Das könnte Ihnen auch gefallen
- UF2246 - Reparación de pequeños electrodomésticos y herramientas eléctricasVon EverandUF2246 - Reparación de pequeños electrodomésticos y herramientas eléctricasBewertung: 2.5 von 5 Sternen2.5/5 (3)
- Comprobación y optimización del programa cnc para el mecanizado por arranque de viruta. FMEH0109Von EverandComprobación y optimización del programa cnc para el mecanizado por arranque de viruta. FMEH0109Noch keine Bewertungen
- Sistemas de control integrados en bienes de equipo y maquinaria industrial y elaboración de la documentación técnica. FMEE0208Von EverandSistemas de control integrados en bienes de equipo y maquinaria industrial y elaboración de la documentación técnica. FMEE0208Noch keine Bewertungen
- Caso OCADODokument4 SeitenCaso OCADOTania Monterd100% (1)
- Módulo de cinemática DMU de Catia V5Von EverandMódulo de cinemática DMU de Catia V5Bewertung: 5 von 5 Sternen5/5 (1)
- Métodos Matriciales para ingenieros con MATLABVon EverandMétodos Matriciales para ingenieros con MATLABBewertung: 5 von 5 Sternen5/5 (1)
- UF1875 - Gestión de recursos, servicios y de la red de comunicacionesVon EverandUF1875 - Gestión de recursos, servicios y de la red de comunicacionesNoch keine Bewertungen
- Control de Motor EncoderDokument29 SeitenControl de Motor Encodercymonso100% (15)
- Maquinas de Soporte VectorialDokument107 SeitenMaquinas de Soporte VectorialBasilio Diaz PNoch keine Bewertungen
- Ortografía A La Mano. Reglas, Ejercicios, Recomendaciones - Julián OsornoDokument208 SeitenOrtografía A La Mano. Reglas, Ejercicios, Recomendaciones - Julián OsornoKurAmadorMaya50% (2)
- Reparación de instalaciones automatizadas. ELEE0109Von EverandReparación de instalaciones automatizadas. ELEE0109Noch keine Bewertungen
- Ryodoraku PDFDokument10 SeitenRyodoraku PDFPaulaAguilarNoch keine Bewertungen
- Tesis Valvulas de Relevo de PresiónDokument46 SeitenTesis Valvulas de Relevo de PresiónKurAmadorMayaNoch keine Bewertungen
- Python - R. M. Lewis PDFDokument51 SeitenPython - R. M. Lewis PDFJesus LeDds Pillaca CárdenasNoch keine Bewertungen
- Diseño y Construcción de Un BALL and BEAMDokument5 SeitenDiseño y Construcción de Un BALL and BEAMdaednicaNoch keine Bewertungen
- PID de Un Motor Eléctrico Realizado Por Henry Chamba ParraDokument8 SeitenPID de Un Motor Eléctrico Realizado Por Henry Chamba ParraHenry Chamba ParraNoch keine Bewertungen
- Protocolo (P6) Intercambiador de Calor de MetalDokument36 SeitenProtocolo (P6) Intercambiador de Calor de MetalKurAmadorMayaNoch keine Bewertungen
- Laboratorio1 Diagrama Bloques Simulink V2Dokument8 SeitenLaboratorio1 Diagrama Bloques Simulink V2AndresChangoluisaNoch keine Bewertungen
- Lab Control 1Dokument4 SeitenLab Control 1Jhon Fernando MolinaNoch keine Bewertungen
- TC1 1 Paguay Quilumbaquin PDFDokument3 SeitenTC1 1 Paguay Quilumbaquin PDFEdgar PaguayNoch keine Bewertungen
- PRÁCTICAS 1 y 2Dokument24 SeitenPRÁCTICAS 1 y 2Anonymous kRijj0ESJyNoch keine Bewertungen
- Informe Proyecto DSPDokument4 SeitenInforme Proyecto DSPYeisson RicardoNoch keine Bewertungen
- Sistema de ClasificaciónDokument6 SeitenSistema de ClasificaciónDobleH7Noch keine Bewertungen
