Das könnte Ihnen auch gefallen
- Savannah and Grassland Monitors: From the Experts at Advanced Vivarium SystemsVon EverandSavannah and Grassland Monitors: From the Experts at Advanced Vivarium SystemsNoch keine Bewertungen
- Aspects of Reproduction and Development in the Prairie Vole (Microtus ochrogaster)Von EverandAspects of Reproduction and Development in the Prairie Vole (Microtus ochrogaster)Noch keine Bewertungen
- Smithsonian Tropical Research Institute, Balboa, Canal Z.oneDokument13 SeitenSmithsonian Tropical Research Institute, Balboa, Canal Z.oneFiyya NidaNoch keine Bewertungen
- How Does The Ant Know The Way Home Without Guiding Clues On The Desert PlainDokument5 SeitenHow Does The Ant Know The Way Home Without Guiding Clues On The Desert PlainDiane102Noch keine Bewertungen
- Swarm Inteligence Seminar ReportDokument20 SeitenSwarm Inteligence Seminar ReportAbhilash Nayak100% (3)
- How Desert Ants Find Their Way Home Without Visual CuesDokument9 SeitenHow Desert Ants Find Their Way Home Without Visual CuesFlywave TranceNoch keine Bewertungen
- Way-Marking Behaviour - An Aid To Spatial Navigation in The Wood Mouse (Apodemus Sylvaticus)Dokument9 SeitenWay-Marking Behaviour - An Aid To Spatial Navigation in The Wood Mouse (Apodemus Sylvaticus)FernandoNoch keine Bewertungen
- Laboratory Activity No.3Dokument1 SeiteLaboratory Activity No.3Elaine MoralesNoch keine Bewertungen
- Large-Scale Navigational Map in A MammalDokument7 SeitenLarge-Scale Navigational Map in A MammalchysaNoch keine Bewertungen
- Springer Behavioral Ecology and SociobiologyDokument12 SeitenSpringer Behavioral Ecology and SociobiologyNam LeNoch keine Bewertungen
- Homing and MigrationDokument31 SeitenHoming and MigrationdikhsyaguragainNoch keine Bewertungen
- Content ServerDokument5 SeitenContent ServerCarolina ValenciaNoch keine Bewertungen
- Ant Colony OptimizationDokument12 SeitenAnt Colony OptimizationMauro Muñoz MedinaNoch keine Bewertungen
- Habitat Discrimination by Gravid Anopheles Gambiae Sensu Lato - A Push-Pull SystemDokument15 SeitenHabitat Discrimination by Gravid Anopheles Gambiae Sensu Lato - A Push-Pull SystemIwan Suryadi MahmudNoch keine Bewertungen
- Are Ants (Hymenoptera, Formicidae) Capable of Self Recognition PDFDokument12 SeitenAre Ants (Hymenoptera, Formicidae) Capable of Self Recognition PDFcthioeuhieuNoch keine Bewertungen
- Mole Rat PDFDokument8 SeitenMole Rat PDFWK WKNoch keine Bewertungen
- Reid Et Al PNAS-2012Dokument5 SeitenReid Et Al PNAS-2012domraorNoch keine Bewertungen
- Redundant Food Searches by Capuchin Monkeys (Cebus Apella) : A Failure of Metacognition?Dokument8 SeitenRedundant Food Searches by Capuchin Monkeys (Cebus Apella) : A Failure of Metacognition?Alex DanNoch keine Bewertungen
- Visual and Response-Based Navigation in The Tortoise (Geochelone Carbonaria)Dokument9 SeitenVisual and Response-Based Navigation in The Tortoise (Geochelone Carbonaria)laspiur22blues7327Noch keine Bewertungen
- Do Hairworms (Nematomorpha) Manipulate The Water Seeking Behaviour of Their Terrestrial Hosts?Dokument6 SeitenDo Hairworms (Nematomorpha) Manipulate The Water Seeking Behaviour of Their Terrestrial Hosts?ohailmhicNoch keine Bewertungen
