Das könnte Ihnen auch gefallen
- Unit 4Dokument128 SeitenUnit 4kkarthiksNoch keine Bewertungen
- UNIT 5 Synchronous MotorDokument17 SeitenUNIT 5 Synchronous Motorruchita dahadNoch keine Bewertungen
- Electric Traction - ReferenceDokument19 SeitenElectric Traction - ReferenceShrestha SanjuNoch keine Bewertungen
- Qustion Bank: Unit Iv - Conventional & Solid State Speed Control of D.C. DrivesDokument4 SeitenQustion Bank: Unit Iv - Conventional & Solid State Speed Control of D.C. DrivesBelayneh TadesseNoch keine Bewertungen
- Guerra, John Nichol N. Bsme 3C (Ac and DC Ass.2)Dokument22 SeitenGuerra, John Nichol N. Bsme 3C (Ac and DC Ass.2)John Nichol GuerraNoch keine Bewertungen
- Induction Motor: Principle of OperationDokument7 SeitenInduction Motor: Principle of OperationAbhishek ChibNoch keine Bewertungen
- Ee LawDokument11 SeitenEe LawI am Just TrollingNoch keine Bewertungen
- What Is Meant by A Load On A Generator? A Load On A Motor?Dokument9 SeitenWhat Is Meant by A Load On A Generator? A Load On A Motor?I am Just TrollingNoch keine Bewertungen
- Enercon Homework 4Dokument19 SeitenEnercon Homework 4Ezekiel Brizuela100% (4)
- Different Methods of Speed Control of Three-Phase PDFDokument7 SeitenDifferent Methods of Speed Control of Three-Phase PDFRicardo BerizzoNoch keine Bewertungen
- Speed Control of DC MotorDokument31 SeitenSpeed Control of DC Motorabhinav. alpheus651997Noch keine Bewertungen
- Unit VDokument23 SeitenUnit VDhaval PatelNoch keine Bewertungen
- Electric Drives ControlDokument29 SeitenElectric Drives ControlNebyou DanielNoch keine Bewertungen
- Types of MotorsDokument12 SeitenTypes of MotorsMatin Inamdar100% (1)
- Four Quadrant OperationDokument9 SeitenFour Quadrant OperationMOTILAL SUTHAR215291Noch keine Bewertungen
- Sri Shakthi Institute of Engg and Technology: Two Marks Questions and AnswersDokument12 SeitenSri Shakthi Institute of Engg and Technology: Two Marks Questions and AnswersdhivyadevinNoch keine Bewertungen
- EEE Lab Viva QDokument5 SeitenEEE Lab Viva Qkamalilakshmanan3Noch keine Bewertungen
- Electric Vehicle 4th ModuleDokument19 SeitenElectric Vehicle 4th ModuleSimi BaniNoch keine Bewertungen
- The Advantages and Hazards of DC MotorsDokument6 SeitenThe Advantages and Hazards of DC MotorsGalco IndustrialNoch keine Bewertungen
- Electrical Machines II AnswerDokument24 SeitenElectrical Machines II AnswerGurulathan SoosairajNoch keine Bewertungen
- DC Motor S: Anand 08338958770Dokument79 SeitenDC Motor S: Anand 08338958770Rohit AvasthiNoch keine Bewertungen
- Electric Vehicle 4th ModuleDokument13 SeitenElectric Vehicle 4th ModuleAmruth DeshpandeNoch keine Bewertungen
- Esw2 RomeroDokument22 SeitenEsw2 RomeroRomero, Ken Angelo B.Noch keine Bewertungen
- Report On Lecture 38Dokument5 SeitenReport On Lecture 38Surajit SahaNoch keine Bewertungen
- LCIs and Syn Motors Applied To Roller Mills - Zayechek - 2000Dokument10 SeitenLCIs and Syn Motors Applied To Roller Mills - Zayechek - 2000Parameswararao BillaNoch keine Bewertungen
- Topic: DC Motor Using Mechanical Application: New Era University College of Engineering and TechnologyDokument13 SeitenTopic: DC Motor Using Mechanical Application: New Era University College of Engineering and TechnologyMAr Lon Dela CruzNoch keine Bewertungen
- Resume B Ing Sistem Kendali Mesin Listrik 1Dokument7 SeitenResume B Ing Sistem Kendali Mesin Listrik 1Vandy DpNoch keine Bewertungen
- Answers 4,5,6Dokument8 SeitenAnswers 4,5,6Mohsin TariqNoch keine Bewertungen
