Das könnte Ihnen auch gefallen
- Name Address Phone Email: Research InterestsDokument6 SeitenName Address Phone Email: Research Interestsavi0341Noch keine Bewertungen
- Advanced Control Design with Application to Electromechanical SystemsVon EverandAdvanced Control Design with Application to Electromechanical SystemsBewertung: 5 von 5 Sternen5/5 (1)
- PHD Tech ResumeDokument6 SeitenPHD Tech ResumeShantanu ShuklaNoch keine Bewertungen
- Reliability Theory and ModelsVon EverandReliability Theory and ModelsMohamed Abdel-HameedNoch keine Bewertungen
- Ma Short Bio 2006Dokument1 SeiteMa Short Bio 2006Richard ParralesNoch keine Bewertungen
- Power System Small Signal Stability Analysis and ControlVon EverandPower System Small Signal Stability Analysis and ControlBewertung: 5 von 5 Sternen5/5 (2)
- Kucera 05Dokument2 SeitenKucera 05Saradhi ThotaNoch keine Bewertungen
- CVDokument5 SeitenCVTajwar HoqueNoch keine Bewertungen
- Vishwani D. Agrawal: Career ObjectiveDokument34 SeitenVishwani D. Agrawal: Career ObjectiveArman AliNoch keine Bewertungen
- 【Haug-1984】Computer Aided Analysis and Optimization of Mechanical System Dynamics PDFDokument718 Seiten【Haug-1984】Computer Aided Analysis and Optimization of Mechanical System Dynamics PDFAlfoilNoch keine Bewertungen
- Zhong Smart GridDokument3 SeitenZhong Smart GridmmrNoch keine Bewertungen
- ReferencesDokument4 SeitenReferencessaadeng2004Noch keine Bewertungen
- M.SC - in Electrical and Comp Control EngDokument36 SeitenM.SC - in Electrical and Comp Control EngIslam FattouhNoch keine Bewertungen
- RWilliams CVDokument3 SeitenRWilliams CVMallikarjun TalwarNoch keine Bewertungen
- Anurag Abstract BioDokument1 SeiteAnurag Abstract BioSudha MalikNoch keine Bewertungen
- CV VijaysoodDokument9 SeitenCV VijaysoodPatrick Bernard BanzemwaboNoch keine Bewertungen
- Mangharam-Highlights 2014Dokument3 SeitenMangharam-Highlights 2014Rizwan MukatiNoch keine Bewertungen
- Non-Fragile Observer-Based Passive Control For Discrete-Time Systems With Repeated Scalar Non-LinearitiesDokument18 SeitenNon-Fragile Observer-Based Passive Control For Discrete-Time Systems With Repeated Scalar Non-Linearitiesbalraj dNoch keine Bewertungen
- 0628-1 Course MinhCTaDokument1 Seite0628-1 Course MinhCTaRaveendhra IitrNoch keine Bewertungen
- 1 s2.0 0167849387900532 MainDokument10 Seiten1 s2.0 0167849387900532 Mainkurts010Noch keine Bewertungen
- S-24 Pserc Final Report Var Resources 2008Dokument502 SeitenS-24 Pserc Final Report Var Resources 2008fernando tipanNoch keine Bewertungen
- CVDokument21 SeitenCVNaman BhayaniNoch keine Bewertungen
- Sample Selected Publication Lecturer ApplDokument59 SeitenSample Selected Publication Lecturer ApplCATHERINENoch keine Bewertungen
- RESUME of Charles F. Henville Date of Birth: 11, May, 1948 Nationality: CanadianDokument4 SeitenRESUME of Charles F. Henville Date of Birth: 11, May, 1948 Nationality: CanadianGilvan Vieira de Andrade JúniorNoch keine Bewertungen