- Entrega Final ProyectoDokument5 SeitenEntrega Final ProyectoKIi LeeNoch keine Bewertungen
- Informe 2 Yanez ReyesDokument3 SeitenInforme 2 Yanez Reyesmario yanezNoch keine Bewertungen
- Informe Final 3Dokument9 SeitenInforme Final 3Edwin ContrerasNoch keine Bewertungen
- Control PID Con Labview y TIA Portal PDFDokument7 SeitenControl PID Con Labview y TIA Portal PDFAndres DavidNoch keine Bewertungen
- ControladoresDokument25 SeitenControladoresutghstghsNoch keine Bewertungen
- Trabajo Final de ControlDokument7 SeitenTrabajo Final de ControlAlbamaria2014Noch keine Bewertungen
- Informe de Laboratorio 9 - Identificacion de SistemasDokument31 SeitenInforme de Laboratorio 9 - Identificacion de SistemasLuis Alexander Juarez MercedesNoch keine Bewertungen
- Pino Viviana Alvarez Danilo Proyecto Final ControlAutomatico5ADokument7 SeitenPino Viviana Alvarez Danilo Proyecto Final ControlAutomatico5AViVi PinoNoch keine Bewertungen
- Informe Final 3Dokument7 SeitenInforme Final 3Harold Cruz SalasNoch keine Bewertungen
- R3 Control 2Dokument17 SeitenR3 Control 2David Mtz SotoNoch keine Bewertungen
- Diagrama de Bloques PDFDokument24 SeitenDiagrama de Bloques PDFJherson Miranda CabanillasNoch keine Bewertungen
- Trabajo Teorico Practico.... MatlabDokument18 SeitenTrabajo Teorico Practico.... MatlabKiria MierezNoch keine Bewertungen
- 100000I38N Sistemas de Control Digital Guía N 2 - Rev0001Dokument7 Seiten100000I38N Sistemas de Control Digital Guía N 2 - Rev0001marcoNoch keine Bewertungen
- Controlador PIDDokument5 SeitenControlador PIDAlfredo TepanNoch keine Bewertungen
- Identificación No Paramétrica de Un Brazo Robótico de 2 GDL Utilizando La Red Neuronal RBFDokument6 SeitenIdentificación No Paramétrica de Un Brazo Robótico de 2 GDL Utilizando La Red Neuronal RBFRey Vidangos PonceNoch keine Bewertungen
- Practica 5 ControlDokument8 SeitenPractica 5 ControlAlexis MercadoNoch keine Bewertungen
- Parcial Bohorquez LauraDokument9 SeitenParcial Bohorquez LauraBaez VullaNoch keine Bewertungen
- Avance Del Proyecto-EmbDokument4 SeitenAvance Del Proyecto-EmbAdrian CarhuazNoch keine Bewertungen
- Simulink y MatlabDokument16 SeitenSimulink y MatlabSamuel Granados MejíaNoch keine Bewertungen
- Informe #3 Control D.FDokument3 SeitenInforme #3 Control D.FStalin MiguelNoch keine Bewertungen
- Informe de La Practica 2Dokument6 SeitenInforme de La Practica 2Lucho ZmNoch keine Bewertungen
- Informe de Laboratorio 1Dokument3 SeitenInforme de Laboratorio 1Estefany NogueraNoch keine Bewertungen
- Lab 1Dokument2 SeitenLab 1mohamedNoch keine Bewertungen
- Laboratorio 1 - Sensores PDFDokument6 SeitenLaboratorio 1 - Sensores PDFJulian DavidNoch keine Bewertungen
- Manipulador Robotico de 3 Grados de LibertadDokument6 SeitenManipulador Robotico de 3 Grados de LibertadRICHAR1051100% (4)
- Simulacion ROBOT 2GDLDokument14 SeitenSimulacion ROBOT 2GDLjulieta marquezNoch keine Bewertungen
- Guía de Práctica #1 - Modelamiento de Sistemas Bàsicos Con SimulinkDokument7 SeitenGuía de Práctica #1 - Modelamiento de Sistemas Bàsicos Con SimulinkFabricio Quimis MarcilloNoch keine Bewertungen
- Control de Velocidad de MotorDokument5 SeitenControl de Velocidad de MotorBrayan Saldarriaga MesaNoch keine Bewertungen
