Das könnte Ihnen auch gefallen
- Linear Regression Analysis: Module - IvDokument10 SeitenLinear Regression Analysis: Module - IvupenderNoch keine Bewertungen
- Applications of Linear Models in Animal Breeding Henderson-1984Dokument385 SeitenApplications of Linear Models in Animal Breeding Henderson-1984DiegoPagungAmbrosiniNoch keine Bewertungen
- Stat 473-573 NotesDokument139 SeitenStat 473-573 NotesArkadiusz Michael BarNoch keine Bewertungen
- Basic Regression AnalysisDokument5 SeitenBasic Regression AnalysisAnantha VijayanNoch keine Bewertungen
- Chapter 4Dokument68 SeitenChapter 4Nhatty WeroNoch keine Bewertungen
- Generalized Estimating Equations (Gees)Dokument40 SeitenGeneralized Estimating Equations (Gees)r4adenNoch keine Bewertungen
- Analysis of Variance (ANOVA)Dokument9 SeitenAnalysis of Variance (ANOVA)americus_smile7474Noch keine Bewertungen
- On The Best Fit of A Line To Uncertain Observation Pairs: Home Search Collections Journals About Contact Us My IopscienceDokument8 SeitenOn The Best Fit of A Line To Uncertain Observation Pairs: Home Search Collections Journals About Contact Us My Iopsciencenauji_kNoch keine Bewertungen
- Chapter 6Dokument5 SeitenChapter 6Nermine LimemeNoch keine Bewertungen
- GLS Panel DataDokument21 SeitenGLS Panel DatanovicasupicnsNoch keine Bewertungen
- Multiple Imputation of Predictor Variables Using Generalized Additive ModelsDokument27 SeitenMultiple Imputation of Predictor Variables Using Generalized Additive ModelseduardoNoch keine Bewertungen
- Book Mixed Model HendersonDokument384 SeitenBook Mixed Model HendersonHoracio Miranda VargasNoch keine Bewertungen
- Chapter4 Regression ModelAdequacyCheckingDokument38 SeitenChapter4 Regression ModelAdequacyCheckingAishat OmotolaNoch keine Bewertungen
- Estimation For Multivariate Linear Mixed ModelsDokument7 SeitenEstimation For Multivariate Linear Mixed Modelsilkom12Noch keine Bewertungen
- An Alternative Approach To AIC and Mallow's CP Statistics Based Relative Influence Measure (RIMs) in Regression Variable SelectionDokument6 SeitenAn Alternative Approach To AIC and Mallow's CP Statistics Based Relative Influence Measure (RIMs) in Regression Variable SelectionObulezi OJNoch keine Bewertungen
- Computational Economics Bayesian Analysis of The Stochastic Switching Regression Model Using Markov Chain Monte Carlo MethodsDokument20 SeitenComputational Economics Bayesian Analysis of The Stochastic Switching Regression Model Using Markov Chain Monte Carlo MethodsRubenNoch keine Bewertungen
- Chapter 6: How To Do Forecasting by Regression AnalysisDokument7 SeitenChapter 6: How To Do Forecasting by Regression AnalysisSarah Sally SarahNoch keine Bewertungen
- GMM 2Dokument30 SeitenGMM 2amubineNoch keine Bewertungen
- Regresia Multipla (1) - Modelare, Interpretare Si TestareDokument10 SeitenRegresia Multipla (1) - Modelare, Interpretare Si TestareDelia RaduNoch keine Bewertungen
- Regression AnalysisDokument12 SeitenRegression Analysispravesh1987Noch keine Bewertungen
- Lesson 2: Multiple Linear Regression Model (I) : E L F V A L U A T I O N X E R C I S E SDokument14 SeitenLesson 2: Multiple Linear Regression Model (I) : E L F V A L U A T I O N X E R C I S E SMauricio Ortiz OsorioNoch keine Bewertungen
- Asymmetric Statistical Error Analysis BarlowDokument14 SeitenAsymmetric Statistical Error Analysis BarlowTEJHAS KAPOORNoch keine Bewertungen