- DC Serv O-Mo TOR: Engr. M.BILALDokument28 SeitenDC Serv O-Mo TOR: Engr. M.BILALBilalNoch keine Bewertungen
- Electric DrivesDokument35 SeitenElectric Drivesbabli.panchal1984Noch keine Bewertungen
- Unit - I Synchronous GeneratorDokument25 SeitenUnit - I Synchronous GeneratorVenkatesan SwamyNoch keine Bewertungen
- Syncronous MotorDokument22 SeitenSyncronous MotorSambhav JainNoch keine Bewertungen
- Infant Monitoring System Using Co2 Sensor-Project ReportDokument59 SeitenInfant Monitoring System Using Co2 Sensor-Project ReportRajesh Kumar0% (1)
- Braking Schemes of TractionDokument7 SeitenBraking Schemes of TractionSuraj BhushanNoch keine Bewertungen
- DC Motor Speed Control: Bayan University For Science & TechnologyDokument12 SeitenDC Motor Speed Control: Bayan University For Science & TechnologyAltayeb AbdulhameedNoch keine Bewertungen
- Induction Motor Control by Vector Control Method.: Miss. Bhagyashree Thool, Miss. Kalyani C. WakhareDokument6 SeitenInduction Motor Control by Vector Control Method.: Miss. Bhagyashree Thool, Miss. Kalyani C. WakhareASumeethKumarNoch keine Bewertungen
- Squirrel Cage Induction Motor Have Some AdvantagesDokument7 SeitenSquirrel Cage Induction Motor Have Some AdvantagesMuhd Rifdi Che AbRahimNoch keine Bewertungen
- IDS NewDokument128 SeitenIDS NewShahbaz Ali100% (1)
- IDC Unit-4Dokument9 SeitenIDC Unit-4Gaurav SinghNoch keine Bewertungen
- Servo Control Facts: Baldor Electric CompanyDokument24 SeitenServo Control Facts: Baldor Electric CompanyRizwan HameedNoch keine Bewertungen
- Servo Control Facts: Baldor Electric CompanyDokument24 SeitenServo Control Facts: Baldor Electric Companyafe2000must9083Noch keine Bewertungen
- Spical Electrical Machines 2 MarksDokument20 SeitenSpical Electrical Machines 2 Markskarthicgroup100% (1)
- Unit 2 2marksDokument6 SeitenUnit 2 2marksKannan TindivanamNoch keine Bewertungen
- Siskind DC Machines Q&A AnswersDokument11 SeitenSiskind DC Machines Q&A AnswersAlbany Smash100% (5)
- AC Into DC MotorDokument9 SeitenAC Into DC MotorIvan RisticNoch keine Bewertungen
- Servo MechanismDokument24 SeitenServo Mechanismmushahid980Noch keine Bewertungen
- 2-Em2 em - OptDokument17 Seiten2-Em2 em - OptVenkatasamy VijayarajNoch keine Bewertungen
- DC Motors Starting MethodsDokument6 SeitenDC Motors Starting MethodsSai Teja KondraNoch keine Bewertungen
- Speed Control of DC MotorDokument19 SeitenSpeed Control of DC MotorVijaya LakshmiNoch keine Bewertungen
- Electrical Machines: Lecture Notes for Electrical Machines CourseVon EverandElectrical Machines: Lecture Notes for Electrical Machines CourseNoch keine Bewertungen
- Study of a reluctance magnetic gearbox for energy storage system applicationVon EverandStudy of a reluctance magnetic gearbox for energy storage system applicationBewertung: 1 von 5 Sternen1/5 (1)
- AC Electric Motors Control: Advanced Design Techniques and ApplicationsVon EverandAC Electric Motors Control: Advanced Design Techniques and ApplicationsFouad GiriNoch keine Bewertungen
- Electric Motor Control: DC, AC, and BLDC MotorsVon EverandElectric Motor Control: DC, AC, and BLDC MotorsBewertung: 4.5 von 5 Sternen4.5/5 (19)
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetVon EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNoch keine Bewertungen
- Ee Gate 2021 Syllabus PDFDokument4 SeitenEe Gate 2021 Syllabus PDFSidhuSidNoch keine Bewertungen
- 57Dokument4 Seiten57SidhuSid100% (1)
