Das könnte Ihnen auch gefallen
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsVon EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsNoch keine Bewertungen
- Arduino Based Underground and Overhead Cable Fault DetectionDokument7 SeitenArduino Based Underground and Overhead Cable Fault DetectionUmair Mansoor100% (1)
- InverterDokument13 SeitenInverterejike123100% (1)
- Arduino Based Underground Cable Fault DetectionDokument2 SeitenArduino Based Underground Cable Fault Detectionashish80% (5)
- GSM Based Energy MeterDokument45 SeitenGSM Based Energy MeterANIME Fans100% (1)
- Design & Construction of A 220V Voltage StabilizerDokument49 SeitenDesign & Construction of A 220V Voltage StabilizerHassan Shahid67% (3)
- Arduino Based Underground Cable Fault Detector (Single Phase)Dokument51 SeitenArduino Based Underground Cable Fault Detector (Single Phase)Irum96% (26)
- Smart Irrigation System Using Soil Moisture Sensor: Submitted ToDokument11 SeitenSmart Irrigation System Using Soil Moisture Sensor: Submitted ToAlone Walker100% (1)
- Underground Cable Fault Detection Using ZigbeeDokument36 SeitenUnderground Cable Fault Detection Using ZigbeeRana AbrarNoch keine Bewertungen
- Project Report of ElectronicsDokument9 SeitenProject Report of Electronicsapi-307821649Noch keine Bewertungen
- Final Mini Project ReportDokument29 SeitenFinal Mini Project ReportumaNoch keine Bewertungen
- Bidirectional Visitor Counter With Energy Saving Module by Michaela KargboDokument47 SeitenBidirectional Visitor Counter With Energy Saving Module by Michaela KargboMichaela Kargbo100% (1)
- Automatic Low Power Emergency LightDokument26 SeitenAutomatic Low Power Emergency LightMansi Singh100% (1)
- Project Report On Home AutomationDokument59 SeitenProject Report On Home AutomationSaurabh Niley100% (4)
- 9th BATCHDokument51 Seiten9th BATCHSharma AnandanNoch keine Bewertungen
- Design & Construction of A 220V Voltage StabilizerDokument48 SeitenDesign & Construction of A 220V Voltage StabilizerSboNoch keine Bewertungen
- Automatic Street Light ControllerDokument42 SeitenAutomatic Street Light ControllerAvinash Ambati40% (5)
- Project Report Transmission Line Fault MonitoringDokument34 SeitenProject Report Transmission Line Fault Monitoringkra_amNoch keine Bewertungen
- Underground Cable Fault Detection Using GSMDokument50 SeitenUnderground Cable Fault Detection Using GSMSiva Raj100% (1)
- Smart Energy Meter With Theft Protection Using ArduinoDokument35 SeitenSmart Energy Meter With Theft Protection Using ArduinoJhala SainNoch keine Bewertungen
- Over Under Voltage and Over Current Protection SystemDokument8 SeitenOver Under Voltage and Over Current Protection SystemHassan AliNoch keine Bewertungen
- Clap SwitchDokument54 SeitenClap SwitchMohammed Zaheer58% (12)
- Design and Construction of A Electronics Trainer KitDokument42 SeitenDesign and Construction of A Electronics Trainer KitToheebdareNoch keine Bewertungen
- Design and Construction of An Automatic Room Light Controller With Visitor CounterDokument34 SeitenDesign and Construction of An Automatic Room Light Controller With Visitor CounterEnemona Elijah Ejima100% (1)
- Project Report PDFDokument78 SeitenProject Report PDFrijilpoothadi71% (7)
