Das könnte Ihnen auch gefallen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Impact of Microteaching On Engineering Students' Communication SkillsDokument9 SeitenImpact of Microteaching On Engineering Students' Communication SkillsClaudia Retamoso LlamasNoch keine Bewertungen
- Docencia 03Dokument18 SeitenDocencia 03Claudia Retamoso LlamasNoch keine Bewertungen
- Photocatalysis of 4-Chlorophenol Mediated by Tio Fixed To Concrete SurfacesDokument6 SeitenPhotocatalysis of 4-Chlorophenol Mediated by Tio Fixed To Concrete SurfacesClaudia Retamoso LlamasNoch keine Bewertungen
- Competition As An Innovative Student-Centered Learning Method For Open-Ended Laboratory WorkDokument5 SeitenCompetition As An Innovative Student-Centered Learning Method For Open-Ended Laboratory WorkClaudia Retamoso LlamasNoch keine Bewertungen
- Mechanism and Machine Theory: J.S. RaoDokument28 SeitenMechanism and Machine Theory: J.S. RaoClaudia Retamoso LlamasNoch keine Bewertungen
- A Formal Identification and Re-Sequencing Process For Developing Sequencing Alternatives in CPM SchedulesDokument15 SeitenA Formal Identification and Re-Sequencing Process For Developing Sequencing Alternatives in CPM SchedulesClaudia Retamoso LlamasNoch keine Bewertungen
- Mobile Ad Hoc Network-Enabled Collaboration Framework Supporting Civil Engineering Emergency Response OperationsDokument12 SeitenMobile Ad Hoc Network-Enabled Collaboration Framework Supporting Civil Engineering Emergency Response OperationsClaudia Retamoso LlamasNoch keine Bewertungen
- Análisis 06 PDFDokument18 SeitenAnálisis 06 PDFClaudia Retamoso LlamasNoch keine Bewertungen
- Tools, Products, Services: The Charrette Tool For Collecting InformationDokument2 SeitenTools, Products, Services: The Charrette Tool For Collecting InformationClaudia Retamoso LlamasNoch keine Bewertungen
- Theoretically Comparing Design Thinking To Design Methods For Large-Scale Infrastructure SystemsDokument8 SeitenTheoretically Comparing Design Thinking To Design Methods For Large-Scale Infrastructure SystemsClaudia Retamoso LlamasNoch keine Bewertungen
- Epilogue: From Building Evaluation To Building Performance Evaluation and BeyondDokument7 SeitenEpilogue: From Building Evaluation To Building Performance Evaluation and BeyondClaudia Retamoso LlamasNoch keine Bewertungen
- The Charrette Test Method: Stanford UniversityDokument28 SeitenThe Charrette Test Method: Stanford UniversityClaudia Retamoso LlamasNoch keine Bewertungen
- Topology Optimization Aided Structural Design: Interpretation, Computational Aspects and 3D PrintingDokument33 SeitenTopology Optimization Aided Structural Design: Interpretation, Computational Aspects and 3D PrintingClaudia Retamoso LlamasNoch keine Bewertungen
- Engineering Structures: Lawrence VirginDokument8 SeitenEngineering Structures: Lawrence VirginClaudia Retamoso LlamasNoch keine Bewertungen
- Comparison of Deterministic and Stochastic Method in Operational Modal Analysis in Application For Civil Engineering StructuresDokument6 SeitenComparison of Deterministic and Stochastic Method in Operational Modal Analysis in Application For Civil Engineering StructuresClaudia Retamoso LlamasNoch keine Bewertungen
- Advanced Engineering Informatics: Full Length ArticleDokument11 SeitenAdvanced Engineering Informatics: Full Length ArticleClaudia Retamoso LlamasNoch keine Bewertungen