- 1067 1084 PDFDokument18 Seiten1067 1084 PDFSidhuSidNoch keine Bewertungen
- EV BasicsDokument30 SeitenEV BasicsSidhuSidNoch keine Bewertungen
- ChoppersDokument19 SeitenChoppersSidhuSidNoch keine Bewertungen
- 57Dokument4 Seiten57SidhuSid100% (1)
- Electric and Hybrid VehiclesDokument14 SeitenElectric and Hybrid VehiclesbitchNoch keine Bewertungen
- Revaluation Payment Receipt PDFDokument1 SeiteRevaluation Payment Receipt PDFSidhuSidNoch keine Bewertungen
- Resume Sample College Student AcademicDokument2 SeitenResume Sample College Student AcademicSidhuSidNoch keine Bewertungen
- Composition Tips PDFDokument8 SeitenComposition Tips PDFSidhuSidNoch keine Bewertungen
- Roll No TCS Reference ID: Hall Ticket: TNQT Digital - 2 For Batch of 2020Dokument1 SeiteRoll No TCS Reference ID: Hall Ticket: TNQT Digital - 2 For Batch of 2020SidhuSidNoch keine Bewertungen
- Conversion of Gpa To Percentage KTUDokument1 SeiteConversion of Gpa To Percentage KTUAnonymous DbmKEDxNoch keine Bewertungen
- Secure Coding. Practical Steps To Defend Your Web Apps.: Interested in Learning More?Dokument8 SeitenSecure Coding. Practical Steps To Defend Your Web Apps.: Interested in Learning More?SidhuSidNoch keine Bewertungen
- Resume Sample College Student AcademicDokument1 SeiteResume Sample College Student Academicjonptr16_829811789Noch keine Bewertungen
- EE595S: Class Lecture Notes Chapter 14: Induction Motor DrivesDokument66 SeitenEE595S: Class Lecture Notes Chapter 14: Induction Motor DrivesTalha MehmoodNoch keine Bewertungen
- 1 4958498Dokument7 Seiten1 4958498SidhuSidNoch keine Bewertungen
- L-33 (DP) (Pe) ( (Ee) Nptel)Dokument14 SeitenL-33 (DP) (Pe) ( (Ee) Nptel)Hung NguyenNoch keine Bewertungen
- Lec 1Dokument14 SeitenLec 1SidhuSidNoch keine Bewertungen
- FT QFRR (: Ilfi+frtDokument2 SeitenFT QFRR (: Ilfi+frtSidhuSidNoch keine Bewertungen
- ARDUINO Project Titles 2017Dokument4 SeitenARDUINO Project Titles 2017Rajaa SaravananNoch keine Bewertungen
- Module - Iii: DC Motor Drives - Chopper Fed DC Motor Drives, Cycloconverter For Drive ApplicationsDokument27 SeitenModule - Iii: DC Motor Drives - Chopper Fed DC Motor Drives, Cycloconverter For Drive ApplicationsSidhuSidNoch keine Bewertungen
- Lec 1Dokument14 SeitenLec 1SidhuSidNoch keine Bewertungen
- Lec 1Dokument36 SeitenLec 1cgmpcc3Noch keine Bewertungen
- Lecture NotesDokument56 SeitenLecture NotesSidhuSidNoch keine Bewertungen
- Z TransformDokument20 SeitenZ TransformMxaz MyzxNoch keine Bewertungen
- NotificationExamination PDFDokument2 SeitenNotificationExamination PDFSidhuSidNoch keine Bewertungen
- LCS NotesDokument24 SeitenLCS NotesSidhuSidNoch keine Bewertungen
- Circuit Breaker Arc PhenomenaDokument11 SeitenCircuit Breaker Arc PhenomenaSidhuSidNoch keine Bewertungen
- Physic IntroductionDokument1 SeitePhysic IntroductionSidhuSidNoch keine Bewertungen
- Servo System 3Dokument3 SeitenServo System 3Minn Thet Naing100% (1)
- 12V Battery Level Indicator CircuitDokument27 Seiten12V Battery Level Indicator Circuitjayris2060049Noch keine Bewertungen
- BDP PDFDokument28 SeitenBDP PDFjanolgo17Noch keine Bewertungen
- What Is Propeller Drop and How To Measure Propeller Drop?Dokument5 SeitenWhat Is Propeller Drop and How To Measure Propeller Drop?francis100% (1)
- Helac Series PowerTilt Service Manual HY34-1410Dokument60 SeitenHelac Series PowerTilt Service Manual HY34-1410bkmin7Noch keine Bewertungen