- Practica1 SCADokument14 SeitenPractica1 SCADiego Adriel Rodriguez FloresNoch keine Bewertungen
- Practica No 3 Etn807Dokument5 SeitenPractica No 3 Etn807Armandinho Colque VargasNoch keine Bewertungen
- Luis Saldarriaga 90GDokument14 SeitenLuis Saldarriaga 90GMarcelo Saldarriaga RiveraNoch keine Bewertungen
- Laboratorio1 Diagrama Bloques Simulink V2 (Realizado1) 2Dokument14 SeitenLaboratorio1 Diagrama Bloques Simulink V2 (Realizado1) 2Andres UchoNoch keine Bewertungen
- LABORATORIO No1Dokument5 SeitenLABORATORIO No1Andrey GalvisNoch keine Bewertungen
- Actividad Integradora Robotica Unidad 5Dokument5 SeitenActividad Integradora Robotica Unidad 5Alejandro GarciaNoch keine Bewertungen
- Guia IV - Sistemas de Control I NewDokument6 SeitenGuia IV - Sistemas de Control I NewYeremi DavilaNoch keine Bewertungen
- 203041-1 - Fase 2 - David BolañoDokument17 Seiten203041-1 - Fase 2 - David BolañodabNoch keine Bewertungen
- P4 CdiscretoDokument4 SeitenP4 CdiscretoLuis AmendañoNoch keine Bewertungen
- Control de Servo Sistemas No Lineales Usando Redes Neuronales PDFDokument18 SeitenControl de Servo Sistemas No Lineales Usando Redes Neuronales PDFDemetria SniderNoch keine Bewertungen
- RHONNDokument13 SeitenRHONNMarco RodríguezNoch keine Bewertungen
- Laboratorio5 Ajuste de Ganancia Lugar RaicesDokument16 SeitenLaboratorio5 Ajuste de Ganancia Lugar RaicesBryam FajardoNoch keine Bewertungen
- Guia V - Sistemas de Control IIDokument3 SeitenGuia V - Sistemas de Control IIAlonzo SanchezNoch keine Bewertungen
- Informe Parcial 3Dokument6 SeitenInforme Parcial 3IVAN CAMILO RESTREPO GUERRANoch keine Bewertungen
- Modelado y renderizado basado en imágenes: Explorando el realismo visual: técnicas en visión por computadoraVon EverandModelado y renderizado basado en imágenes: Explorando el realismo visual: técnicas en visión por computadoraNoch keine Bewertungen
- X Calculos de Agua Espuma Tar Salinas Victoria MonterreyDokument9 SeitenX Calculos de Agua Espuma Tar Salinas Victoria MonterreyKurAmadorMayaNoch keine Bewertungen
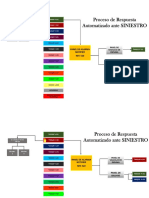
- Proceso de Respuesta Automatizado Ante SiniestroDokument14 SeitenProceso de Respuesta Automatizado Ante SiniestroKurAmadorMayaNoch keine Bewertungen
- VIII Especificaciones SALINAS VDokument21 SeitenVIII Especificaciones SALINAS VKurAmadorMayaNoch keine Bewertungen
- Sistema Humedo 3 Simbologia: Nombre de Proyecto PropietarioDokument1 SeiteSistema Humedo 3 Simbologia: Nombre de Proyecto PropietarioKurAmadorMayaNoch keine Bewertungen
- SIMULACIONDokument6 SeitenSIMULACIONKurAmadorMayaNoch keine Bewertungen
- Ley FiscalDokument97 SeitenLey FiscalKurAmadorMayaNoch keine Bewertungen
- Contrato Ley de La Industria AzucareraDokument7 SeitenContrato Ley de La Industria AzucareraKurAmadorMayaNoch keine Bewertungen
- Efecto MeissnerDokument22 SeitenEfecto MeissnerKurAmadorMayaNoch keine Bewertungen
- Apunte No. 7 Separadores Liquido - LiquidoDokument8 SeitenApunte No. 7 Separadores Liquido - LiquidoKurAmadorMayaNoch keine Bewertungen
- Tema 18 - Procesos Sísmicos EspecialesDokument13 SeitenTema 18 - Procesos Sísmicos EspecialesPabloMuller17Noch keine Bewertungen
