Das könnte Ihnen auch gefallen
- Programação Matemática: Otimização Linear e Não LinearVon EverandProgramação Matemática: Otimização Linear e Não LinearNoch keine Bewertungen
- Trabalho de Matematica Aplicada - EditeDokument18 SeitenTrabalho de Matematica Aplicada - EditeJoaquim Saldeira ManuelNoch keine Bewertungen
- Pesquisa Binária - Análise de ComplexidadeDokument13 SeitenPesquisa Binária - Análise de ComplexidadeLorran PegorettiNoch keine Bewertungen
- Lista 1 Revisão 2Dokument5 SeitenLista 1 Revisão 2AndersonOliveiraNoch keine Bewertungen
- Inteligencia Artificial - QuestoesDokument4 SeitenInteligencia Artificial - QuestoesCaio Dos Santos Souza100% (2)
- Apostila de AlgoritmoDokument62 SeitenApostila de AlgoritmoJairo Martins0% (1)
- Aula 4 - ComplexidadeAlgoritmicaDokument12 SeitenAula 4 - ComplexidadeAlgoritmicaMário SitoeNoch keine Bewertungen
- Aula02 UnifeiDokument43 SeitenAula02 UnifeiPP LokoNoch keine Bewertungen
- Apontamentos Estudo IA FinalDokument24 SeitenApontamentos Estudo IA Finalpcplayer31Noch keine Bewertungen
- Um Breve Estudo Sobre Buscas No Contexto de IA: 1. Introduc AoDokument5 SeitenUm Breve Estudo Sobre Buscas No Contexto de IA: 1. Introduc AoKim AgliardiNoch keine Bewertungen
- Apols 1 e 2 Inteligência Artificial Aplicada Probabilidade e EstatísticaDokument79 SeitenApols 1 e 2 Inteligência Artificial Aplicada Probabilidade e EstatísticaClínica Popular LiberdadeNoch keine Bewertungen
- Apols 1 e 2 Inteligência Artificial Aplicada Probabilidade e EstatísticaDokument81 SeitenApols 1 e 2 Inteligência Artificial Aplicada Probabilidade e EstatísticaClínica Popular LiberdadeNoch keine Bewertungen
- Análise de AlgoritmosDokument24 SeitenAnálise de Algoritmoscopiarte piratiniNoch keine Bewertungen
- Apostila Logica 110210Dokument42 SeitenApostila Logica 110210Maellson MarquesNoch keine Bewertungen
- Execícios 1Dokument3 SeitenExecícios 1ranier_s1100% (1)
- Aps 3 Semestre UNIPDokument42 SeitenAps 3 Semestre UNIPBruno Auditore33% (3)
- Apostila 1 - Portugol StudioDokument20 SeitenApostila 1 - Portugol StudioEmília Rodrigues100% (1)
- Apostila AlgoritmoDokument13 SeitenApostila AlgoritmoMárcia100% (3)
- O Que É Um Algoritmo de Computador - Características, Tipos e ExemplosDokument8 SeitenO Que É Um Algoritmo de Computador - Características, Tipos e ExemplosXavier JoaquimNoch keine Bewertungen
- (TRADUÇÃO) 6 - ProceduresDokument24 Seiten(TRADUÇÃO) 6 - ProceduresMARCOS DIASNoch keine Bewertungen
- Port 2 IADokument4 SeitenPort 2 IAMarco Tulio SoaresNoch keine Bewertungen
- Apols Inteligencia ArtificialDokument9 SeitenApols Inteligencia ArtificialRodrigo Costa75% (4)
- Lista Busca Local PDFDokument7 SeitenLista Busca Local PDFAlessandro Gambin da SilvaNoch keine Bewertungen
- Lista1b PDFDokument3 SeitenLista1b PDFRicardo de AlmeidaNoch keine Bewertungen
- Aula 3Dokument22 SeitenAula 3Luana BarbosaNoch keine Bewertungen
- Aula 07 Complexidade de AlgoritmosDokument57 SeitenAula 07 Complexidade de AlgoritmosskimorodNoch keine Bewertungen
- Complexidade de AlgoritmosDokument9 SeitenComplexidade de AlgoritmospedrofrancischetoNoch keine Bewertungen
- 2034 - Apontamentos Programação e Algoritmia (Parte 1) - Engº Carlos MoraDokument33 Seiten2034 - Apontamentos Programação e Algoritmia (Parte 1) - Engº Carlos MoraLuís PerdigãoNoch keine Bewertungen
- Apostila - Algoritmos e Lógica de Programação - 2015-1Dokument54 SeitenApostila - Algoritmos e Lógica de Programação - 2015-1Marcelo Gomes PintoNoch keine Bewertungen
- Comportamento AssintóticoDokument36 SeitenComportamento AssintóticoPaulo HenriqueNoch keine Bewertungen
- Aula 03Dokument22 SeitenAula 03Marlon SousaNoch keine Bewertungen
- Guia 4 de Estudo de Ami (2021) - 034440Dokument16 SeitenGuia 4 de Estudo de Ami (2021) - 034440Carlos AgostinhoNoch keine Bewertungen
