Das könnte Ihnen auch gefallen
- Appendix-A EPM-SPD-PC-P-007 QC Dossier Index PDFDokument14 SeitenAppendix-A EPM-SPD-PC-P-007 QC Dossier Index PDFStudent Foreign100% (1)
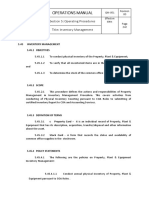
- 5.45 Inventory Management ProcedureDokument4 Seiten5.45 Inventory Management ProcedureRhozeiah LeiahNoch keine Bewertungen
- SA JER PI 801 GCCC 59 0035 Custody Metering System Rev.03Dokument17 SeitenSA JER PI 801 GCCC 59 0035 Custody Metering System Rev.03sivin001100% (2)
- Vibration Fatigue Analysis in MSC.NASTRANDokument23 SeitenVibration Fatigue Analysis in MSC.NASTRANawaishahmadNoch keine Bewertungen
- Spectral method for fatigue damage estimation with non-zero mean stressVon EverandSpectral method for fatigue damage estimation with non-zero mean stressNoch keine Bewertungen
- RINA Rules For The Classification 2015 Part B CH 5 To 8Dokument190 SeitenRINA Rules For The Classification 2015 Part B CH 5 To 8Jorge Isaac Mendoza MarchanNoch keine Bewertungen
- Weld Capacity CalculationDokument6 SeitenWeld Capacity CalculationjaineranaNoch keine Bewertungen
- Tension Compression and ShearDokument27 SeitenTension Compression and ShearRizal Muhammad FaradayNoch keine Bewertungen
- TECUMSEH Model Number CodesDokument6 SeitenTECUMSEH Model Number Codesd3xter0% (1)
- Shortwave DiathermyDokument5 SeitenShortwave DiathermydiskraNoch keine Bewertungen
- Method of Statement - Transformer Maintenance - ScannedDokument48 SeitenMethod of Statement - Transformer Maintenance - ScannedStudent ForeignNoch keine Bewertungen
- Fluor. 000.215.1233. Vibrating Machinery Foundations On Soil. 2005Dokument74 SeitenFluor. 000.215.1233. Vibrating Machinery Foundations On Soil. 2005NicolasNoch keine Bewertungen
- Notes About Vibration Control AnalysisDokument126 SeitenNotes About Vibration Control AnalysisFaizan MirNoch keine Bewertungen
- CFX-CHX-I-O Rev K - 100161845 - 2000001375 (Vent Cat.)Dokument84 SeitenCFX-CHX-I-O Rev K - 100161845 - 2000001375 (Vent Cat.)cristian24_nn0% (1)
- Specific Criteria Mechanical Testing 4 IANZDokument29 SeitenSpecific Criteria Mechanical Testing 4 IANZronargot100% (2)
- AWWA Tapping SleevesDokument21 SeitenAWWA Tapping SleevesdanilobossuNoch keine Bewertungen
- Failure TheoryDokument11 SeitenFailure TheoryGaurav MallaNoch keine Bewertungen
- SASSCO Intermediate Check InstructionDokument4 SeitenSASSCO Intermediate Check InstructionStudent ForeignNoch keine Bewertungen
- Renault Magnum 400 - 440 - 480 Service ManualDokument251 SeitenRenault Magnum 400 - 440 - 480 Service ManualMihai CostasNoch keine Bewertungen
- Lecture 18 Mechanical VibrationsDokument25 SeitenLecture 18 Mechanical VibrationsZoya QaziNoch keine Bewertungen
- Lecture10 - HMO (VELOCITY & ACCELERATION ANALYSIS USING COMPLEX NUMBER - CLASSWORK#02 - PART # 01)Dokument2 SeitenLecture10 - HMO (VELOCITY & ACCELERATION ANALYSIS USING COMPLEX NUMBER - CLASSWORK#02 - PART # 01)BDHNoch keine Bewertungen
- Outline: - Section 1.1: - Section 1.2Dokument19 SeitenOutline: - Section 1.1: - Section 1.2SalemNoch keine Bewertungen
- A Method For Extrapolating Haversine Shock Test LevelsDokument19 SeitenA Method For Extrapolating Haversine Shock Test LevelsSahaj GuptaNoch keine Bewertungen
- Last Lecture Example: - Section 2.1: - Section 2.2: - Section 2.3: - Section 2.4Dokument9 SeitenLast Lecture Example: - Section 2.1: - Section 2.2: - Section 2.3: - Section 2.4SalemNoch keine Bewertungen
