Das könnte Ihnen auch gefallen
- Ensayo de MarshallDokument38 SeitenEnsayo de MarshallElving MendozaNoch keine Bewertungen
- C 135 PDFDokument34 SeitenC 135 PDFElving MendozaNoch keine Bewertungen
- Civil 3d-Leccion 3Dokument18 SeitenCivil 3d-Leccion 3Elving MendozaNoch keine Bewertungen
- El Arte de ProyectarDokument577 SeitenEl Arte de ProyectarElving Mendoza100% (1)
- c3d Best Practices PDFDokument172 Seitenc3d Best Practices PDFElving MendozaNoch keine Bewertungen
- Ensayo de Sísmica de RefracciónDokument33 SeitenEnsayo de Sísmica de Refracciónluijhy_203628Noch keine Bewertungen
- Extincion de Las ObligacionesDokument7 SeitenExtincion de Las ObligacionesElving MendozaNoch keine Bewertungen
- Gestion de Proyectos Informaticos2019-II - Sem01Dokument91 SeitenGestion de Proyectos Informaticos2019-II - Sem01Anonymous 51TELNSupeNoch keine Bewertungen
- Actividad Sena 2Dokument8 SeitenActividad Sena 2Mauser12100% (1)
- TrabajoDokument14 SeitenTrabajodarbarllenNoch keine Bewertungen
- Oracle y JavaDokument11 SeitenOracle y JavaMiguel AngelNoch keine Bewertungen
- 8ciberseguridadenlatransformaciondigitaldelosnegociosca 170416014954Dokument26 Seiten8ciberseguridadenlatransformaciondigitaldelosnegociosca 170416014954Ivan LlaqueNoch keine Bewertungen
- Manual de Entregas SorianaDokument27 SeitenManual de Entregas Sorianagamj710924Noch keine Bewertungen
- Semana 2 Arquitectura Basica de Un TraductorDokument39 SeitenSemana 2 Arquitectura Basica de Un TraductorGilner PapaNoch keine Bewertungen
- Sesion de Aprendizaje 1 XmindDokument3 SeitenSesion de Aprendizaje 1 XmindluchibilisNoch keine Bewertungen
- Seguridad de Tecnologías de Información, Instrumentos de Medicion.Dokument21 SeitenSeguridad de Tecnologías de Información, Instrumentos de Medicion.Chad WheelerNoch keine Bewertungen
- Ausentismo No Programado1A31-003-005 16 - NOV - 2018Dokument36 SeitenAusentismo No Programado1A31-003-005 16 - NOV - 2018Black DementhorNoch keine Bewertungen
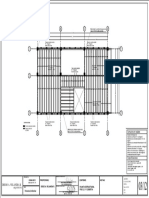
- Ejemplo Entrepiso MaderaDokument1 SeiteEjemplo Entrepiso MaderaMicHell GaRciaNoch keine Bewertungen
- Practica 11Dokument13 SeitenPractica 11Fernando VenegasNoch keine Bewertungen
- Implementación SoftwareDokument69 SeitenImplementación SoftwareEduardo de jesus lopez mendezNoch keine Bewertungen
- Manual Civil 3D 2010 - Diseã o Vial I - UnfvDokument80 SeitenManual Civil 3D 2010 - Diseã o Vial I - UnfvJuan Carlos Sanchez ParedesNoch keine Bewertungen
- Pregunta Taller 4Dokument3 SeitenPregunta Taller 4Angela Villamarin100% (1)
- Anatomy LearningDokument2 SeitenAnatomy LearningIván TorresNoch keine Bewertungen
- Opens UseDokument34 SeitenOpens UseJacqueline Julián JiménezNoch keine Bewertungen
- Desarrolle La Resolución de Los Problemas Mediante Sus Algoritmos en Pseudocódigo 2Dokument6 SeitenDesarrolle La Resolución de Los Problemas Mediante Sus Algoritmos en Pseudocódigo 2LizEblaNoch keine Bewertungen
- 1-PM Paso 1Dokument10 Seiten1-PM Paso 1Rodrigo ortegaNoch keine Bewertungen
- Evolucion de Las Bases de DatosDokument10 SeitenEvolucion de Las Bases de DatosFrancisco BozoNoch keine Bewertungen
- Reloj Biometrico1Dokument2 SeitenReloj Biometrico1Conejita LindaNoch keine Bewertungen
- Consultas AvanzadaDokument40 SeitenConsultas AvanzadaLuis Daniel MarmolNoch keine Bewertungen
- Guía en Pla y Proyectos NERY DIAZDokument2 SeitenGuía en Pla y Proyectos NERY DIAZYani Marisol Quevedo DonisNoch keine Bewertungen
- Actualizar El Firmware de Bluetooth - USB (V2C NOVERO - Radio Ford Sony MP3)Dokument4 SeitenActualizar El Firmware de Bluetooth - USB (V2C NOVERO - Radio Ford Sony MP3)OsirisRiverNoch keine Bewertungen
- Material y Evidencia de EEpromDokument11 SeitenMaterial y Evidencia de EEpromOscar Vergara RomeroNoch keine Bewertungen
- Conceptos Generales 2018Dokument25 SeitenConceptos Generales 2018Ivan Alvaro Torres RoblesNoch keine Bewertungen
- Protocolo Examen de Conocimientos Juridicos 2 Concurso de FA 2021Dokument4 SeitenProtocolo Examen de Conocimientos Juridicos 2 Concurso de FA 2021Libros de Medicina SaludNoch keine Bewertungen
- Trabajo Práctico Nro 3 Juana Correa Luna, Cantilo Trinidad, Chiarlone Sabina, Castellano Milagros 2do B SC 2Dokument4 SeitenTrabajo Práctico Nro 3 Juana Correa Luna, Cantilo Trinidad, Chiarlone Sabina, Castellano Milagros 2do B SC 2Anonymous L4Khw7OhNoch keine Bewertungen
- Camtasia StudioDokument3 SeitenCamtasia StudioEsmeralda ArenasNoch keine Bewertungen
- Ejemplo Sintaxis GherkinDokument5 SeitenEjemplo Sintaxis GherkinJuan NavarroNoch keine Bewertungen