Das könnte Ihnen auch gefallen
- Closed Loop Operation of Buck DC-DC Converter Using Discrete Pi ControlDokument4 SeitenClosed Loop Operation of Buck DC-DC Converter Using Discrete Pi ControlPrajeesh PrakashNoch keine Bewertungen
- Power Lab 3 (Simulation)Dokument2 SeitenPower Lab 3 (Simulation)rampagenerfblasterNoch keine Bewertungen
- ADE - Pspice Lab ManualDokument12 SeitenADE - Pspice Lab ManualShashiNoch keine Bewertungen
- Flyback ConverterDokument19 SeitenFlyback Convertergpalencia_1Noch keine Bewertungen
- Cuk Control PDFDokument57 SeitenCuk Control PDFPraveen PJNoch keine Bewertungen
- Astable MultivibratorDokument3 SeitenAstable MultivibratorTushar GuptaNoch keine Bewertungen
- 0 Lab6 Astable MultivibratorDokument3 Seiten0 Lab6 Astable Multivibratorchandu3072002Noch keine Bewertungen
- Mathematical Modelling Boost ConverterDokument12 SeitenMathematical Modelling Boost ConverterCHERU ABINETNoch keine Bewertungen
- New CS ManualDokument68 SeitenNew CS ManualmindsharpNoch keine Bewertungen
- Sepic Converter Design and Operation: by Gregory SharpDokument21 SeitenSepic Converter Design and Operation: by Gregory SharpSingam SridharNoch keine Bewertungen
- Computer Modeling and Simulation of PWM Converter CircuitsDokument27 SeitenComputer Modeling and Simulation of PWM Converter CircuitsskrtamilNoch keine Bewertungen
- Project Report On OPDokument13 SeitenProject Report On OPVarun PathaniaNoch keine Bewertungen
- M4 Micro OneNoteDokument6 SeitenM4 Micro OneNoteAryan RaiNoch keine Bewertungen
- Cycle1 ManualDokument24 SeitenCycle1 ManualSanthosh krishna. UNoch keine Bewertungen
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Von EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Noch keine Bewertungen
- Control System Practical (Eec376) V Semester, B. Tech. (EE)Dokument5 SeitenControl System Practical (Eec376) V Semester, B. Tech. (EE)uttamNoch keine Bewertungen
- Simulation of A Phase Lock Loop Using MATLAB SimulinkDokument3 SeitenSimulation of A Phase Lock Loop Using MATLAB SimulinkNK-NGAMNoch keine Bewertungen
- l24 PDFDokument27 Seitenl24 PDFAshok KumarNoch keine Bewertungen
- LaboratoryManualForOperationalAmplifiersAndLinearICs 3EDokument130 SeitenLaboratoryManualForOperationalAmplifiersAndLinearICs 3EGerald TiocsonNoch keine Bewertungen
- Lab 4a Transient AnalysisDokument19 SeitenLab 4a Transient AnalysisHanafi Jutawan Kayu ApiNoch keine Bewertungen
- Experiment #1 - : By: Kumod Kumar Gupta (B09064) Kuldeep Purohit (Group Mate)Dokument8 SeitenExperiment #1 - : By: Kumod Kumar Gupta (B09064) Kuldeep Purohit (Group Mate)Lalit KumarNoch keine Bewertungen
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Von EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Bewertung: 2.5 von 5 Sternen2.5/5 (3)
- Project Report Designing Position Control System: Abu Dhabi UniversityDokument13 SeitenProject Report Designing Position Control System: Abu Dhabi UniversityMohammed ShifulNoch keine Bewertungen
- Analog and Digital Electronics Lab Manual (17CSL37) : Department of Computer Science and EngineeringDokument61 SeitenAnalog and Digital Electronics Lab Manual (17CSL37) : Department of Computer Science and Engineeringvadla77Noch keine Bewertungen
- ECE445 ProjectsDokument1 SeiteECE445 ProjectsAli Reza GalibNoch keine Bewertungen
- Lab #2: PI Controller Design and Second Order SystemsDokument4 SeitenLab #2: PI Controller Design and Second Order SystemssamielmadssiaNoch keine Bewertungen
- AbmDokument18 SeitenAbmchmscemNoch keine Bewertungen