- CM3202 Preliminary: Features Product DescriptionDokument12 SeitenCM3202 Preliminary: Features Product Description81968Noch keine Bewertungen
- Single-Phase On-Grid String Inverter: FeaturesDokument2 SeitenSingle-Phase On-Grid String Inverter: FeaturesJadson RaphaelNoch keine Bewertungen
- Fraunhofer HSF Report Presentation 2018Dokument15 SeitenFraunhofer HSF Report Presentation 2018Taso GegiaNoch keine Bewertungen
- Experiment No. 2 Identification of Resistor Color Codes and Verification of Ohm'S LawDokument7 SeitenExperiment No. 2 Identification of Resistor Color Codes and Verification of Ohm'S LawJames Patrick TorresNoch keine Bewertungen
- L-33 (SM) (Ia&c) ( (Ee) Nptel)Dokument18 SeitenL-33 (SM) (Ia&c) ( (Ee) Nptel)Marvin BayanayNoch keine Bewertungen
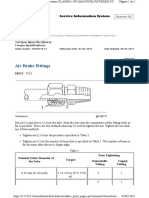
- Torque-Air Brake FittingsDokument2 SeitenTorque-Air Brake Fittingsyoga_jpbmbmNoch keine Bewertungen
- Sandvik: SLC S30 SH292 MP JB10Dokument1 SeiteSandvik: SLC S30 SH292 MP JB10Themba MafaNoch keine Bewertungen
- Steering Wheel Swap, EPC Light, Manual Transmission and 'Tiptronic' Fault CodesDokument1 SeiteSteering Wheel Swap, EPC Light, Manual Transmission and 'Tiptronic' Fault CodesarielfoxtoolsNoch keine Bewertungen
- RV Single Deflection Grille: Materials Size Surface FinishDokument2 SeitenRV Single Deflection Grille: Materials Size Surface Finishsuan170Noch keine Bewertungen
- 4054 ACtrossDokument18 Seiten4054 ACtrossRudi KurniawanNoch keine Bewertungen
- Bomco F1600 Mud Pump Parts BookDokument28 SeitenBomco F1600 Mud Pump Parts BookArleyTrujillo1224Noch keine Bewertungen
- EC2000 ManualDokument7 SeitenEC2000 Manualemiliqn velikovNoch keine Bewertungen
- Sree Buddha College of Engineering, Pattoor: 08.607 Microcontroller Lab (TA) Lab ManualDokument103 SeitenSree Buddha College of Engineering, Pattoor: 08.607 Microcontroller Lab (TA) Lab ManualAr UNNoch keine Bewertungen
- Hydraulic System TroubleshootingDokument9 SeitenHydraulic System TroubleshootingSantos Quiñones ParimangoNoch keine Bewertungen
- Sun2000 30ktl A 33ktl 33ktl E001 40ktl User ManualDokument106 SeitenSun2000 30ktl A 33ktl 33ktl E001 40ktl User Manualابو حسان الهويدNoch keine Bewertungen
- Schlage P513-325 Rekeying ManualDokument32 SeitenSchlage P513-325 Rekeying ManualBob CrosbyNoch keine Bewertungen
- SRB 301 Ma Operating Instructions Safety-Monitoring ModulesDokument6 SeitenSRB 301 Ma Operating Instructions Safety-Monitoring ModulesMustafa EranpurwalaNoch keine Bewertungen
- Roots Blower Operating ManualDokument15 SeitenRoots Blower Operating Manualanup_nairNoch keine Bewertungen
- FORCE 12 Powered Mixer Operating Manual and User GuideDokument18 SeitenFORCE 12 Powered Mixer Operating Manual and User GuideNicolasAvilaPizarroNoch keine Bewertungen
- Delhi Transco Limited: (220 KV Grid Substation at Preet Vihar)Dokument35 SeitenDelhi Transco Limited: (220 KV Grid Substation at Preet Vihar)Ñàmàñ JàiñNoch keine Bewertungen
- Introduction To HEVDokument106 SeitenIntroduction To HEVKhaire Sushom100% (1)
- Circuit Breaker Analyzer & Timer CAT34: DescriptionDokument4 SeitenCircuit Breaker Analyzer & Timer CAT34: Descriptionkenlavie2Noch keine Bewertungen
- 11kv Kiosk Panel DrawingDokument12 Seiten11kv Kiosk Panel Drawingakcakoca_81Noch keine Bewertungen
- BE3DDokument63 SeitenBE3DLoja De Telemóveis AlfNoch keine Bewertungen
- C100 Service Training Manual:: All Wheel Drive (AWD)Dokument18 SeitenC100 Service Training Manual:: All Wheel Drive (AWD)Frenky HuangNoch keine Bewertungen