- Fast Multiple Optimizations Of2 Quadratic Dose Objective Functions in IMRTDokument12 SeitenFast Multiple Optimizations Of2 Quadratic Dose Objective Functions in IMRTMauricio Moyano CastilloNoch keine Bewertungen
- Lec 5.1+5.2Dokument5 SeitenLec 5.1+5.2Samawat AhsanNoch keine Bewertungen
- Free Stress Strain Withers2007Dokument14 SeitenFree Stress Strain Withers2007Phạm Đình NguyệnNoch keine Bewertungen
- Journal Homepage: - : IntroductionDokument5 SeitenJournal Homepage: - : IntroductionIJAR JOURNALNoch keine Bewertungen
- Mechanical Vibrations: AgendaDokument19 SeitenMechanical Vibrations: AgendaSalemNoch keine Bewertungen
- 477 COMPRESSION TEST Mayıs 2021Dokument25 Seiten477 COMPRESSION TEST Mayıs 2021Ahmed KhasawnehNoch keine Bewertungen
- 1233-Vibrating Machinery FDN On SoilDokument75 Seiten1233-Vibrating Machinery FDN On SoilkinzienikolNoch keine Bewertungen
- Jaw Reflexes Evoked by Mechanical Stimulation of Teeth in HumansDokument8 SeitenJaw Reflexes Evoked by Mechanical Stimulation of Teeth in HumansJavier Farias VeraNoch keine Bewertungen
- Adaptationof Turbulance Modelstoa Navier Stokes SolverDokument171 SeitenAdaptationof Turbulance Modelstoa Navier Stokes SolverIman SaberiNoch keine Bewertungen
- PU00916EN Rev. A PicoWay - Resolve Fusion 532 HP Sell Sheet-LRDokument2 SeitenPU00916EN Rev. A PicoWay - Resolve Fusion 532 HP Sell Sheet-LRhadeer mahmoudNoch keine Bewertungen
- Journal of Petroleum Science and Engineering: Amin Mehrabian, Younane N. AbousleimanDokument9 SeitenJournal of Petroleum Science and Engineering: Amin Mehrabian, Younane N. AbousleimanMrXNoch keine Bewertungen
- Health Risk Evaluation of Whole-Body Vibration by ISO 2631-5 and ISO 2631-1 For Operators of Algricultural Tractor and Recreational VehicleDokument7 SeitenHealth Risk Evaluation of Whole-Body Vibration by ISO 2631-5 and ISO 2631-1 For Operators of Algricultural Tractor and Recreational Vehiclesam_aresNoch keine Bewertungen
- E 606 - 92 R98 RtywngDokument15 SeitenE 606 - 92 R98 RtywngAnthony GómezNoch keine Bewertungen
- Lost Circulation Materials Capability of Sealing Wide Fractures 2014Dokument13 SeitenLost Circulation Materials Capability of Sealing Wide Fractures 2014Fitria Saifullah ElyNoch keine Bewertungen
- Isolating Spectral Cues in Amplitude and Quasi Frequency Modul 2017 HearingDokument5 SeitenIsolating Spectral Cues in Amplitude and Quasi Frequency Modul 2017 HearingJuan Sebas VizueteNoch keine Bewertungen
- Abstract - Lieuwe VD MeerDokument1 SeiteAbstract - Lieuwe VD MeerFederico BabichNoch keine Bewertungen
- MarianandGiaralis SSS Revisedpaper ACCEPTEDDokument24 SeitenMarianandGiaralis SSS Revisedpaper ACCEPTEDrfahri690Noch keine Bewertungen
- Mobility of Planar Mechanisms LectureDokument17 SeitenMobility of Planar Mechanisms Lectureazizaldebasi1Noch keine Bewertungen
- Provided by Texas A& M RepositoryDokument172 SeitenProvided by Texas A& M RepositorySankhajit SahaNoch keine Bewertungen
- (2019) Fatigue and Recovery Measured With Dynamic Properties Versus Isometric Force - Effects of Exercise IntensityDokument19 Seiten(2019) Fatigue and Recovery Measured With Dynamic Properties Versus Isometric Force - Effects of Exercise IntensityDaniel Romero GarcíaNoch keine Bewertungen
- Definitions - Strain Life Analysis: Nominal StressDokument6 SeitenDefinitions - Strain Life Analysis: Nominal StressgeppolaNoch keine Bewertungen