- 18csl37-Ade Lab ManualDokument41 Seiten18csl37-Ade Lab ManualEragon ShadeSlayerNoch keine Bewertungen
- Lab 9Dokument13 SeitenLab 9Abu BakarNoch keine Bewertungen
- Experiment 11Dokument8 SeitenExperiment 11Mihai BogdanNoch keine Bewertungen
- 5807 Simulink TutorialDokument31 Seiten5807 Simulink TutorialSureshNoch keine Bewertungen
- Simlab 2Dokument85 SeitenSimlab 2Wilson BotchaNoch keine Bewertungen
- Digital Power-Conversion For The Analog EngineerDokument12 SeitenDigital Power-Conversion For The Analog EngineerfjwoemcuNoch keine Bewertungen
- Lecture 24 Computer Modeling and Simulation of PWM Converter CircuitsDokument6 SeitenLecture 24 Computer Modeling and Simulation of PWM Converter Circuitslenovo1986Noch keine Bewertungen
- DC-DC Voltage ConverterDokument14 SeitenDC-DC Voltage ConverterasifNoch keine Bewertungen
- K 6Dokument3 SeitenK 6kashishlalaNoch keine Bewertungen
- Cs Lab ManualDokument104 SeitenCs Lab ManualSyed Salman AhmadNoch keine Bewertungen
- EE215 Lab4Dokument7 SeitenEE215 Lab4Lynn FranklinNoch keine Bewertungen
- LaboratoryManualForOperationalAmplifiersAndLinearICs 3EDokument130 SeitenLaboratoryManualForOperationalAmplifiersAndLinearICs 3EMVRajeshMaliyeckalNoch keine Bewertungen
- Sim Exp NowDokument16 SeitenSim Exp NowDeepak DasNoch keine Bewertungen
- Openloop Motor ModelingDokument16 SeitenOpenloop Motor ModelingUmair RazaNoch keine Bewertungen
- EX-602 Control SystemDokument27 SeitenEX-602 Control SystemdeepaknayanNoch keine Bewertungen
- Practical Feedback Loop Design Considerations For Switched Mode Power SuppliesDokument14 SeitenPractical Feedback Loop Design Considerations For Switched Mode Power SuppliesDiego PhillipeNoch keine Bewertungen
- SRV02 Exp2 Speed ControlDokument11 SeitenSRV02 Exp2 Speed Controlsh1999Noch keine Bewertungen
- Buck Boost ConverterDokument32 SeitenBuck Boost ConverterJanmejay MohapatraNoch keine Bewertungen
- EE215 Lab 4Dokument6 SeitenEE215 Lab 4vhiep195Noch keine Bewertungen
- Winter 2001: Measuring Loop Gain and Phase MarginDokument22 SeitenWinter 2001: Measuring Loop Gain and Phase MarginFernando Sánchez HernándezNoch keine Bewertungen
- Design and Implementation of An Observer Controller For A Buck ConverterDokument11 SeitenDesign and Implementation of An Observer Controller For A Buck ConverterLee DonghyeeNoch keine Bewertungen
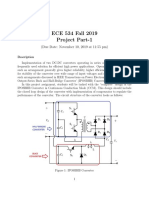
- ECE 534 Project 1 F19Dokument6 SeitenECE 534 Project 1 F19JAY CHHEDANoch keine Bewertungen
- DC Motor Speed ControlDokument5 SeitenDC Motor Speed ControlAnita WulansariNoch keine Bewertungen
- Aditi Edc FileDokument54 SeitenAditi Edc Filedamanpreetk.ee.20Noch keine Bewertungen
- Ejercicios Sensores en Tecnologías IntegradasDokument6 SeitenEjercicios Sensores en Tecnologías IntegradasMario Palmero DelgadoNoch keine Bewertungen
- CTRL Sys Lab ManualDokument46 SeitenCTRL Sys Lab Manualabixek100% (2)
- Practica RLC, Control 2Dokument19 SeitenPractica RLC, Control 2gabriel munguiaNoch keine Bewertungen
- Simulation Lab - Student ManualDokument62 SeitenSimulation Lab - Student Manualsubbu100% (1)
- LaboratoryManualForOperationalAmplifiersAndLinearICs 3E PDFDokument130 SeitenLaboratoryManualForOperationalAmplifiersAndLinearICs 3E PDFRajalingam BossNoch keine Bewertungen
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorVon EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorNoch keine Bewertungen
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsVon EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsNoch keine Bewertungen