- Auto Power Supply Control From 4 Different Sources Solar, Mains, Generator & Inverter To Ensure No Break PowerDokument23 SeitenAuto Power Supply Control From 4 Different Sources Solar, Mains, Generator & Inverter To Ensure No Break PowerAnonymous QIuAGIadXm69% (13)
- Solar Power Charge ControllerDokument61 SeitenSolar Power Charge Controllerzubair100% (1)
- Underground Cable Fault DetectionDokument4 SeitenUnderground Cable Fault DetectionAnonymous HyOfbJ6100% (1)
- Shadow AlarmDokument23 SeitenShadow AlarmAlok PawarNoch keine Bewertungen
- MINI PROJECT REPORTSound Operated Switch Using 555 Timer ICDokument30 SeitenMINI PROJECT REPORTSound Operated Switch Using 555 Timer ICSagar Bhardwaj80% (35)
- Project ReportDokument23 SeitenProject ReportHarishNoch keine Bewertungen
- Stepper Motor ReportDokument13 SeitenStepper Motor ReportVolda0% (2)
- Home Automation ReportDokument52 SeitenHome Automation ReportShashank PandeyNoch keine Bewertungen
- Scrolling LED Display BoardDokument26 SeitenScrolling LED Display BoardParmar Kundan0% (1)
- Biderectional Visitor CounterDokument6 SeitenBiderectional Visitor CounterSamuel JohnNoch keine Bewertungen
- InverterDokument52 SeitenInverterD'ivy M Chico100% (3)
- GSM Based Circuit Breaker For Electric LDokument63 SeitenGSM Based Circuit Breaker For Electric LSiva KumarNoch keine Bewertungen
- Under Ground Cable Fault Detection Using IOT-1Dokument22 SeitenUnder Ground Cable Fault Detection Using IOT-1Sarath V PradheepNoch keine Bewertungen
- Speed Control of Single Phase Induction Motor" by Using Triac PDFDokument90 SeitenSpeed Control of Single Phase Induction Motor" by Using Triac PDFrijilpoothadiNoch keine Bewertungen
- Phase Sequence Detection With Three Phase Controlled SupplyDokument75 SeitenPhase Sequence Detection With Three Phase Controlled Supply18eclaris1867% (3)
- DC Motor CTRL Using Single SwitchDokument44 SeitenDC Motor CTRL Using Single SwitchAbhijeet NayakNoch keine Bewertungen
- PWM DC Motor Speed Control Using 555Dokument16 SeitenPWM DC Motor Speed Control Using 555Karthik Dm67% (3)
- Satellite Communication Lab Manual EC-7003: Department of Electronics & Communication EngineeringDokument20 SeitenSatellite Communication Lab Manual EC-7003: Department of Electronics & Communication EngineeringMayank Kumar100% (1)
- Home AutomationDokument33 SeitenHome AutomationRavi KumarNoch keine Bewertungen
- Synopsis On Underground Cable Fault DetectionDokument4 SeitenSynopsis On Underground Cable Fault DetectionROBOMAXX100% (1)
- Isitors CounterDokument37 SeitenIsitors CounterCnp1 Cnp1Noch keine Bewertungen
- Speed Control of DC Motor by 555 Timer ICDokument22 SeitenSpeed Control of DC Motor by 555 Timer ICSuvam Sinha100% (2)
- Ac To High Voltage DC Using Voltage Multiplier CircuitDokument2 SeitenAc To High Voltage DC Using Voltage Multiplier Circuitdaktarnaik95100% (1)
- Automatic Street Light Control SystemDokument10 SeitenAutomatic Street Light Control SystemMahathir AhmadNoch keine Bewertungen
- Wireless Ac Power Detector: A Minor Project ReportDokument16 SeitenWireless Ac Power Detector: A Minor Project ReportSunny SinghNoch keine Bewertungen
- Mini-Project I-Led Flasher ReportDokument8 SeitenMini-Project I-Led Flasher ReportAtiqMarwatNoch keine Bewertungen