- Evaluation of Reproductibility and Detection Limit of Caso:Dy Radiation DetectorsDokument6 SeitenEvaluation of Reproductibility and Detection Limit of Caso:Dy Radiation DetectorsMuhammad AgungNoch keine Bewertungen
- 04 - Linking Multiple Relaxation - JASADokument8 Seiten04 - Linking Multiple Relaxation - JASANilson EvilásioNoch keine Bewertungen
- Reconsolidation and Extinction of Conditioned Fear: Inhibition and PotentiationDokument6 SeitenReconsolidation and Extinction of Conditioned Fear: Inhibition and PotentiationCoqui CastagnaroNoch keine Bewertungen
- Predicting Efficacy of Fractional Carbon Dioxide LaserDokument1 SeitePredicting Efficacy of Fractional Carbon Dioxide LaserАркадий ЖивицаNoch keine Bewertungen
- Aaem Practice Topic in Electrodiagnostic MedicineDokument5 SeitenAaem Practice Topic in Electrodiagnostic MedicineLulu LuwiiNoch keine Bewertungen
- 2015 Generalized TrescaDokument5 Seiten2015 Generalized Trescakristian.krabbenhoft1463Noch keine Bewertungen
- Pseudoreplication in Playback Experiments, Revisited A Decade LaterDokument5 SeitenPseudoreplication in Playback Experiments, Revisited A Decade LaterEmma stella Ruiz RubianoNoch keine Bewertungen
- 1994 Hydrodynamic Heave Damping Estimation and Scaling For Tension Leg PlatformsDokument7 Seiten1994 Hydrodynamic Heave Damping Estimation and Scaling For Tension Leg Platformsshubham khodiyarNoch keine Bewertungen
- Efficient Gamma Index Calculation Using Fast Euclidean Distance TransformDokument12 SeitenEfficient Gamma Index Calculation Using Fast Euclidean Distance TransformJere OlivieriNoch keine Bewertungen
- Dispersing nanoparticles in liquidsDokument11 SeitenDispersing nanoparticles in liquidsAtulNoch keine Bewertungen
- Vorlander Et Al. - 2004 - Case Studies in Measurement of Random Incidence SCDokument10 SeitenVorlander Et Al. - 2004 - Case Studies in Measurement of Random Incidence SCTrojanNoch keine Bewertungen
- Amplutido InterDokument18 SeitenAmplutido InterVian OchaNoch keine Bewertungen
- Discussions and ClosuresDokument7 SeitenDiscussions and ClosuresShashi KumarNoch keine Bewertungen
- Refinedhmabeamfatiguetestingconditions AstmDokument27 SeitenRefinedhmabeamfatiguetestingconditions AstmSK SOHELISLAMNoch keine Bewertungen
- Dielectric Properties of Natural Ester Oils Used For Transformer Application Under Temperature VariationDokument5 SeitenDielectric Properties of Natural Ester Oils Used For Transformer Application Under Temperature VariationDimas VidiandaruNoch keine Bewertungen
- Unit 1 IntroductionDokument38 SeitenUnit 1 Introductionsubha_aeroNoch keine Bewertungen
- RS 011 PDFDokument6 SeitenRS 011 PDFBALRAJNoch keine Bewertungen
- troyer (2000)Dokument10 Seitentroyer (2000)capereh11Noch keine Bewertungen
- E1426-14Dokument6 SeitenE1426-14benjaminverduzco4Noch keine Bewertungen
- Lecture 6 Fatigue FailureDokument22 SeitenLecture 6 Fatigue FailureZulfadzli RidzuanNoch keine Bewertungen
- Modelling Motion Sickness and Subjective Vertical Mismatch Detailed For Vertical MotionsDokument6 SeitenModelling Motion Sickness and Subjective Vertical Mismatch Detailed For Vertical MotionsVu MinhNoch keine Bewertungen
- BF 03197375Dokument3 SeitenBF 03197375Krisha Mae Arbo EspinasNoch keine Bewertungen
- A Microgyroscope With Piezoresistance For Both HigDokument173 SeitenA Microgyroscope With Piezoresistance For Both HigTony K PaulNoch keine Bewertungen