- Review of Multiple Regression: Assumptions About Prior Knowledge. This Handout Attempts To Summarize and SynthesizeDokument12 SeitenReview of Multiple Regression: Assumptions About Prior Knowledge. This Handout Attempts To Summarize and SynthesizeKiran PoudelNoch keine Bewertungen
- Multiple Linear Regression in Data MiningDokument14 SeitenMultiple Linear Regression in Data Miningakirank1100% (1)
- Econometrics PracticalDokument13 SeitenEconometrics Practicalakashit21a854Noch keine Bewertungen
- Regression and Multiple Regression AnalysisDokument21 SeitenRegression and Multiple Regression AnalysisRaghu NayakNoch keine Bewertungen
- Estimation in A Multivariate Errors in Variables Regression Model (Large Sample Results)Dokument22 SeitenEstimation in A Multivariate Errors in Variables Regression Model (Large Sample Results)ainNoch keine Bewertungen
- Errors in Variables in Simultaneous Equation ModelsDokument13 SeitenErrors in Variables in Simultaneous Equation Modelsjuan carlos molano toroNoch keine Bewertungen
- A Data Set That Consists of Observations On A Variable or Several Variables Over Time Is CalledDokument10 SeitenA Data Set That Consists of Observations On A Variable or Several Variables Over Time Is CalledIRENE RVNoch keine Bewertungen
- Assumption Checking On Linear RegressionDokument65 SeitenAssumption Checking On Linear RegressionJohn San JuanNoch keine Bewertungen
- Ordinary Least Squares: Linear ModelDokument13 SeitenOrdinary Least Squares: Linear ModelNanang ArifinNoch keine Bewertungen
- Multi CollinearityDokument11 SeitenMulti CollinearityCharuJagwaniNoch keine Bewertungen
- Eco 401 Econometrics: SI 2021, Week 8, 2 November 2021Dokument43 SeitenEco 401 Econometrics: SI 2021, Week 8, 2 November 2021Jerry maNoch keine Bewertungen
- On The Three-Parameter Weibull Distribution Shape Parameter EstimationDokument12 SeitenOn The Three-Parameter Weibull Distribution Shape Parameter EstimationCarlos De la OssaNoch keine Bewertungen
- CH 4 Multiple Regression ModelsDokument28 SeitenCH 4 Multiple Regression Modelspkj009Noch keine Bewertungen
- Violations of OLSDokument64 SeitenViolations of OLSOisín Ó CionaoithNoch keine Bewertungen
- A Mathematical Model Analysis PDFDokument13 SeitenA Mathematical Model Analysis PDFaadit jainNoch keine Bewertungen
- Jep 15 4 87Dokument26 SeitenJep 15 4 87Frann AraNoch keine Bewertungen
- Applications of Generalized Method of Moments Estimation: Jeffrey M. WooldridgeDokument14 SeitenApplications of Generalized Method of Moments Estimation: Jeffrey M. WooldridgeLuca SomigliNoch keine Bewertungen
- 2 Simple Regression Model 29x09x2011Dokument35 Seiten2 Simple Regression Model 29x09x2011papogoNoch keine Bewertungen
- Ols 2Dokument19 SeitenOls 2sanamdadNoch keine Bewertungen
- FM Project REPORT - Group3Dokument24 SeitenFM Project REPORT - Group3Jagmohan SainiNoch keine Bewertungen
- Forecasting Techniques: Quantitative Techniques in ManagementDokument25 SeitenForecasting Techniques: Quantitative Techniques in ManagementvishalNoch keine Bewertungen
- Stochastic Simulation and Power Analysis: ©2006 Ben Bolker August 3, 2007Dokument25 SeitenStochastic Simulation and Power Analysis: ©2006 Ben Bolker August 3, 2007juntujuntuNoch keine Bewertungen
- Chapter Two: Bivariate Regression ModeDokument54 SeitenChapter Two: Bivariate Regression ModenahomNoch keine Bewertungen