- Construction of Automatic Water Level Controller For Both Overhead and Underground TanksDokument70 SeitenConstruction of Automatic Water Level Controller For Both Overhead and Underground Tanksmyhomenet119188125% (4)
- Balayo ResearchDokument26 SeitenBalayo Researchnyangoma vivianNoch keine Bewertungen
- Microcontroller Based Solar Tracker PDFDokument57 SeitenMicrocontroller Based Solar Tracker PDFMetinNoch keine Bewertungen
- Engineering Challenges Associated With Building Structures Erected in Waterlogged AreaDokument73 SeitenEngineering Challenges Associated With Building Structures Erected in Waterlogged AreaLasisi Kayode Hassan50% (2)
- Print 2Dokument50 SeitenPrint 2Daniel Pasy SelekaNoch keine Bewertungen
- 100 Watts Power Amplifier Design PDFDokument47 Seiten100 Watts Power Amplifier Design PDFMark Kenneth ValerioNoch keine Bewertungen
- Design and Implementation of 100 W Class AB AmplifierDokument47 SeitenDesign and Implementation of 100 W Class AB AmplifierreneSantosIVNoch keine Bewertungen
- Nyansiongo Tea Factory System ReportDokument64 SeitenNyansiongo Tea Factory System ReportOwen Clevers50% (4)
- Final Copy of Report JamesDokument47 SeitenFinal Copy of Report Jamesopio jamesNoch keine Bewertungen
- Laptop Sale Agreement ToolkitDokument2 SeitenLaptop Sale Agreement ToolkitYogesh KherdeNoch keine Bewertungen
- An Introduction To MQTT For Complete BeginnersDokument22 SeitenAn Introduction To MQTT For Complete BeginnerskarchecovNoch keine Bewertungen
- Vandana New ResumeDokument1 SeiteVandana New ResumeVandu KNoch keine Bewertungen
- Memo SlacDokument3 SeitenMemo Slacvincevillamora2k11100% (1)
- R-Net System R-Net System: Multi-Rehab Powerchair Control SystemDokument4 SeitenR-Net System R-Net System: Multi-Rehab Powerchair Control SystemMikel VillanuevaNoch keine Bewertungen
- Chapter 4 - Introduction To WindowsDokument8 SeitenChapter 4 - Introduction To WindowsKelvin mwaiNoch keine Bewertungen
- Water: Use of Decision Tables To Simulate Management in SWAT+Dokument10 SeitenWater: Use of Decision Tables To Simulate Management in SWAT+Hugo Lenin SanchezNoch keine Bewertungen
- Andhra Pradesh State Board of Technical Education and Training, AP Sbtet Diploma c16 Exam Results June 2019 FromDokument1 SeiteAndhra Pradesh State Board of Technical Education and Training, AP Sbtet Diploma c16 Exam Results June 2019 FromCharan PrasadNoch keine Bewertungen
- Siemens Sivacon S8Dokument42 SeitenSiemens Sivacon S8Mohamed NasrNoch keine Bewertungen
- TB6500 ManualDokument11 SeitenTB6500 ManualEnrique BautistaNoch keine Bewertungen
- Proton White Paper enDokument11 SeitenProton White Paper enhendri prasNoch keine Bewertungen
- Air Compressor Daisy Chain Termination - Rev 0Dokument1 SeiteAir Compressor Daisy Chain Termination - Rev 0mounrNoch keine Bewertungen
- I Need Free Serial Key of Acrobat Xi Pro - FixyaDokument3 SeitenI Need Free Serial Key of Acrobat Xi Pro - FixyaRamesh Gowda33% (3)
- A Complete Guide To Alpha OnlineDokument13 SeitenA Complete Guide To Alpha OnlinejoaovictorrmcNoch keine Bewertungen
- Emptech Activity 1Dokument6 SeitenEmptech Activity 1Ashley AgramonNoch keine Bewertungen
- Computer Logic Design Lab 213371Dokument24 SeitenComputer Logic Design Lab 213371Habib Ur rehmanNoch keine Bewertungen
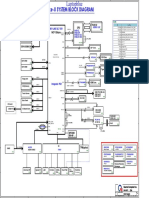
