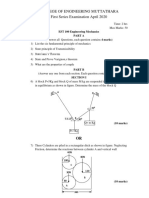
- College of Engineering Muttathara First Series Examination April 2020Dokument2 SeitenCollege of Engineering Muttathara First Series Examination April 2020Ahammed SalamNoch keine Bewertungen
- Law of PolygonDokument7 SeitenLaw of Polygonuser10150% (10)
- S Kuliah06 (Position Vector)Dokument39 SeitenS Kuliah06 (Position Vector)Fattihi EkhmalNoch keine Bewertungen
- Assignment 4 (Sol.) : Reinforcement LearningDokument6 SeitenAssignment 4 (Sol.) : Reinforcement Learningsimar rocksNoch keine Bewertungen
- ShowfileDokument130 SeitenShowfileJayNoch keine Bewertungen
- Lab 6 Applied Linear Algebra For It - 501032: 1 ExercisesDokument3 SeitenLab 6 Applied Linear Algebra For It - 501032: 1 ExercisesAnh QuocNoch keine Bewertungen
- MHS Physics Problems Chapter 1Dokument27 SeitenMHS Physics Problems Chapter 1Dina Ashraf0% (1)
- Math SymbolsDokument22 SeitenMath SymbolsHoang GiangNoch keine Bewertungen
- ABSTRACT MEASURE THEORY Analysis Study GuideDokument27 SeitenABSTRACT MEASURE THEORY Analysis Study GuidesamyaNoch keine Bewertungen
- Applied Math NotesDokument67 SeitenApplied Math NotesUgo Buslacchi100% (1)
- Solutions To Homework Problems: November 25, 2015Dokument48 SeitenSolutions To Homework Problems: November 25, 2015Jeoff Libo-onNoch keine Bewertungen
- Kvaal ESQC22 Lecture2Dokument13 SeitenKvaal ESQC22 Lecture2kabiNoch keine Bewertungen
- Complex Algebra and The Complex PlaneDokument25 SeitenComplex Algebra and The Complex Planevic12340590% (1)
- (Mathematics and Statistics) Alexander Kukush - Gaussian Measures in Hilbert Space - Construction and Properties-Wiley-IsTE (2020) 2Dokument263 Seiten(Mathematics and Statistics) Alexander Kukush - Gaussian Measures in Hilbert Space - Construction and Properties-Wiley-IsTE (2020) 2Fernando CorrêaNoch keine Bewertungen
- Real and Complex Operator Norms Between Quasi-Banach L SpacesDokument24 SeitenReal and Complex Operator Norms Between Quasi-Banach L SpacesFidelHuamanAlarconNoch keine Bewertungen
- Adaptive Control, Sastry and BodsonDokument223 SeitenAdaptive Control, Sastry and BodsonEnrique HernándezNoch keine Bewertungen
- Functional Analysis PDF PDFDokument184 SeitenFunctional Analysis PDF PDFaliNoch keine Bewertungen
- Similarity MeasuresDokument48 SeitenSimilarity MeasuresArunaNoch keine Bewertungen
- Unit12 Euclidean SpaceDokument18 SeitenUnit12 Euclidean SpaceThành NhanNoch keine Bewertungen
- BBBBDokument51 SeitenBBBBUzoma Nnaemeka TeflondonNoch keine Bewertungen
- 10 - Operation ResearchDokument219 Seiten10 - Operation ResearchArun muraliNoch keine Bewertungen
- Lesson 6 Similarities KNNDokument25 SeitenLesson 6 Similarities KNNDyuti IslamNoch keine Bewertungen