- Ecological Society of AmericaDokument10 SeitenEcological Society of AmericaDaniel VillalobosNoch keine Bewertungen
- Wade C. Sherbrooke.2017.Vigilancia de Nidos Antidepredadores Por Lagartos Hembra (Phrynosoma) Cuidado Parental de IguaniaDokument8 SeitenWade C. Sherbrooke.2017.Vigilancia de Nidos Antidepredadores Por Lagartos Hembra (Phrynosoma) Cuidado Parental de IguaniaMarcos Valentin Laurean HernándezNoch keine Bewertungen
- This Is The Original Experiment Run by BLG144 Students in 2017. Foraging Behaviour of Fruit Flies (Drosophila Melanogaster)Dokument8 SeitenThis Is The Original Experiment Run by BLG144 Students in 2017. Foraging Behaviour of Fruit Flies (Drosophila Melanogaster)Dineth GunasekeraNoch keine Bewertungen
- Biofluorescence in Nocturnal Crepuscular MammalsDokument6 SeitenBiofluorescence in Nocturnal Crepuscular MammalsTanyut HuidromNoch keine Bewertungen
- Swarm Intelligence: Jawaharlal Nehru Technological University, ANANTAPUR-515002Dokument12 SeitenSwarm Intelligence: Jawaharlal Nehru Technological University, ANANTAPUR-515002lakshmanprathapNoch keine Bewertungen
- About PigonsDokument8 SeitenAbout PigonsJatin ChaudharyNoch keine Bewertungen
- Dance - Lars Chittka PDFDokument3 SeitenDance - Lars Chittka PDFprabhudevmvNoch keine Bewertungen
- Yap Et Al SpidersDokument17 SeitenYap Et Al SpidersLaís da GlóriaNoch keine Bewertungen
- ATQ (Bio Lab 12) E7Dokument3 SeitenATQ (Bio Lab 12) E7fizzypurplesodaNoch keine Bewertungen
- 33 - Art Abo Ladbu InteDokument10 Seiten33 - Art Abo Ladbu InteLibertad BaumNoch keine Bewertungen
- 2019 Tgi of Food Pref in Ba Gowri Et AlDokument14 Seiten2019 Tgi of Food Pref in Ba Gowri Et AllguyonvarchNoch keine Bewertungen
- Ants Learn Geometry and Features. Wystrach & Beugnon, 2009Dokument6 SeitenAnts Learn Geometry and Features. Wystrach & Beugnon, 2009nytoranNoch keine Bewertungen
- Volume 42 1 97 5Dokument8 SeitenVolume 42 1 97 5AnindyaMustikaNoch keine Bewertungen
- Bird Community Report of Ecology Project 2015Dokument6 SeitenBird Community Report of Ecology Project 2015Faishal BluesNoch keine Bewertungen
- Response of Dubia Cockroach (Blaptica Dubia) To Different Neural Stimulation ConditionsDokument20 SeitenResponse of Dubia Cockroach (Blaptica Dubia) To Different Neural Stimulation ConditionsVincent GregorioNoch keine Bewertungen
- 1 s2.0 S0003347207004319 MainDokument4 Seiten1 s2.0 S0003347207004319 MainivansiiitoNoch keine Bewertungen
- Incorporating Animal Movement Into Distance SamplingDokument9 SeitenIncorporating Animal Movement Into Distance SamplingCamila PinzonNoch keine Bewertungen
- Behavioral Studies of Bats in Captivity: Methodology, Training, and Experimental DesignDokument20 SeitenBehavioral Studies of Bats in Captivity: Methodology, Training, and Experimental DesignIslam Ausraf RajibNoch keine Bewertungen
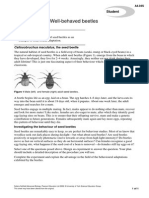
- Well Behaved BeetlesDokument1 SeiteWell Behaved BeetlesPa GesNoch keine Bewertungen
- In Chicks 1999Dokument8 SeitenIn Chicks 1999Clara Bada CoelloNoch keine Bewertungen
