Das könnte Ihnen auch gefallen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- AONS21321: General Description Product SummaryDokument6 SeitenAONS21321: General Description Product SummaryStoica VictorNoch keine Bewertungen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- DMP2160U: Not Recommended For New Design USEDokument5 SeitenDMP2160U: Not Recommended For New Design USEStoica VictorNoch keine Bewertungen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- 20V P-Channel MOSFET: Features General DescriptionDokument5 Seiten20V P-Channel MOSFET: Features General DescriptionStoica VictorNoch keine Bewertungen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
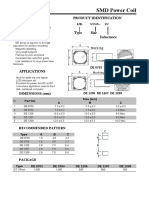
- De1207 220Dokument2 SeitenDe1207 220Stoica VictorNoch keine Bewertungen
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Tda7233 PDFDokument7 SeitenTda7233 PDFStoica VictorNoch keine Bewertungen
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Tda2030 PDFDokument10 SeitenTda2030 PDFStoica Victor0% (1)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
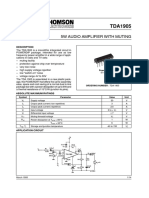
- 5W Audio Amplifier With Muting: DescriptionDokument15 Seiten5W Audio Amplifier With Muting: DescriptionStoica VictorNoch keine Bewertungen
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- 1.8V To 28V Input, PWM Step-Up Controllers in MAX: General Description FeaturesDokument18 Seiten1.8V To 28V Input, PWM Step-Up Controllers in MAX: General Description FeaturesStoica VictorNoch keine Bewertungen
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- Bipolar Stepper DriverDokument2 SeitenBipolar Stepper Drivershinta_kun100% (1)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- Special Electrical Machines PDFDokument151 SeitenSpecial Electrical Machines PDFlaxmandasriNoch keine Bewertungen
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Nema 34 Stepper Motor SpecsDokument9 SeitenNema 34 Stepper Motor Specsm95.hidalgoNoch keine Bewertungen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Documentation Stepper MotorDokument22 SeitenDocumentation Stepper MotorsolidwormNoch keine Bewertungen
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Bujinmadamotor Step by StepDokument32 SeitenBujinmadamotor Step by StepVector X MonNoch keine Bewertungen
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- 418 Automatic Railway Gate Control SystemDokument27 Seiten418 Automatic Railway Gate Control SystemRam VBIT100% (1)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- Btech1 PDFDokument29 SeitenBtech1 PDFPOOJA GUPTANoch keine Bewertungen
- STK672 080Dokument18 SeitenSTK672 080Gerardo WarmerdamNoch keine Bewertungen
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- AN003 - Dcstep Basics and WizardDokument9 SeitenAN003 - Dcstep Basics and WizardParaschiv DariusNoch keine Bewertungen
- An Experimental Study of Ball-On-flat Wear On A Newly Developed Rotational TribometerDokument10 SeitenAn Experimental Study of Ball-On-flat Wear On A Newly Developed Rotational TribometerDavid Rafael RamírezNoch keine Bewertungen
- Adafruit Motor ShieldDokument56 SeitenAdafruit Motor ShieldBruno MoraisNoch keine Bewertungen
- Stepper MotorDokument4 SeitenStepper Motor1020-Santhosh kumar. JNoch keine Bewertungen
- T8-Mini CNC Router Complete GuideDokument9 SeitenT8-Mini CNC Router Complete GuideRayner MihailovNoch keine Bewertungen
- A5984 DatasheetDokument28 SeitenA5984 DatasheetIndraz NilNoch keine Bewertungen
- Manual Motores Do Ferro Velho SanyoDokument64 SeitenManual Motores Do Ferro Velho SanyoanclamixNoch keine Bewertungen
- Stepper GeneralDokument316 SeitenStepper GeneralMassimo TormenNoch keine Bewertungen
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Annexure Display "Hello World" Message Using Internal UartDokument29 SeitenAnnexure Display "Hello World" Message Using Internal UartGagan NaiduNoch keine Bewertungen
- Driver Azul PDFDokument24 SeitenDriver Azul PDFElectronicaMecatronicsNoch keine Bewertungen
- cg8436s enDokument102 Seitencg8436s engeorgedenielNoch keine Bewertungen
- Unit 3 CNC Machine Tools: StructureDokument17 SeitenUnit 3 CNC Machine Tools: StructureRohit GhulanavarNoch keine Bewertungen
- 6295 4 00 PDFDokument12 Seiten6295 4 00 PDFTrent ScheuerNoch keine Bewertungen
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Accurate and Cost-Effective Mini CNC Plotter: Sara Raad Qasim Haider Mohammad Mustafa FalahDokument6 SeitenAccurate and Cost-Effective Mini CNC Plotter: Sara Raad Qasim Haider Mohammad Mustafa FalahRamleelakal OfficialNoch keine Bewertungen
- CNC ControllerDokument12 SeitenCNC ControllerMihai ViteazuNoch keine Bewertungen
- MC PLC Lab 2013Dokument37 SeitenMC PLC Lab 2013sivaeeinfoNoch keine Bewertungen
- data/ftp/PLC/FBs Manual/Manual 2/chapter 11 PDFDokument60 Seitendata/ftp/PLC/FBs Manual/Manual 2/chapter 11 PDFwijanarkoNoch keine Bewertungen
- 38Dokument132 Seiten38Mina Aklimandos WadeaNoch keine Bewertungen
- GB - Catalogue - Stepper MotorsDokument39 SeitenGB - Catalogue - Stepper MotorsAgustinNoch keine Bewertungen
- Pen PlotterDokument24 SeitenPen PlotterMridul SethiNoch keine Bewertungen
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Novel Dual-Excitation Permanent Magnet Vernier Machine: Akio Toba Thomas A. LipoDokument6 SeitenNovel Dual-Excitation Permanent Magnet Vernier Machine: Akio Toba Thomas A. LipoNenad Kostadinovic50% (2)