- ZAAA x32 Ironman SK (ZAA) & Captain SK (ZAAA) MB 6L E Version PDFDokument48 SeitenZAAA x32 Ironman SK (ZAA) & Captain SK (ZAAA) MB 6L E Version PDFSebastian StanacheNoch keine Bewertungen
- Release Notes - READDokument3 SeitenRelease Notes - READHari KurniadiNoch keine Bewertungen
- SF Current SchemaDokument158 SeitenSF Current SchemaorafinconsultantNoch keine Bewertungen
- Electronic Modular Control Panel II - para Motores EUIDokument168 SeitenElectronic Modular Control Panel II - para Motores EUIRobert Orosco B.Noch keine Bewertungen
- Seatel XX98 PCU Upgrade ProcessDokument8 SeitenSeatel XX98 PCU Upgrade ProcessmikeNoch keine Bewertungen
- Business Analyst Master's Program - Simplilearn - v3Dokument24 SeitenBusiness Analyst Master's Program - Simplilearn - v3Pradeep JNA75% (4)
- Total Result 194Dokument50 SeitenTotal Result 194S TompulNoch keine Bewertungen
- HTTPS: - WWW - Whois.com - Whois - Tech-Al - InfoDokument4 SeitenHTTPS: - WWW - Whois.com - Whois - Tech-Al - InfoΛουκάςNoch keine Bewertungen
- Duckademy LFI-RFI How LFI and RFI WorkDokument42 SeitenDuckademy LFI-RFI How LFI and RFI WorkKlentiB.ÇukariNoch keine Bewertungen
- 0 Dumpacore 3rd Com - Samsung.android - App.contactsDokument161 Seiten0 Dumpacore 3rd Com - Samsung.android - App.contactsJosé “José” CanNoch keine Bewertungen
- ASAP RoadmapDokument2 SeitenASAP RoadmapprakashssapNoch keine Bewertungen
- Kulubukedoguru Runotabixapika Farulepolo RejezaxogDokument2 SeitenKulubukedoguru Runotabixapika Farulepolo RejezaxogBISHOY magdyNoch keine Bewertungen
- IGV AssamblyDokument31 SeitenIGV AssamblyPhong le100% (1)
- Cyber ArkDokument2 SeitenCyber ArkHendra SoenderskovNoch keine Bewertungen
- The Fabric of Civilization: How Textiles Made the WorldVon EverandThe Fabric of Civilization: How Textiles Made the WorldBewertung: 4.5 von 5 Sternen4.5/5 (58)
- Hero Found: The Greatest POW Escape of the Vietnam WarVon EverandHero Found: The Greatest POW Escape of the Vietnam WarBewertung: 4 von 5 Sternen4/5 (19)
- Sully: The Untold Story Behind the Miracle on the HudsonVon EverandSully: The Untold Story Behind the Miracle on the HudsonBewertung: 4 von 5 Sternen4/5 (103)
- The Beekeeper's Lament: How One Man and Half a Billion Honey Bees Help Feed AmericaVon EverandThe Beekeeper's Lament: How One Man and Half a Billion Honey Bees Help Feed AmericaNoch keine Bewertungen
- Highest Duty: My Search for What Really MattersVon EverandHighest Duty: My Search for What Really MattersNoch keine Bewertungen
- The End of Craving: Recovering the Lost Wisdom of Eating WellVon EverandThe End of Craving: Recovering the Lost Wisdom of Eating WellBewertung: 4.5 von 5 Sternen4.5/5 (82)
- Dirt to Soil: One Family’s Journey into Regenerative AgricultureVon EverandDirt to Soil: One Family’s Journey into Regenerative AgricultureBewertung: 5 von 5 Sternen5/5 (125)
- The Future of Geography: How the Competition in Space Will Change Our WorldVon EverandThe Future of Geography: How the Competition in Space Will Change Our WorldBewertung: 4 von 5 Sternen4/5 (6)
- The Intel Trinity: How Robert Noyce, Gordon Moore, and Andy Grove Built the World's Most Important CompanyVon EverandThe Intel Trinity: How Robert Noyce, Gordon Moore, and Andy Grove Built the World's Most Important CompanyNoch keine Bewertungen