- Ordinary Least SquaresDokument21 SeitenOrdinary Least SquaresRahulsinghooooNoch keine Bewertungen
- Flex MG ArchDokument44 SeitenFlex MG ArchsdfasdfkksfjNoch keine Bewertungen
- Two-Stage Least Squares (2SLS) and Structural Equation Models (SEM) by Eddie Oczkowski May 2003Dokument14 SeitenTwo-Stage Least Squares (2SLS) and Structural Equation Models (SEM) by Eddie Oczkowski May 2003kakkrasNoch keine Bewertungen
- Generalized Methods of Moments (GMM) Estimation With PDFDokument30 SeitenGeneralized Methods of Moments (GMM) Estimation With PDFraghidkNoch keine Bewertungen
- Emet2007 NotesDokument6 SeitenEmet2007 NoteskowletNoch keine Bewertungen
- 03 ES Regression CorrelationDokument14 Seiten03 ES Regression CorrelationMuhammad AbdullahNoch keine Bewertungen
- ArunRangrejDokument5 SeitenArunRangrejArun RangrejNoch keine Bewertungen
- Readings For Lecture 5,: S S N N S NDokument16 SeitenReadings For Lecture 5,: S S N N S NSara BayedNoch keine Bewertungen
- Henderson 1984 PDFDokument384 SeitenHenderson 1984 PDFdanimiqueeNoch keine Bewertungen
- A Stepwise Approach For High-Dimensional Gaussian Graphical ModelsDokument27 SeitenA Stepwise Approach For High-Dimensional Gaussian Graphical ModelsivanmarceNoch keine Bewertungen
- Direct Linear Transformation: Practical Applications and Techniques in Computer VisionVon EverandDirect Linear Transformation: Practical Applications and Techniques in Computer VisionNoch keine Bewertungen
- Stable Numerical Schemes for Fluids, Structures and their InteractionsVon EverandStable Numerical Schemes for Fluids, Structures and their InteractionsNoch keine Bewertungen
- Cabral Et Al., 2017Dokument11 SeitenCabral Et Al., 2017Edjane FreitasNoch keine Bewertungen
- Rocha Et Al., 2018Dokument8 SeitenRocha Et Al., 2018Edjane FreitasNoch keine Bewertungen
- Teodoro Et Al., 2017 PDFDokument8 SeitenTeodoro Et Al., 2017 PDFEdjane FreitasNoch keine Bewertungen
- Principles and Utilization of Combining Ability in PDFDokument25 SeitenPrinciples and Utilization of Combining Ability in PDFEdjane FreitasNoch keine Bewertungen
- Combining Ability For Yield and Quality in Sugarcane: S.Alarmelu, G.Hemaprabha, R.Nagarajan and R. M..ShanthiDokument5 SeitenCombining Ability For Yield and Quality in Sugarcane: S.Alarmelu, G.Hemaprabha, R.Nagarajan and R. M..ShanthiEdjane FreitasNoch keine Bewertungen
- Mohamed 2017Dokument12 SeitenMohamed 2017Edjane FreitasNoch keine Bewertungen
- Fasahat Et Al., 2016Dokument25 SeitenFasahat Et Al., 2016Edjane FreitasNoch keine Bewertungen
- Best Linear Unbiased Prediction of Genomic Breeding PDFDokument8 SeitenBest Linear Unbiased Prediction of Genomic Breeding PDFEdjane FreitasNoch keine Bewertungen
- Gravina Et Al.,2004 PDFDokument5 SeitenGravina Et Al.,2004 PDFEdjane FreitasNoch keine Bewertungen
- Genetic Diversity in Sugarcane (Saccharum Spp. Complex) : PP Patil, SS Patil and DU PatelDokument4 SeitenGenetic Diversity in Sugarcane (Saccharum Spp. Complex) : PP Patil, SS Patil and DU PatelEdjane FreitasNoch keine Bewertungen
- Lecture Notes On Linkage Analysis: Piet StamDokument16 SeitenLecture Notes On Linkage Analysis: Piet StamEdjane FreitasNoch keine Bewertungen
- Briefings in Functional Genomics 2010 Jannink 166 77Dokument12 SeitenBriefings in Functional Genomics 2010 Jannink 166 77Edjane FreitasNoch keine Bewertungen
- I I I I: Peroxid.Q!Dokument2 SeitenI I I I: Peroxid.Q!Diego PradelNoch keine Bewertungen