- Lecture 2Dokument6 SeitenLecture 2ShehataRaheem DrEngNoch keine Bewertungen
- Waheed Mustafa Mohammed PDFDokument17 SeitenWaheed Mustafa Mohammed PDFWaheed H HunterNoch keine Bewertungen
- Helms RPEVolumeAutoregulation 2017Dokument30 SeitenHelms RPEVolumeAutoregulation 2017leal thiagoNoch keine Bewertungen
- Lec 5Dokument5 SeitenLec 5zainab.mahdi22011Noch keine Bewertungen
- Business Management System - Competence & Awareness: 1 PurposeDokument3 SeitenBusiness Management System - Competence & Awareness: 1 PurposeStudent ForeignNoch keine Bewertungen
- How To Calculate Conduit FillDokument4 SeitenHow To Calculate Conduit FillAliNoch keine Bewertungen
- bms.0610 r0 Risk and Opportunities PDFDokument5 Seitenbms.0610 r0 Risk and Opportunities PDFshadyalakhrasNoch keine Bewertungen
- Ge Druck Dry TC 165 Dry Block Temperature Calibrator DatasheetDokument8 SeitenGe Druck Dry TC 165 Dry Block Temperature Calibrator DatasheetStudent ForeignNoch keine Bewertungen
- 04-52-05-1 MU - Precia Molen - ManualzzDokument32 Seiten04-52-05-1 MU - Precia Molen - ManualzzStudent ForeignNoch keine Bewertungen
- Business Management System - Objectives and Programs: 1 PurposeDokument2 SeitenBusiness Management System - Objectives and Programs: 1 PurposeStudent ForeignNoch keine Bewertungen
- Business Management System - BMS ManualDokument11 SeitenBusiness Management System - BMS ManualStudent ForeignNoch keine Bewertungen
- bms.0630 r0 Management of Change PDFDokument3 Seitenbms.0630 r0 Management of Change PDFLedo HoussienNoch keine Bewertungen
- 5000 Series Indicators Instruction Manual: T51P IndicatorDokument64 Seiten5000 Series Indicators Instruction Manual: T51P IndicatorStudent ForeignNoch keine Bewertungen
- Vpflowmate User Manual: For Vpflowmate Probe, and Vpflowmate In-Line (With M12 8-Pole Connector)Dokument40 SeitenVpflowmate User Manual: For Vpflowmate Probe, and Vpflowmate In-Line (With M12 8-Pole Connector)Student ForeignNoch keine Bewertungen
- Metrologia 2011 PRT in Dry-Block Calibration ProcessDokument5 SeitenMetrologia 2011 PRT in Dry-Block Calibration Processfernando diazNoch keine Bewertungen
- Using a Mini Triple Point of Water System to Improve Temperature Calibration ReliabilityDokument8 SeitenUsing a Mini Triple Point of Water System to Improve Temperature Calibration ReliabilityStudent ForeignNoch keine Bewertungen
- Install TTDM-128 PDFDokument6 SeitenInstall TTDM-128 PDFStudent ForeignNoch keine Bewertungen
- Weighbridge indicator for explosive atmospheresDokument2 SeitenWeighbridge indicator for explosive atmospheresStudent ForeignNoch keine Bewertungen
- TUV Austria ProfileDokument56 SeitenTUV Austria ProfileStudent ForeignNoch keine Bewertungen
- OHAUS Balance PDFDokument4 SeitenOHAUS Balance PDFninaNoch keine Bewertungen
- Ventrack Control Valve TesterDokument4 SeitenVentrack Control Valve TesterStudent ForeignNoch keine Bewertungen
- COVID 19 Training Course For Doctors PDFDokument2 SeitenCOVID 19 Training Course For Doctors PDFStudent ForeignNoch keine Bewertungen
- Non-Budgeted Expenditure Request FormDokument1 SeiteNon-Budgeted Expenditure Request FormStudent ForeignNoch keine Bewertungen
- Field Communicator (Emerson 375)Dokument1 SeiteField Communicator (Emerson 375)Student ForeignNoch keine Bewertungen
- Icp SS 128Dokument2 SeitenIcp SS 128Student ForeignNoch keine Bewertungen
