Das könnte Ihnen auch gefallen
- (Science-Astronomy-Telescope-Tech) Robust Attitude Control of A Telescope 2 Pags MissingDokument18 Seiten(Science-Astronomy-Telescope-Tech) Robust Attitude Control of A Telescope 2 Pags Missing오상진Noch keine Bewertungen
- Team C - Implementation of PID Control Using Inverted PendulumDokument23 SeitenTeam C - Implementation of PID Control Using Inverted PendulumHHNoch keine Bewertungen
- Mining Example LagrangianDokument7 SeitenMining Example LagrangianMax ShervingtonNoch keine Bewertungen
- 10.1007@s00006 016 0698 2Dokument16 Seiten10.1007@s00006 016 0698 2Uli Urio-LegoNoch keine Bewertungen
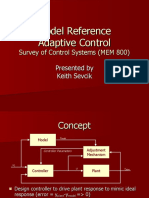
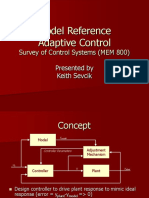
- Survey of Control Systems (MEM 800) PresentedDokument26 SeitenSurvey of Control Systems (MEM 800) PresentedvananhbarcaNoch keine Bewertungen
- Automatic Tuning of Pid Controller Using Fuzzy LogicDokument8 SeitenAutomatic Tuning of Pid Controller Using Fuzzy LogicKha BùiNoch keine Bewertungen
- Pid Controller Design by Modified Ziegler-Nichols Method: M. Hypiusová, S. KajanDokument10 SeitenPid Controller Design by Modified Ziegler-Nichols Method: M. Hypiusová, S. KajanTrí NguyễnNoch keine Bewertungen
- Elec/Tele/Phtn 4123 Electrical/Telecommunications Design Proficiency Lab2Dokument11 SeitenElec/Tele/Phtn 4123 Electrical/Telecommunications Design Proficiency Lab2Joseph NguyenNoch keine Bewertungen
- Controller Design Based On Transient Response CriteriaDokument46 SeitenController Design Based On Transient Response Criteriameseret sisayNoch keine Bewertungen
- Tài Liệu Môn Thực Tập Kỹ Thuật Điều Khiển Tự Động Và Điều Khiển Quá TrìnhDokument220 SeitenTài Liệu Môn Thực Tập Kỹ Thuật Điều Khiển Tự Động Và Điều Khiển Quá TrìnhivorNoch keine Bewertungen
- Forecast Filter of KalmanDokument12 SeitenForecast Filter of KalmanJorge LunaNoch keine Bewertungen
- 4TH Year PPT - ModDokument20 Seiten4TH Year PPT - ModDivya BhartiNoch keine Bewertungen
- First Order and Integrator Dynamical System: Laboratory Experiment No.1Dokument8 SeitenFirst Order and Integrator Dynamical System: Laboratory Experiment No.1Rodrigo TavarezNoch keine Bewertungen
- Model Reference Adaptive Control: Survey of Control Systems (MEM 800)Dokument26 SeitenModel Reference Adaptive Control: Survey of Control Systems (MEM 800)Gilmar LeiteNoch keine Bewertungen
- Computational Physics: (Modeling, Numerical Methods, and Problem Solving)Dokument25 SeitenComputational Physics: (Modeling, Numerical Methods, and Problem Solving)Aknel KaiserNoch keine Bewertungen
- Load Frequency Control Via Internal Model Control SchemesDokument25 SeitenLoad Frequency Control Via Internal Model Control SchemesRahul PandeyNoch keine Bewertungen
- Real - Time DC Motor Position Control by (FPID) Controllers and Design (FLC) Using Labview Software SimulationDokument10 SeitenReal - Time DC Motor Position Control by (FPID) Controllers and Design (FLC) Using Labview Software SimulationmadanesherNoch keine Bewertungen
- IoPSensors2016 SlidesDokument64 SeitenIoPSensors2016 Slideskishan2016Noch keine Bewertungen