- VitDokument30 SeitenVitVinoth RajaNoch keine Bewertungen
- TH Lee Sep2009Dokument1 SeiteTH Lee Sep2009sujingthetNoch keine Bewertungen
- Kkbil4-2010 Lampiran A Kertas Kerja Sistem KawalanDokument3 SeitenKkbil4-2010 Lampiran A Kertas Kerja Sistem KawalanHairul Effendy Ab MaulodNoch keine Bewertungen
- Abhaya PHDDokument4 SeitenAbhaya PHDAbhayaNoch keine Bewertungen
- Edward L Wilson - BioDokument7 SeitenEdward L Wilson - BioAlirio Rafael Martinez MartinezNoch keine Bewertungen
- Mithun Singla Resume EE PHDDokument2 SeitenMithun Singla Resume EE PHDMithun SinglaNoch keine Bewertungen
- Editorial: New Trends in Nonlinear Control Systems and ApplicationsDokument3 SeitenEditorial: New Trends in Nonlinear Control Systems and ApplicationsJonny MejiaNoch keine Bewertungen
- Engineering ReliabilityDokument221 SeitenEngineering Reliabilityjapele100% (17)
- Power System Modeling, Analysis and Control: A. P. Sakis Meliopoulos Professor Georgia Institute of TechnologyDokument30 SeitenPower System Modeling, Analysis and Control: A. P. Sakis Meliopoulos Professor Georgia Institute of TechnologyMuruganNoch keine Bewertungen
- Workshop Speakers Bio Datav2Dokument6 SeitenWorkshop Speakers Bio Datav2dkaushiksondurNoch keine Bewertungen
- L578 Notebook PDFDokument608 SeitenL578 Notebook PDFCarlos OspinaNoch keine Bewertungen
- CHAPTER 1 TheoremDokument20 SeitenCHAPTER 1 Theoremhahoang33322Noch keine Bewertungen
- Power System Stability and ControlDokument4 SeitenPower System Stability and Controlprasanna1990Noch keine Bewertungen
- 1 s2.0 0005109896855464 MainDokument20 Seiten1 s2.0 0005109896855464 MainFrancisco FloresNoch keine Bewertungen
- EECS 414 Sample SylDokument6 SeitenEECS 414 Sample SyldemetriusNoch keine Bewertungen
- Benjamin Waters CVDokument4 SeitenBenjamin Waters CVbhw2114Noch keine Bewertungen
- Adaptive Control TutorialDokument403 SeitenAdaptive Control Tutorialm2kam21100% (1)
- Taylor T. Johnson: EducationDokument7 SeitenTaylor T. Johnson: EducationdewufhweuihNoch keine Bewertungen
- Jnreddy ResumeDokument100 SeitenJnreddy Resumeprk74Noch keine Bewertungen
- 11 Example of References Using The Numeric SystemDokument2 Seiten11 Example of References Using The Numeric SystemHepisipa MatekitongaNoch keine Bewertungen
- GA and PSODokument2 SeitenGA and PSOKệ ThôiNoch keine Bewertungen
- KahncvDokument6 SeitenKahncvapi-282460606Noch keine Bewertungen
- R00013-Fuzzy Neural-Cast 1Dokument70 SeitenR00013-Fuzzy Neural-Cast 1Roxana BoicuNoch keine Bewertungen
- SYSC 3610 CourseDescription 04 2020 - 2Dokument4 SeitenSYSC 3610 CourseDescription 04 2020 - 2Ashraf maghNoch keine Bewertungen
- 2015 SMO Volpi - EtalDokument23 Seiten2015 SMO Volpi - Etalanh.buisnow2001Noch keine Bewertungen
- BoseDokument7 SeitenBosePradeep Kumar YadavNoch keine Bewertungen
- Arman Dabiri ResumeDokument3 SeitenArman Dabiri ResumeArman DabiriNoch keine Bewertungen
- TCD cv9 01Dokument10 SeitenTCD cv9 01api-280066519Noch keine Bewertungen