- Calibration Datasheet Fro Multi Product Calibrator 3010 TransmilleDokument4 SeitenCalibration Datasheet Fro Multi Product Calibrator 3010 TransmilleStudent ForeignNoch keine Bewertungen
- SASSCO Intermediate Check Instruction SheetDokument2 SeitenSASSCO Intermediate Check Instruction SheetStudent ForeignNoch keine Bewertungen
- SASSCO Intermediate Check Instruction SheetDokument2 SeitenSASSCO Intermediate Check Instruction SheetStudent ForeignNoch keine Bewertungen
- SASSCO Intermediate Check Instruction SheetDokument2 SeitenSASSCO Intermediate Check Instruction SheetStudent ForeignNoch keine Bewertungen
- Compendium of Design Office Problems-Volume IIIDokument10 SeitenCompendium of Design Office Problems-Volume IIIsaber javidNoch keine Bewertungen
- Section - Iv: Damodar Valley CorporationDokument3 SeitenSection - Iv: Damodar Valley CorporationabhishekNoch keine Bewertungen
- 40-272 - Basic Vicat/HDT (Up To 3 or Up To 6 Measuring Stations)Dokument3 Seiten40-272 - Basic Vicat/HDT (Up To 3 or Up To 6 Measuring Stations)MiguelNoch keine Bewertungen
- Guideline On Submission of Amendment and Record Piling Plans PDFDokument9 SeitenGuideline On Submission of Amendment and Record Piling Plans PDFBlu SmileyNoch keine Bewertungen
- Fluid Tests22Dokument28 SeitenFluid Tests22son gokuNoch keine Bewertungen
- Nine9 Indexable Milling CutterDokument16 SeitenNine9 Indexable Milling Cutterعبدالله محمدNoch keine Bewertungen
- Allison MT (B) 640, 643, 650, 653 Series On-Highway Transmissions Parts CatalogDokument6 SeitenAllison MT (B) 640, 643, 650, 653 Series On-Highway Transmissions Parts CatalogMarcos LunaNoch keine Bewertungen
- Fluid Mechanics-Fluid Dynamics PDFDokument3 SeitenFluid Mechanics-Fluid Dynamics PDFCristian OmacNoch keine Bewertungen
- Examples: 238 17 PsychrometricsDokument12 SeitenExamples: 238 17 PsychrometricsJunior Ferrel AlvarezNoch keine Bewertungen
- Thongwik 2008Dokument5 SeitenThongwik 2008João Paulo VissottoNoch keine Bewertungen
- 2.hisense VRF-Key Features - Installation ReferencesDokument84 Seiten2.hisense VRF-Key Features - Installation ReferencesridNoch keine Bewertungen
- Unit Ops2 Momentum TRNSFRDokument5 SeitenUnit Ops2 Momentum TRNSFRRoselyn BunquinNoch keine Bewertungen
- Fluid Mechanics FundamentalsDokument142 SeitenFluid Mechanics FundamentalsAnonymous yorzHjDBdNoch keine Bewertungen
- Revision - Summary - 7T04 MP 00 TS 004 - Rev10Dokument10 SeitenRevision - Summary - 7T04 MP 00 TS 004 - Rev10Cristi DemNoch keine Bewertungen
- Cartec Insulation Kit Catalogue1Dokument12 SeitenCartec Insulation Kit Catalogue1SalmanNoch keine Bewertungen
- Lifting Bails PDFDokument1 SeiteLifting Bails PDFJoaoNoch keine Bewertungen
- Advanced Quantum Mechanics Notes on Symmetry Groups and DegeneracyDokument12 SeitenAdvanced Quantum Mechanics Notes on Symmetry Groups and Degeneracysayandatta1Noch keine Bewertungen
- FT50,60FVMDokument56 SeitenFT50,60FVMvtin tinNoch keine Bewertungen
- Paper On GravitationDokument8 SeitenPaper On GravitationShama tanveerNoch keine Bewertungen
- Modeling and Simulation of Four-Bar Planar Mechanisms Using AdamsDokument7 SeitenModeling and Simulation of Four-Bar Planar Mechanisms Using AdamsIAEME PublicationNoch keine Bewertungen
- 6 TransmissionDokument38 Seiten6 TransmissionKamal Jit DhimanNoch keine Bewertungen
- Artigo - Professor EduardoDokument10 SeitenArtigo - Professor EduardoAndré Guimarães LóssNoch keine Bewertungen