- Powder Technology: Juan A. Torres-Luna, Nancy R. Sanabria, José G. CarriazoDokument7 SeitenPowder Technology: Juan A. Torres-Luna, Nancy R. Sanabria, José G. CarriazoClaudia Retamoso LlamasNoch keine Bewertungen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- MOTOR Brushless ss2814 Xiii 1000kvDokument1 SeiteMOTOR Brushless ss2814 Xiii 1000kvsalah eddineNoch keine Bewertungen
- DRM Transmitter PresentationDokument22 SeitenDRM Transmitter PresentationJuan Jose PerezNoch keine Bewertungen
- Final App - FlsDokument9 SeitenFinal App - Flsjunebug172100% (1)
- Research Papers in Mechanical Engineering Free Download PDFDokument4 SeitenResearch Papers in Mechanical Engineering Free Download PDFtitamyg1p1j2Noch keine Bewertungen
- Republic Act No. 10913 - Anti-Distracted Driving ActDokument4 SeitenRepublic Act No. 10913 - Anti-Distracted Driving Act...Noch keine Bewertungen
- 229.testing of Ycgf-11 With F6150-FieldFailureDokument13 Seiten229.testing of Ycgf-11 With F6150-FieldFailureSukant Kumar Mohanty50% (2)
- Peugeot 3008 BrochureDokument18 SeitenPeugeot 3008 Brochuremihai12moveNoch keine Bewertungen
- Lord!: KnowledgeDokument161 SeitenLord!: KnowledgeAsra Zafar khanNoch keine Bewertungen
- Quidway 20S5300 20series 20ethernet 20switches 20hardware 20Dokument98 SeitenQuidway 20S5300 20series 20ethernet 20switches 20hardware 20Hamza_yakan967Noch keine Bewertungen
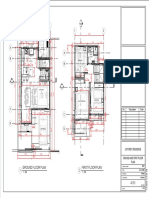
- Floor Plans & ElevationsDokument6 SeitenFloor Plans & Elevationsbryan cardonaNoch keine Bewertungen
- V1 V2 Cal PRCDokument5 SeitenV1 V2 Cal PRCCyril J PadiyathNoch keine Bewertungen
- Lab Manual 11 Infrared SpectrosDokument5 SeitenLab Manual 11 Infrared SpectrosLuca Selva CampobassoNoch keine Bewertungen
- ARRI SkyPanel - DMX Protocol Specification V4.4Dokument88 SeitenARRI SkyPanel - DMX Protocol Specification V4.4Quan LyNoch keine Bewertungen
- TabulationDokument13 SeitenTabulationWildan PushNoch keine Bewertungen
- Oracle E-Business Suite Release 12.2.6 Readme (Doc ID 2114016.1)Dokument18 SeitenOracle E-Business Suite Release 12.2.6 Readme (Doc ID 2114016.1)KingNoch keine Bewertungen
- Cinegy User ManualDokument253 SeitenCinegy User ManualNizamuddin KaziNoch keine Bewertungen
- MMD 74 XX DR PS 0020 - C03Dokument1 SeiteMMD 74 XX DR PS 0020 - C03bramexNoch keine Bewertungen
- Source 22Dokument2 SeitenSource 22Alexander FloresNoch keine Bewertungen
- Draft BLDokument3 SeitenDraft BLimam faodjiNoch keine Bewertungen
- To Dmaic or Not To DmaicDokument1 SeiteTo Dmaic or Not To Dmaicritch99Noch keine Bewertungen
- LN3 Geng2340Dokument61 SeitenLN3 Geng2340Seth VineetNoch keine Bewertungen
- ReadMe STEP7 Professional V14 enUS PDFDokument74 SeitenReadMe STEP7 Professional V14 enUS PDFAndre Luis SilvaNoch keine Bewertungen
- Kaltreparatur-Textil WT2332 enDokument20 SeitenKaltreparatur-Textil WT2332 enFerAK47aNoch keine Bewertungen
- Cyclic Redundancy CheckDokument3 SeitenCyclic Redundancy CheckmeerashekarNoch keine Bewertungen
- En 12604 (2000) (E)Dokument7 SeitenEn 12604 (2000) (E)Carlos LanzillottoNoch keine Bewertungen
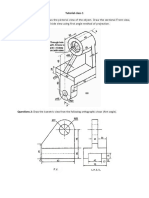
- Tutorial Class 1 Questions 1Dokument2 SeitenTutorial Class 1 Questions 1Bố Quỳnh ChiNoch keine Bewertungen
- Furniture Catlog 2023 PDFDokument90 SeitenFurniture Catlog 2023 PDFBilal ToorNoch keine Bewertungen
- Black Invention MythsDokument16 SeitenBlack Invention MythsjoetylorNoch keine Bewertungen
- Raft TheoryDokument37 SeitenRaft Theorymuktha mukuNoch keine Bewertungen
- By George G. Meyerhof, F. Asce: J. Geotech. Engrg., 1983, 109 (6) : 797-806Dokument10 SeitenBy George G. Meyerhof, F. Asce: J. Geotech. Engrg., 1983, 109 (6) : 797-806PoYing HuangNoch keine Bewertungen