- Li - GENQEC Model For Stability Studies in PSSEDokument26 SeitenLi - GENQEC Model For Stability Studies in PSSEpower systemNoch keine Bewertungen
- Dennis Jin Development of A Stable Control System For A SegwayDokument25 SeitenDennis Jin Development of A Stable Control System For A SegwayIsrael JosueNoch keine Bewertungen
- Conte OpenSees Snopt A Framework For Finite Element Based Optimization 26oct2012 FinalDokument24 SeitenConte OpenSees Snopt A Framework For Finite Element Based Optimization 26oct2012 Finalgreenday3Noch keine Bewertungen
- Adaptive Control: Presented by Harikrishna Satish.TDokument22 SeitenAdaptive Control: Presented by Harikrishna Satish.THari ThotaNoch keine Bewertungen
- Kalman Filter For Mobile Robot Localization: Who? From?Dokument29 SeitenKalman Filter For Mobile Robot Localization: Who? From?PauloNoch keine Bewertungen
- MRACDokument26 SeitenMRACRj YashNoch keine Bewertungen
- Tài Liệu Môn Thực Tập Kỹ Thuật Điều Khiển Tự Động Và Điều Khiển Quá TrìnhDokument220 SeitenTài Liệu Môn Thực Tập Kỹ Thuật Điều Khiển Tự Động Và Điều Khiển Quá Trình20146054Noch keine Bewertungen
- PID ControlDokument56 SeitenPID ControlSyafRizal100% (1)
- 5.1 Bode Plots and Nichols ChartsDokument7 Seiten5.1 Bode Plots and Nichols ChartsMd. HarunNoch keine Bewertungen
- Robust Control For Variable-Speed Two-Bladed Horizontal-Axis Wind Turbines Via Chattering ControlDokument26 SeitenRobust Control For Variable-Speed Two-Bladed Horizontal-Axis Wind Turbines Via Chattering ControlYolandaNoch keine Bewertungen
- Design of Optimal PID Controller For Inverted Pendulum Using Genetic AlgorithmDokument3 SeitenDesign of Optimal PID Controller For Inverted Pendulum Using Genetic AlgorithmPhuongle LeNoch keine Bewertungen
- Workshop 4 - Draft2Dokument6 SeitenWorkshop 4 - Draft2Saatwick MathurNoch keine Bewertungen
- Inverted Pendulum Design With Hardware Fuzzy Logic ControllerDokument6 SeitenInverted Pendulum Design With Hardware Fuzzy Logic ControlleranonymousxxNoch keine Bewertungen
- Generate Stepper Motor Linear Speed Profile in Real TimeDokument14 SeitenGenerate Stepper Motor Linear Speed Profile in Real TimeClaudio PinheiroNoch keine Bewertungen
- Ballbeam EE380 Fall09 PDFDokument13 SeitenBallbeam EE380 Fall09 PDFShahid KINoch keine Bewertungen
- Mfa Merit Exercises 5 Simulink 5174 2Dokument8 SeitenMfa Merit Exercises 5 Simulink 5174 2JamesNoch keine Bewertungen
- Cascaded PIDDokument14 SeitenCascaded PIDTatenda BizureNoch keine Bewertungen
- Vout Vin: EC2006: Control SystemsDokument6 SeitenVout Vin: EC2006: Control SystemsMANOJ KUMAR DASNoch keine Bewertungen
- UE18EC254 DVD ModelESA Scheme&Solution PDFDokument16 SeitenUE18EC254 DVD ModelESA Scheme&Solution PDFM Chandan ShankarNoch keine Bewertungen
- Micro Assignment-1 PDFDokument26 SeitenMicro Assignment-1 PDFSurya TejaNoch keine Bewertungen
- Repetitive ControlDokument22 SeitenRepetitive ControlShri KulkarniNoch keine Bewertungen
- Logic Circuits and Switching Theory: Number System: Arithmetic OperationDokument35 SeitenLogic Circuits and Switching Theory: Number System: Arithmetic OperationKevin Garcia OcceñaNoch keine Bewertungen