- Week5 (AI Inspiration)Dokument31 SeitenWeek5 (AI Inspiration)Karim Abd El-GayedNoch keine Bewertungen
- How Avian Nest Site Selection Responds To Predation Risk Testing An 'Adaptive Peak Hypothesis' - Journal of Animal Ecology - 2012Dokument12 SeitenHow Avian Nest Site Selection Responds To Predation Risk Testing An 'Adaptive Peak Hypothesis' - Journal of Animal Ecology - 2012carlos murciaNoch keine Bewertungen
- 1 Describe The Biogeographical Field Techniques As Used in Plant and Animals StudiesDokument2 Seiten1 Describe The Biogeographical Field Techniques As Used in Plant and Animals StudiesLemaragiti SapukiNoch keine Bewertungen
- Volume_38_2_117_132_Macaca_fascicularisDokument16 SeitenVolume_38_2_117_132_Macaca_fascicularisAnindyaMustikaNoch keine Bewertungen
- Cockroaches Encyc Anim Behav 2010Dokument7 SeitenCockroaches Encyc Anim Behav 2010JibrinNoch keine Bewertungen
- Molecular Genetic Analysis of Male Alternative Strategy and Reproductive Success in The Polygynous Mating BatDokument9 SeitenMolecular Genetic Analysis of Male Alternative Strategy and Reproductive Success in The Polygynous Mating BatSiti Rabiatul FajriNoch keine Bewertungen
- Dogs Magnetig Homing Elife-55080-V1Dokument19 SeitenDogs Magnetig Homing Elife-55080-V1Mikkel Boel SørensenNoch keine Bewertungen
- Muestreo Anfibios y ReptilesDokument28 SeitenMuestreo Anfibios y ReptilesHector CardenasNoch keine Bewertungen
- Giving-up densities reveal habitat preferences of robins and starlingsDokument6 SeitenGiving-up densities reveal habitat preferences of robins and starlingsayakashi hanatoNoch keine Bewertungen
- EssDokument4 SeitenEssHarith Muhammad100% (1)
- Evidence For EvolutionDokument5 SeitenEvidence For EvolutionParidhi BhandariNoch keine Bewertungen
- Zoo Biology - 2022 - CambrelenDokument7 SeitenZoo Biology - 2022 - Cambrelenmartha.brownNoch keine Bewertungen
- A Discussion About QuadratsDokument5 SeitenA Discussion About QuadratsramsaykrisinaNoch keine Bewertungen
- How Stingless Bees Use Optic Flow to Estimate Flight DistancesDokument8 SeitenHow Stingless Bees Use Optic Flow to Estimate Flight DistancesMohd Afiq AizatNoch keine Bewertungen
- Animal Behaviour: Thomas C. Jones, Tamer S. Akoury, Christopher K. Hauser, Darrell MooreDokument7 SeitenAnimal Behaviour: Thomas C. Jones, Tamer S. Akoury, Christopher K. Hauser, Darrell MooreRonie BrancoNoch keine Bewertungen
- Long-tailed Macaque Behavior StudyDokument15 SeitenLong-tailed Macaque Behavior StudyebbyNoch keine Bewertungen
- (ネコ食について) イエネコが野生小動物を絶滅の危機に追いやっているDokument9 Seiten(ネコ食について) イエネコが野生小動物を絶滅の危機に追いやっているyuuki.888pNoch keine Bewertungen
- Invertebrates Autor The Houston Museum of Natural ScienceDokument16 SeitenInvertebrates Autor The Houston Museum of Natural ScienceAzmi RahmanNoch keine Bewertungen
- Planta Hospedera PierisDokument2 SeitenPlanta Hospedera PierisfranciscoNoch keine Bewertungen
- Chapter 03 Descriptive Statistics Numerical MeasuresDokument49 SeitenChapter 03 Descriptive Statistics Numerical MeasuresHoang Ha100% (1)
- Y4 FYE CMath + AMath Notes (Condensed Version)Dokument56 SeitenY4 FYE CMath + AMath Notes (Condensed Version)Kaja RajalakshmiNoch keine Bewertungen