- Data Science 2022Dokument19 SeitenData Science 2022kanoxs23Noch keine Bewertungen
- Algoritmo de Entrenamiento Perceptron UnicapaDokument10 SeitenAlgoritmo de Entrenamiento Perceptron UnicapaWilsonRealesNoch keine Bewertungen
- Sistema de Información Agrícola para Facilitar La Compra y Venta de Productos Por Medio de La Economía ColaborativaDokument86 SeitenSistema de Información Agrícola para Facilitar La Compra y Venta de Productos Por Medio de La Economía Colaborativaalexander apraezNoch keine Bewertungen
- Tipos de InteligenciaDokument18 SeitenTipos de InteligenciaMaricela Leovina Melendez MonasterioNoch keine Bewertungen
- Inteligencia ArtificialDokument8 SeitenInteligencia ArtificialMaryuli Betania Vargas BorjaNoch keine Bewertungen
- Introduccion A BioinspiradosDokument32 SeitenIntroduccion A BioinspiradosLisset Duarte100% (1)
- Introduccion La Ingenieria Computacional IIC 0600Dokument7 SeitenIntroduccion La Ingenieria Computacional IIC 0600Ana Lilian Ramirez GomezNoch keine Bewertungen
- Reconocimiento de Placas Vehiculares Usando Redes Neuronales ArtificialesDokument5 SeitenReconocimiento de Placas Vehiculares Usando Redes Neuronales ArtificialesErikaMaldonadoPinedaNoch keine Bewertungen
- T E S I S: Detecci On de Objetos Usando C Amaras y Sensores LidarDokument91 SeitenT E S I S: Detecci On de Objetos Usando C Amaras y Sensores LidarScarllet Osuna TostadoNoch keine Bewertungen
- Articulo HuaroteDokument6 SeitenArticulo HuaroteraulhuaroteNoch keine Bewertungen
- Capitulo 11 Administracion Del ConocimientoDokument10 SeitenCapitulo 11 Administracion Del ConocimientoIvan BadilloNoch keine Bewertungen
- Examen Final 2021-IIDokument3 SeitenExamen Final 2021-IISergio Mendoza PérezNoch keine Bewertungen
- Tema04-Modelos de Prediccion-Parte II Regresión-2015-16Dokument36 SeitenTema04-Modelos de Prediccion-Parte II Regresión-2015-16karen dejoNoch keine Bewertungen
- Metodos Matematicos para La Mineria de DDokument36 SeitenMetodos Matematicos para La Mineria de Ddaedae2001Noch keine Bewertungen
- Taller de Inteligencia ArtificialDokument6 SeitenTaller de Inteligencia ArtificialCRISTIAN PACHECONoch keine Bewertungen
- Teorias Cognitivas Del Aprendizaje CompletoDokument93 SeitenTeorias Cognitivas Del Aprendizaje Completokuniko alvaNoch keine Bewertungen
- TopicosavanzadoDokument13 SeitenTopicosavanzadoHarlem LeonNoch keine Bewertungen
- Exposicion InteligenciaDokument30 SeitenExposicion Inteligenciaana barbosaNoch keine Bewertungen
- ks123 1.23MB CompactaDokument31 Seitenks123 1.23MB CompactaABRAHAMNoch keine Bewertungen
- Borrador DeilaDokument92 SeitenBorrador Deilaanon-258634Noch keine Bewertungen
- ControlDokument7 SeitenControlDanielNoch keine Bewertungen
- Arias Luis Fallas Dirección Asistida Eléctrica Automóviles PDFDokument111 SeitenArias Luis Fallas Dirección Asistida Eléctrica Automóviles PDFomar ceballosNoch keine Bewertungen
- SESION 4to 2022Dokument12 SeitenSESION 4to 2022Reyna Tello TraverzoNoch keine Bewertungen
- Wilfredo ProyectoDokument14 SeitenWilfredo ProyectoDiego Ismael Mamani PadillaNoch keine Bewertungen
- Documento CompletoDokument125 SeitenDocumento CompletoJose LuisNoch keine Bewertungen