- Control Lab NoteDokument19 SeitenControl Lab NoteSK-062; 470; Afsana Anjum AkhiNoch keine Bewertungen
- Problem Nº1.: S G K G K S SDokument4 SeitenProblem Nº1.: S G K G K S SalexandraNoch keine Bewertungen
- DTGDokument9 SeitenDTGkapilkumar18Noch keine Bewertungen
- Direct and Indirect Self-Tuning Generalized Minimum Variance ControlDokument12 SeitenDirect and Indirect Self-Tuning Generalized Minimum Variance ControlSadagopan RajaNoch keine Bewertungen
- Lab 4: Motor Control: 1 OverviewDokument7 SeitenLab 4: Motor Control: 1 OverviewPaul Emmanuel MarkNoch keine Bewertungen
- Dig Sheet 6Dokument4 SeitenDig Sheet 6Ahmed AbdeazizNoch keine Bewertungen
- Colorado School of Mines CHEN403: 1 Where MinDokument12 SeitenColorado School of Mines CHEN403: 1 Where MinpoopoophoNoch keine Bewertungen
- Week 4 Assignment 1 SolutionDokument10 SeitenWeek 4 Assignment 1 Solutionkirankuma.jagtapNoch keine Bewertungen
- MIT16 30F10 Lec04Dokument16 SeitenMIT16 30F10 Lec04Cristian NapoleNoch keine Bewertungen
- BTL HuyTan-doneDokument11 SeitenBTL HuyTan-donePHONG LÊ BÁNoch keine Bewertungen
- Bao Dang Thai 2022 11 28Dokument71 SeitenBao Dang Thai 2022 11 28KHOA LÊ ĐĂNGNoch keine Bewertungen
- MIT RuleDokument17 SeitenMIT RuleHữu Thịnh ĐỗNoch keine Bewertungen
- ps3 (1) From MAE 4780Dokument5 Seitenps3 (1) From MAE 4780fooz10Noch keine Bewertungen
- Projects With Microcontrollers And PICCVon EverandProjects With Microcontrollers And PICCBewertung: 5 von 5 Sternen5/5 (1)
- Topics in Engineering Logic: International Series of Monographs on Electronics and InstrumentationVon EverandTopics in Engineering Logic: International Series of Monographs on Electronics and InstrumentationNoch keine Bewertungen
- Transistor Electronics: Use of Semiconductor Components in Switching OperationsVon EverandTransistor Electronics: Use of Semiconductor Components in Switching OperationsBewertung: 1 von 5 Sternen1/5 (1)
- Lec16 - Optimal ControlDokument13 SeitenLec16 - Optimal Controljavadmousavi440Noch keine Bewertungen
- Some Examples of Dynamic ProgrammingDokument2 SeitenSome Examples of Dynamic Programmingmousa bagherpourjahromiNoch keine Bewertungen
- Optimization and Control: Examples Sheet 2: LQG ModelsDokument2 SeitenOptimization and Control: Examples Sheet 2: LQG Modelsmousa bagherpourjahromiNoch keine Bewertungen
- Optimization and Control: Examples Sheet 3: Continuous-Time ModelsDokument2 SeitenOptimization and Control: Examples Sheet 3: Continuous-Time Modelsmousa bagherpourjahromiNoch keine Bewertungen
- Lec12 PDFDokument39 SeitenLec12 PDFmousa bagherpourjahromiNoch keine Bewertungen
- Exsheet 1Dokument2 SeitenExsheet 1mousa bagherpourjahromiNoch keine Bewertungen
- 16.323 Principles of Optimal Control: Mit OpencoursewareDokument24 Seiten16.323 Principles of Optimal Control: Mit OpencoursewareTomas SalmoiraghiNoch keine Bewertungen
- 16.323 Principles of Optimal Control: Mit OpencoursewareDokument26 Seiten16.323 Principles of Optimal Control: Mit Opencoursewaremousa bagherpourjahromiNoch keine Bewertungen