- Apostila de AlgoritmoDokument60 SeitenApostila de AlgoritmoVini garciaNoch keine Bewertungen
- Apostila ANSYSDokument33 SeitenApostila ANSYSmmarcus_Noch keine Bewertungen
- Laboratório de Programação I (Java)Dokument21 SeitenLaboratório de Programação I (Java)Fagner Fontes BatistaNoch keine Bewertungen
- Atividade - de - Reviso - Unidade - 2 RespondidoDokument5 SeitenAtividade - de - Reviso - Unidade - 2 RespondidoGIOVANNI MOREIRA GUIMARAESNoch keine Bewertungen
- 01 Fundamentos Da ComputaçãoDokument17 Seiten01 Fundamentos Da ComputaçãoWagner SouzaNoch keine Bewertungen
- Capítulo 3 - Técnicas de Busca HeurísticaDokument27 SeitenCapítulo 3 - Técnicas de Busca HeurísticaNatalia Sant' AnnaNoch keine Bewertungen
- Métodos de Busca - INARrDokument9 SeitenMétodos de Busca - INARrDanilo MunhepeNoch keine Bewertungen
- Lista Inteligência ArtificialDokument2 SeitenLista Inteligência ArtificialVítor Arêdes SoutoNoch keine Bewertungen
- Resumo Complexidade Assintótica de ProgramasDokument10 SeitenResumo Complexidade Assintótica de ProgramasLuiz ZiqNoch keine Bewertungen
- Função Holder Table Otimizada Por Enchame de Partículas Algoritmo PsoDokument6 SeitenFunção Holder Table Otimizada Por Enchame de Partículas Algoritmo PsoLaura SilvaNoch keine Bewertungen
- Correçao Do Teste IADokument3 SeitenCorreçao Do Teste IACarlos BritoNoch keine Bewertungen
- ATPS Pesquisa OperacionalDokument11 SeitenATPS Pesquisa Operacionaljean.representacoes61Noch keine Bewertungen
- Apostila de Algoritmos e Estruturas de Dados - Prof. Dr. Alexandre Luis Magalhães Levada (UFSCar)Dokument145 SeitenApostila de Algoritmos e Estruturas de Dados - Prof. Dr. Alexandre Luis Magalhães Levada (UFSCar)Allan MoreiraNoch keine Bewertungen
- ATPS Pesquisa OperacionalDokument11 SeitenATPS Pesquisa Operacionaljean.representacoes61Noch keine Bewertungen
- Síntese Programação LinearDokument4 SeitenSíntese Programação LinearJuliane BassetteNoch keine Bewertungen
- PSO - Definicao - e - Exemplos - Ipynb - ColaboratoryDokument6 SeitenPSO - Definicao - e - Exemplos - Ipynb - Colaboratoryclaraalmeida.ap2024Noch keine Bewertungen
- PAA Trabalho FinalDokument6 SeitenPAA Trabalho FinalAlice CabralNoch keine Bewertungen
- Questionário Capítulo 18Dokument5 SeitenQuestionário Capítulo 18guilhermedwNoch keine Bewertungen
- Algoritmos e Programação Estruturada Programação Estruturada para DevDokument52 SeitenAlgoritmos e Programação Estruturada Programação Estruturada para DevWanderley CarvalhoNoch keine Bewertungen
- Apostila PROMODELDokument39 SeitenApostila PROMODELHélder Oliveira SantosNoch keine Bewertungen
- Inteligencia ArtificialDokument6 SeitenInteligencia ArtificialLui ʕ •ᴥ•ʔNoch keine Bewertungen
- Matriz de ProximidadeDokument53 SeitenMatriz de ProximidadeLilliane Renata DefanteNoch keine Bewertungen
- Apostila Logica 110210 PDFDokument42 SeitenApostila Logica 110210 PDFVictor SouzaNoch keine Bewertungen
- Calculo de Complexidade de AlgoritmosDokument125 SeitenCalculo de Complexidade de AlgoritmosArnaldo Jr75% (4)
- Algoritmos e ComplexidadeDokument20 SeitenAlgoritmos e ComplexidadeDuarte NevesNoch keine Bewertungen
- CN - Lista de Exercicios - AB1 - 2015.2Dokument2 SeitenCN - Lista de Exercicios - AB1 - 2015.2Max MillerNoch keine Bewertungen
- Tallyta Carolyne Martins Da Silva Pivic PDFDokument15 SeitenTallyta Carolyne Martins Da Silva Pivic PDFGefté AlcantaraNoch keine Bewertungen
- Lista de Fisica 2Dokument5 SeitenLista de Fisica 2Gefté AlcantaraNoch keine Bewertungen
- Cadeia Markov PDFDokument39 SeitenCadeia Markov PDFJoao DiasNoch keine Bewertungen
- MATLABDokument37 SeitenMATLABRodrigo SilvaNoch keine Bewertungen
- Filtros DigitaisDokument12 SeitenFiltros DigitaisGefté AlcantaraNoch keine Bewertungen