- Sample QuestionsDokument5 SeitenSample Questionsihab awwadNoch keine Bewertungen
- Exercise: Explore Data Using Data Visualization TechniquesDokument41 SeitenExercise: Explore Data Using Data Visualization TechniquesWiggi ArvelaNoch keine Bewertungen
- Statistics Measures ExplainedDokument61 SeitenStatistics Measures ExplainedKarl Wilson GonzalesNoch keine Bewertungen
- Measures Variability v0.2Dokument7 SeitenMeasures Variability v0.2Mansi DabhiNoch keine Bewertungen
- Mu123 Tma02Dokument5 SeitenMu123 Tma02alhullandi100% (1)
- EMBS7E - CH 03 (B)Dokument43 SeitenEMBS7E - CH 03 (B)Mikaela JeanNoch keine Bewertungen
- Tutorial QSDokument18 SeitenTutorial QSLee Seow InnNoch keine Bewertungen
- Measures of Central Tendency ExplainedDokument27 SeitenMeasures of Central Tendency ExplainedRosemarie AlcantaraNoch keine Bewertungen
- Measures of Central Tendency and Variability ExplainedDokument17 SeitenMeasures of Central Tendency and Variability Explainedvenyena ericNoch keine Bewertungen
- Unit 2 MLDokument93 SeitenUnit 2 MLSiti Hariksa AmaliaNoch keine Bewertungen
- Book Statistics For MLDokument476 SeitenBook Statistics For MLVictor JaramilloNoch keine Bewertungen
- Stat 250.3 Practice Quiz 1 AnalysisDokument4 SeitenStat 250.3 Practice Quiz 1 AnalysisTran Anh VuNoch keine Bewertungen
- Measures of Variation in DataDokument8 SeitenMeasures of Variation in DataNJeric Ligeralde AresNoch keine Bewertungen
- D. Brian's Notes 2023Dokument69 SeitenD. Brian's Notes 2023Jake TredouxNoch keine Bewertungen
- AS Exercise 2021Dokument61 SeitenAS Exercise 2021Pik ki WongNoch keine Bewertungen
- Basic Business Stats (Foster Stine Water)Dokument239 SeitenBasic Business Stats (Foster Stine Water)Brijraj PatilNoch keine Bewertungen
- Lecture 2 - Numerical Description - LN 2Dokument42 SeitenLecture 2 - Numerical Description - LN 2Freddie NsamaNoch keine Bewertungen
- Sas Teacher's GuideDokument51 SeitenSas Teacher's GuideB.S.Krishna ShettyNoch keine Bewertungen
- Parental Opinions and Attitudes About Children's Vaccination Safety in Silesian Voivodeship, PolandDokument8 SeitenParental Opinions and Attitudes About Children's Vaccination Safety in Silesian Voivodeship, PolandkrishnasreeNoch keine Bewertungen
- Econometrics Lecture - 1Dokument32 SeitenEconometrics Lecture - 1Ives LeeNoch keine Bewertungen
- Business Statistics MCQsDokument24 SeitenBusiness Statistics MCQsBebarg100% (1)
- BoxplotsDokument17 SeitenBoxplotsbok24Noch keine Bewertungen
- Chapter 9Dokument34 SeitenChapter 9api-268597715Noch keine Bewertungen
- Tutorial 2 SSF1093 Descriptive Statistics Numerical WayDokument2 SeitenTutorial 2 SSF1093 Descriptive Statistics Numerical WayJeandisle MaripaNoch keine Bewertungen
- CH 2 SolutionsManualDokument89 SeitenCH 2 SolutionsManualPaarsa Khan100% (1)
- Business StatisticsDokument173 SeitenBusiness Statisticslakshay187Noch keine Bewertungen
- Data VisualizationDokument29 SeitenData VisualizationManahil NoorNoch keine Bewertungen
- Descriptive Statistics ModifiedDokument36 SeitenDescriptive Statistics ModifiedShahriar MahirNoch keine Bewertungen