- 16.323 Principles of Optimal Control: Mit OpencoursewareDokument9 Seiten16.323 Principles of Optimal Control: Mit Opencoursewaremousa bagherpourjahromiNoch keine Bewertungen
- Optimal Control MatlabDokument25 SeitenOptimal Control MatlabMarcus MacêdoNoch keine Bewertungen
- 16.323 Principles of Optimal Control: Mit OpencoursewareDokument27 Seiten16.323 Principles of Optimal Control: Mit Opencoursewaremousa bagherpourjahromiNoch keine Bewertungen
- DP - Intro With LinksDokument10 SeitenDP - Intro With LinksBasisoneooneNoch keine Bewertungen
- 16.323 Principles of Optimal Control: Mit OpencoursewareDokument27 Seiten16.323 Principles of Optimal Control: Mit Opencoursewaremousa bagherpourjahromiNoch keine Bewertungen
- 16.323 Principles of Optimal Control: Mit OpencoursewareDokument32 Seiten16.323 Principles of Optimal Control: Mit Opencoursewaremousa bagherpourjahromiNoch keine Bewertungen
- Optimal Tracking Control of Motion SystemsDokument11 SeitenOptimal Tracking Control of Motion Systemsmousa bagherpourjahromiNoch keine Bewertungen
- Lec 2Dokument25 SeitenLec 2debasishmee5808Noch keine Bewertungen
- Lec 2Dokument25 SeitenLec 2debasishmee5808Noch keine Bewertungen
- Optimal PID DesignDokument5 SeitenOptimal PID Designmousa bagherpourjahromiNoch keine Bewertungen
- Cost Function SelectedDokument6 SeitenCost Function Selectedmousa bagherpourjahromiNoch keine Bewertungen
- Lec 1Dokument18 SeitenLec 1cavanzasNoch keine Bewertungen
- Hamiltom JaccobiDokument16 SeitenHamiltom Jaccobimousa bagherpourjahromiNoch keine Bewertungen
- Inequality ConstraintsDokument4 SeitenInequality Constraintsmousa bagherpourjahromiNoch keine Bewertungen
- Optimal Control Designs For Systems With Input Saturations and Rate LimitersDokument4 SeitenOptimal Control Designs For Systems With Input Saturations and Rate Limitersmousa bagherpourjahromiNoch keine Bewertungen
- Optimal PID Design PDFDokument6 SeitenOptimal PID Design PDFmousa bagherpourjahromiNoch keine Bewertungen
- Backstepping Design of Nonlinear Optimal Control: Jianyun Zhang, and Yuanzhang Sun, Senior Member, IEEEDokument6 SeitenBackstepping Design of Nonlinear Optimal Control: Jianyun Zhang, and Yuanzhang Sun, Senior Member, IEEEmousa bagherpourjahromiNoch keine Bewertungen
- Approximation of Optimal PDFDokument10 SeitenApproximation of Optimal PDFmousa bagherpourjahromiNoch keine Bewertungen
- Succeeding Biomedical Admissions Medical School 41ik6Rfb28LDokument4 SeitenSucceeding Biomedical Admissions Medical School 41ik6Rfb28LBagus WijayaNoch keine Bewertungen
- Transportaion Problem - 2 Marks and 16 Marks QuestionsDokument12 SeitenTransportaion Problem - 2 Marks and 16 Marks QuestionsThaddeus Moore86% (7)
- Mitigation Stick SlipDokument6 SeitenMitigation Stick SlipCarlos SensanoNoch keine Bewertungen
- New Technology For Closed-Loop System IdentificationDokument5 SeitenNew Technology For Closed-Loop System IdentificationAnonymous yugocxnNoch keine Bewertungen
- Requirements Traceability Matrix ChecklistDokument1 SeiteRequirements Traceability Matrix Checklistsg_rickyNoch keine Bewertungen