- Transformed: Moving to the Product Operating ModelVon EverandTransformed: Moving to the Product Operating ModelBewertung: 4 von 5 Sternen4/5 (1)
- System Error: Where Big Tech Went Wrong and How We Can RebootVon EverandSystem Error: Where Big Tech Went Wrong and How We Can RebootNoch keine Bewertungen
- Pale Blue Dot: A Vision of the Human Future in SpaceVon EverandPale Blue Dot: A Vision of the Human Future in SpaceBewertung: 4.5 von 5 Sternen4.5/5 (588)
- Permaculture for the Rest of Us: Abundant Living on Less than an AcreVon EverandPermaculture for the Rest of Us: Abundant Living on Less than an AcreBewertung: 4.5 von 5 Sternen4.5/5 (33)
- Reality+: Virtual Worlds and the Problems of PhilosophyVon EverandReality+: Virtual Worlds and the Problems of PhilosophyBewertung: 4 von 5 Sternen4/5 (24)
- How to Build a Car: The Autobiography of the World’s Greatest Formula 1 DesignerVon EverandHow to Build a Car: The Autobiography of the World’s Greatest Formula 1 DesignerBewertung: 4.5 von 5 Sternen4.5/5 (54)
- Fire on the Horizon: The Untold Story of the Gulf Oil DisasterVon EverandFire on the Horizon: The Untold Story of the Gulf Oil DisasterNoch keine Bewertungen
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindVon EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindNoch keine Bewertungen
- The Weather Machine: A Journey Inside the ForecastVon EverandThe Weather Machine: A Journey Inside the ForecastBewertung: 3.5 von 5 Sternen3.5/5 (31)
- Packing for Mars: The Curious Science of Life in the VoidVon EverandPacking for Mars: The Curious Science of Life in the VoidBewertung: 4 von 5 Sternen4/5 (1396)
- The Technology Trap: Capital, Labor, and Power in the Age of AutomationVon EverandThe Technology Trap: Capital, Labor, and Power in the Age of AutomationBewertung: 4.5 von 5 Sternen4.5/5 (46)
- The Manager's Path: A Guide for Tech Leaders Navigating Growth and ChangeVon EverandThe Manager's Path: A Guide for Tech Leaders Navigating Growth and ChangeBewertung: 4.5 von 5 Sternen4.5/5 (99)
- Broken Money: Why Our Financial System is Failing Us and How We Can Make it BetterVon EverandBroken Money: Why Our Financial System is Failing Us and How We Can Make it BetterBewertung: 5 von 5 Sternen5/5 (3)
- The Knowledge: How to Rebuild Our World from ScratchVon EverandThe Knowledge: How to Rebuild Our World from ScratchBewertung: 3.5 von 5 Sternen3.5/5 (133)
- Faster: How a Jewish Driver, an American Heiress, and a Legendary Car Beat Hitler's BestVon EverandFaster: How a Jewish Driver, an American Heiress, and a Legendary Car Beat Hitler's BestBewertung: 4 von 5 Sternen4/5 (28)
- The Things We Make: The Unknown History of Invention from Cathedrals to Soda Cans (Father's Day Gift for Science and Engineering Curious Dads)Von EverandThe Things We Make: The Unknown History of Invention from Cathedrals to Soda Cans (Father's Day Gift for Science and Engineering Curious Dads)Noch keine Bewertungen
- A Place of My Own: The Architecture of DaydreamsVon EverandA Place of My Own: The Architecture of DaydreamsBewertung: 4 von 5 Sternen4/5 (242)
- Four Battlegrounds: Power in the Age of Artificial IntelligenceVon EverandFour Battlegrounds: Power in the Age of Artificial IntelligenceBewertung: 5 von 5 Sternen5/5 (5)