- Filtros DigitaisDokument27 SeitenFiltros DigitaisCarlos JuniorNoch keine Bewertungen
- Aula 3Dokument68 SeitenAula 3Gefté AlcantaraNoch keine Bewertungen
- 15 Desempenho Na Objetiva - Após Analise Dos RecursosDokument440 Seiten15 Desempenho Na Objetiva - Após Analise Dos RecursosGefté Alcantara100% (1)
- Curso Técnico de RestauraçãoDokument2 SeitenCurso Técnico de RestauraçãoVítorFernandoMarquesCoitoNoch keine Bewertungen
- Termodinâmica - 3Dokument46 SeitenTermodinâmica - 3moises20caNoch keine Bewertungen
- Ficha Rakan (ATUAL)Dokument3 SeitenFicha Rakan (ATUAL)Fiky ColdNoch keine Bewertungen
- Guia de Identificação Das Pastagens Nativas Do Pantanal (2019)Dokument223 SeitenGuia de Identificação Das Pastagens Nativas Do Pantanal (2019)Andreia CostaNoch keine Bewertungen
- ANIM-012 - Manual Tosa Cocker SpanielDokument15 SeitenANIM-012 - Manual Tosa Cocker SpanielMarcos CelestinoNoch keine Bewertungen
- Sas2018 4Dokument17 SeitenSas2018 4jgabrielcdaviNoch keine Bewertungen
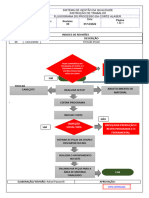
- 10 FLUXO CORTE LASER - Revisado 21-07-2020Dokument1 Seite10 FLUXO CORTE LASER - Revisado 21-07-2020Rafael PassarelliNoch keine Bewertungen
- 3258 Boletim Tecnico Eucatex SiliconeDokument3 Seiten3258 Boletim Tecnico Eucatex Siliconeedgar m paivaNoch keine Bewertungen
- Relatório de Levantamento MaterialDokument2 SeitenRelatório de Levantamento MaterialHeltonsubrg SystemNoch keine Bewertungen
- Moldes - Chapeu de MarinheiroDokument3 SeitenMoldes - Chapeu de Marinheiroph mixNoch keine Bewertungen
- Proteção de Sistemas PDFDokument23 SeitenProteção de Sistemas PDFRafael De Lima Gabardo100% (1)
- Equações DiferenciaisDokument45 SeitenEquações DiferenciaisDarkArkangel2Noch keine Bewertungen
- Apresentação TCC TamboreadorDokument39 SeitenApresentação TCC TamboreadorAllery SamNoch keine Bewertungen
- Poemas - Pablo NerudaDokument2 SeitenPoemas - Pablo NerudaDenise SiqueiraNoch keine Bewertungen
- Trabalho de TGA - Handy, Fayol e FordDokument9 SeitenTrabalho de TGA - Handy, Fayol e FordMarcos Roberto RosaNoch keine Bewertungen
- Cartilha FNS - Acesso A Recursos Da Saúde 2022Dokument166 SeitenCartilha FNS - Acesso A Recursos Da Saúde 2022vieiraianaNoch keine Bewertungen
- Check List BPFDokument11 SeitenCheck List BPFcassilda_carvalho@hotmail.comNoch keine Bewertungen
- Extensao Counitaria IDokument17 SeitenExtensao Counitaria Idércio nevesNoch keine Bewertungen
- Micro2 MincustoDokument28 SeitenMicro2 MincustoOrlando Francisco NhamussunaNoch keine Bewertungen
- Etapas Do Projeto de PesquisaDokument2 SeitenEtapas Do Projeto de Pesquisajoao vitorNoch keine Bewertungen
- 002 - Criminologia AMBIENTALDokument19 Seiten002 - Criminologia AMBIENTALf_f_claudio100% (2)
- Prova Teorica NR 06Dokument2 SeitenProva Teorica NR 06Lih AssisNoch keine Bewertungen
- Lista 1 MruvDokument5 SeitenLista 1 MruvCamilla BuçardNoch keine Bewertungen
- Guia Local v1810 - CE Crateus - 06-11-2018Dokument22 SeitenGuia Local v1810 - CE Crateus - 06-11-2018Marcelo ClaroNoch keine Bewertungen
- Registro Na Jucesp de Armazém GeralDokument3 SeitenRegistro Na Jucesp de Armazém Geralabertura de empresaNoch keine Bewertungen
- BudaKamakura PDFDokument16 SeitenBudaKamakura PDFjuniorterapiaNoch keine Bewertungen
- Noção Intuitiva de LimitesDokument14 SeitenNoção Intuitiva de LimitesThayla CastroNoch keine Bewertungen
- Desenvolvimento Da Radiologia IntervencionistaDokument3 SeitenDesenvolvimento Da Radiologia IntervencionistaProf-Alexsandro FerreiraNoch keine Bewertungen
- Programa de Hipertrofia Feminina GRATIS Nivel 1 MescladoDokument11 SeitenPrograma de Hipertrofia Feminina GRATIS Nivel 1 MescladoCasa na VilaNoch keine Bewertungen
- Permissão de TrabalhoDokument5 SeitenPermissão de TrabalhoFRANCISCO PEREIRANoch keine Bewertungen