- EC360 Soft Computing - Syllabus PDFDokument2 SeitenEC360 Soft Computing - Syllabus PDFvoxovNoch keine Bewertungen
- 149738Dokument38 Seiten149738Rana MoqadyNoch keine Bewertungen
- How Supply Chains Benefit From Using Generative AI: Show ResourcesDokument8 SeitenHow Supply Chains Benefit From Using Generative AI: Show Resourcesmarios.charalambousNoch keine Bewertungen
- Signals & Systems Unit IIDokument16 SeitenSignals & Systems Unit IIvsalaiselvamNoch keine Bewertungen
- Kendali Digital 5Dokument13 SeitenKendali Digital 5SutantoNoch keine Bewertungen
- Carnot CycleDokument6 SeitenCarnot CycleJohn TruckerNoch keine Bewertungen
- Alberta Social Studies Curriculum K-12Dokument22 SeitenAlberta Social Studies Curriculum K-12Rivka ShareNoch keine Bewertungen
- SPM MCQ - Easier To Study MCQ Question Bank SPM MCQ - Easier To Study MCQ Question BankDokument744 SeitenSPM MCQ - Easier To Study MCQ Question Bank SPM MCQ - Easier To Study MCQ Question BankMohd RazaNoch keine Bewertungen
- Peddy Citra Nesa-Resume - ExtDokument16 SeitenPeddy Citra Nesa-Resume - ExtAgung Prasetyo NugrohoNoch keine Bewertungen
- Success Story Uni HD - BASFDokument1 SeiteSuccess Story Uni HD - BASFKanjakha PalNoch keine Bewertungen
- A Comparative Study On Testing Techniques of SoftwareDokument6 SeitenA Comparative Study On Testing Techniques of SoftwareInternational Journal of Innovative Science and Research TechnologyNoch keine Bewertungen
- CH 69Dokument14 SeitenCH 69Michael LangatNoch keine Bewertungen
- Chapter 2 Principles of ManagementDokument5 SeitenChapter 2 Principles of ManagementSybil Mae PastoleroNoch keine Bewertungen
- AIFutureTestingeGuideTechWell 0 PDFDokument18 SeitenAIFutureTestingeGuideTechWell 0 PDFPéter TóthNoch keine Bewertungen
- Capstone Project 1Dokument47 SeitenCapstone Project 1priyanka allaka100% (3)
- MCH3008 Lab ProjectDokument4 SeitenMCH3008 Lab ProjectEJAZ AHMADNoch keine Bewertungen
- Thermodynamics and Chemical EquilibriumDokument40 SeitenThermodynamics and Chemical EquilibriumDotan NutodNoch keine Bewertungen
- A Survey On Probabilistically Constrained Optimization ProblemsDokument10 SeitenA Survey On Probabilistically Constrained Optimization ProblemsRaghuveer ChandraNoch keine Bewertungen
- AI Project Word FileDokument21 SeitenAI Project Word Fileaj3093Noch keine Bewertungen
- Ai in Semiconductor Manufacturing PaperDokument6 SeitenAi in Semiconductor Manufacturing PaperYashwanth GowdaNoch keine Bewertungen
- 2017 Book Industrial Internet of ThingsDokument714 Seiten2017 Book Industrial Internet of ThingsItzel Morales93% (14)
- The Complete Proof of Knapsack Problem Is NP - CompletenessDokument5 SeitenThe Complete Proof of Knapsack Problem Is NP - CompletenessFrank WangNoch keine Bewertungen
- 1.4.introduction To Agility and Agile ProcessDokument23 Seiten1.4.introduction To Agility and Agile ProcessMohamed Bilal100% (1)
- 06507312Dokument2 Seiten06507312Ridho IrawanNoch keine Bewertungen
- Adaptive Control PDFDokument2 SeitenAdaptive Control PDFArjun PrasadNoch keine Bewertungen