- Odisha State Museum-1Dokument26 SeitenOdisha State Museum-1ajitkpatnaikNoch keine Bewertungen
- Sankranthi PDFDokument39 SeitenSankranthi PDFMaruthiNoch keine Bewertungen
- BIAN How To Guide Developing Content V7.0 Final V1.0 PDFDokument72 SeitenBIAN How To Guide Developing Content V7.0 Final V1.0 PDFميلاد نوروزي رهبرNoch keine Bewertungen
- Chapter 2Dokument8 SeitenChapter 2Fahmia MidtimbangNoch keine Bewertungen
- Contoh Discussion Text Tentang HomeworkDokument8 SeitenContoh Discussion Text Tentang Homeworkg3p35rs6100% (1)
- FinalDokument18 SeitenFinalAkash LadNoch keine Bewertungen
- NABARD R&D Seminar FormatDokument7 SeitenNABARD R&D Seminar FormatAnupam G. RatheeNoch keine Bewertungen
- Maritta Koch-Weser, Scott Guggenheim - Social Development in The World Bank - Essays in Honor of Michael M. Cernea-Springer (2021)Dokument374 SeitenMaritta Koch-Weser, Scott Guggenheim - Social Development in The World Bank - Essays in Honor of Michael M. Cernea-Springer (2021)IacobNoch keine Bewertungen
- Data Sheet Eldar Void SpinnerDokument1 SeiteData Sheet Eldar Void SpinnerAlex PolleyNoch keine Bewertungen
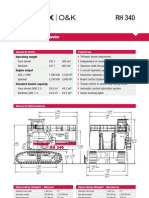
- Hydraulic Mining ExcavatorDokument8 SeitenHydraulic Mining Excavatorasditia_07100% (1)
- in 30 MinutesDokument5 Seitenin 30 MinutesCésar DiazNoch keine Bewertungen
- Notes On Antibodies PropertiesDokument3 SeitenNotes On Antibodies PropertiesBidur Acharya100% (1)
- When A Snobbish Gangster Meets A Pervert CassanovaDokument62 SeitenWhen A Snobbish Gangster Meets A Pervert CassanovaMaria Shiela Mae Baratas100% (1)
- TESTDokument27 SeitenTESTLegal CheekNoch keine Bewertungen
- Introduction To Retail LoansDokument2 SeitenIntroduction To Retail LoansSameer ShahNoch keine Bewertungen
- DMIT - Midbrain - DMIT SoftwareDokument16 SeitenDMIT - Midbrain - DMIT SoftwarevinNoch keine Bewertungen
- WHO Guidelines For Drinking Water: Parameters Standard Limits As Per WHO Guidelines (MG/L)Dokument3 SeitenWHO Guidelines For Drinking Water: Parameters Standard Limits As Per WHO Guidelines (MG/L)114912Noch keine Bewertungen
- CS8CHP EletricalDokument52 SeitenCS8CHP EletricalCristian ricardo russoNoch keine Bewertungen
- HFE0106 TraskPart2Dokument5 SeitenHFE0106 TraskPart2arunkr1Noch keine Bewertungen
- 5 Minute Pediatric ConsultDokument5 Seiten5 Minute Pediatric Consultajescool0% (4)
- Faa Data On B 777 PDFDokument104 SeitenFaa Data On B 777 PDFGurudutt PaiNoch keine Bewertungen
- User Manual PM3250Dokument80 SeitenUser Manual PM3250otavioalcaldeNoch keine Bewertungen
- ADC of PIC MicrocontrollerDokument4 SeitenADC of PIC Microcontrollerkillbill100% (2)
- Civ Beyond Earth HotkeysDokument1 SeiteCiv Beyond Earth HotkeysExirtisNoch keine Bewertungen
- What Is Universe?Dokument19 SeitenWhat Is Universe?Ruben M. VerdidaNoch keine Bewertungen
- Pipe Cleaner Lesson PlanDokument2 SeitenPipe Cleaner Lesson PlanTaylor FranklinNoch keine Bewertungen
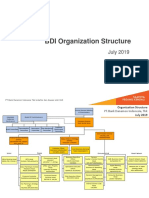
- Bank Danamon Organization ChartDokument4 SeitenBank Danamon Organization ChartFaisal Agus NugrahaNoch keine Bewertungen
- Basic Econometrics Questions and AnswersDokument3 SeitenBasic Econometrics Questions and AnswersRutendo TarabukuNoch keine Bewertungen
- Formula:: High Low Method (High - Low) Break-Even PointDokument24 SeitenFormula:: High Low Method (High - Low) Break-Even PointRedgie Mark UrsalNoch keine Bewertungen