- Assignment For EconomicsDokument5 SeitenAssignment For EconomicstarekNoch keine Bewertungen
- 0.56" Milky Anode RedDokument2 Seiten0.56" Milky Anode RedPutinun TachavatapornNoch keine Bewertungen
- Electronics Projects Circuits Book PDFDokument136 SeitenElectronics Projects Circuits Book PDFMilos Mijatovic100% (1)
- User's Guide: Downloaded From Manuals Search EngineDokument372 SeitenUser's Guide: Downloaded From Manuals Search EnginecesNoch keine Bewertungen
- Manual SP Racing F3 Deluxe OSDDokument2 SeitenManual SP Racing F3 Deluxe OSDibyselfNoch keine Bewertungen
- SY1 s17 s18 v12.01 DFDokument50 SeitenSY1 s17 s18 v12.01 DFKhalid Khalifa AtyaNoch keine Bewertungen
- Waja Chemistry Chapter 2: Structure of The AtomDokument10 SeitenWaja Chemistry Chapter 2: Structure of The AtomChewfun KhooNoch keine Bewertungen
- U3 l1 Transistor at Low FrequenciesDokument8 SeitenU3 l1 Transistor at Low FrequenciesAhmad N Effendi KälteNoch keine Bewertungen
- Chemistry WorksheetDokument5 SeitenChemistry WorksheetGiezel MadurarNoch keine Bewertungen
- Radioactive Sources Used: Cesium-137Dokument22 SeitenRadioactive Sources Used: Cesium-137ਸੁਖਪ੍ਰੀਤ ਸਿੰਘNoch keine Bewertungen
- Chemistry Notes Puspanjali PDFDokument85 SeitenChemistry Notes Puspanjali PDFDURGA PRASADNoch keine Bewertungen
- Physics ProjectDokument16 SeitenPhysics ProjectNAYAN DARYANINoch keine Bewertungen
- Sri Vasavi Engineering College: 132/33 KV Substation YernagudemDokument34 SeitenSri Vasavi Engineering College: 132/33 KV Substation Yernagudemsathya naiduNoch keine Bewertungen
- J1 RF in J2 RF Out D/C: XXXX S/N:XXX P/N: QP-AMLNA-0040-01Dokument1 SeiteJ1 RF in J2 RF Out D/C: XXXX S/N:XXX P/N: QP-AMLNA-0040-01Tribu Vaquero JimenezNoch keine Bewertungen
- SAR-Principles and ApplicationsDokument62 SeitenSAR-Principles and ApplicationsMarusan PetpookaewNoch keine Bewertungen
- Sylla PDFDokument50 SeitenSylla PDFGiju PaulNoch keine Bewertungen
- Prepking NQ0-231 Exam QuestionsDokument11 SeitenPrepking NQ0-231 Exam QuestionsHunter5445Noch keine Bewertungen
- ZW37 Heag 33 KV DrawingDokument8 SeitenZW37 Heag 33 KV Drawingabu sayedNoch keine Bewertungen
- Automatic Gun Targeting SystemDokument19 SeitenAutomatic Gun Targeting SystemManam Nobal100% (1)
- Hollow and Solid PlugDokument2 SeitenHollow and Solid PlugSandra DevannyNoch keine Bewertungen
- ch-12 pt-1 (Final)Dokument39 Seitench-12 pt-1 (Final)Muhammad TahaNoch keine Bewertungen
- CG Labs Project Final v1Dokument38 SeitenCG Labs Project Final v1Muzammil Basha100% (4)
- Maha Automation BrochureDokument12 SeitenMaha Automation BrochureMahadevappagowdaNoch keine Bewertungen
- Using The UPLOAD Program To Update CADSTAR DOS Files To CADSTAR Windows FilesDokument15 SeitenUsing The UPLOAD Program To Update CADSTAR DOS Files To CADSTAR Windows FilesJames Head50% (2)
- UG-014 KINOVA Gen3 Ultra Lightweight Robot User Guide en R02Dokument146 SeitenUG-014 KINOVA Gen3 Ultra Lightweight Robot User Guide en R02laplacesNoch keine Bewertungen
- Sequence Control - LC64Dokument34 SeitenSequence Control - LC64said_rahmansyah4750Noch keine Bewertungen
- Doosan Operation Manual PJM05Dokument3 SeitenDoosan Operation Manual PJM05Nim100% (1)
- Hydrovision Q-Eye Radar MT Radar DopplerDokument3 SeitenHydrovision Q-Eye Radar MT Radar DopplerJamjamNoch keine Bewertungen
- Somi Khan: Personal ObjectiveDokument2 SeitenSomi Khan: Personal ObjectivesomiNoch keine Bewertungen
- CL-7 Multi-Phase Control Reference: SeriesDokument2 SeitenCL-7 Multi-Phase Control Reference: SeriesJoseph TingNoch keine Bewertungen