- or... Hich - EE - Ruchi Choudhary PDFDokument2 Seitenor... Hich - EE - Ruchi Choudhary PDFAnurag PrabhakarNoch keine Bewertungen
- A Short Resume of One of The Famous Iranian Professor in The USA .Dokument39 SeitenA Short Resume of One of The Famous Iranian Professor in The USA .yusef_behdariNoch keine Bewertungen
- Lecture 1Dokument33 SeitenLecture 1sandeepbabu28Noch keine Bewertungen
- IntroductionDokument3 SeitenIntroductionMoch Raka RizkiNoch keine Bewertungen
- Singular Perturbation Methods in Control Analysis and Design Classics in Applied MathematicsDokument388 SeitenSingular Perturbation Methods in Control Analysis and Design Classics in Applied MathematicsTran Trung Thanh100% (2)
- 1441957561Dokument356 Seiten1441957561Guilherme Augusto CecatoNoch keine Bewertungen
- Adaptive MonopoliDokument11 SeitenAdaptive MonopoliShadNoch keine Bewertungen
- CV Reema ShourDokument3 SeitenCV Reema ShourTanveerNoch keine Bewertungen
- R Hmad RAZ: Ersonal NformationDokument3 SeitenR Hmad RAZ: Ersonal NformationTanveerNoch keine Bewertungen
- Prof. Dr. Ansar-Ul-Haque Yasar: EducationDokument4 SeitenProf. Dr. Ansar-Ul-Haque Yasar: EducationTanveerNoch keine Bewertungen
- Laraib Sarfraz Khanzada: MUET, Jamshoro. Lab Lecturer Assistant ManagerDokument3 SeitenLaraib Sarfraz Khanzada: MUET, Jamshoro. Lab Lecturer Assistant ManagerTanveerNoch keine Bewertungen
- S. Jangbar 2013Dokument3 SeitenS. Jangbar 2013TanveerNoch keine Bewertungen
- SDSC MujtabaBaqarDokument11 SeitenSDSC MujtabaBaqarTanveerNoch keine Bewertungen
- Dr. Muhammad Shakil Ahmad: VisionDokument8 SeitenDr. Muhammad Shakil Ahmad: VisionTanveerNoch keine Bewertungen
- Ghulam Mustafa: ProfileDokument3 SeitenGhulam Mustafa: ProfileTanveerNoch keine Bewertungen
- Curriculum Vitae: QualificationDokument4 SeitenCurriculum Vitae: QualificationTanveerNoch keine Bewertungen
- C C C C: Academic Qualifications: Academic Qualifications: Academic Qualifications: Academic QualificationsDokument2 SeitenC C C C: Academic Qualifications: Academic Qualifications: Academic Qualifications: Academic QualificationsTanveerNoch keine Bewertungen
- Ghulam Mustafa (PHD) : Education PHD, Computer Science and TechnologyDokument2 SeitenGhulam Mustafa (PHD) : Education PHD, Computer Science and TechnologyTanveerNoch keine Bewertungen
- Jan R. Wessel, PH.DDokument9 SeitenJan R. Wessel, PH.DTanveerNoch keine Bewertungen
- 39021Dokument4 Seiten39021Jack DawsonNoch keine Bewertungen
- Curriculum Vitae: Majid LiaquatDokument3 SeitenCurriculum Vitae: Majid LiaquatTanveerNoch keine Bewertungen
- Muhammad Rashid Usman, PHDDokument9 SeitenMuhammad Rashid Usman, PHDTanveerNoch keine Bewertungen
- A Brief Resume of Mujahid Abbas: NameDokument3 SeitenA Brief Resume of Mujahid Abbas: NameTanveerNoch keine Bewertungen
- Muhammad Rizwan: Name: Designation: Email: TEL NO. (OFF.) : Academic QualificationDokument1 SeiteMuhammad Rizwan: Name: Designation: Email: TEL NO. (OFF.) : Academic QualificationTanveerNoch keine Bewertungen
- Fazal Ur RahmanDokument3 SeitenFazal Ur RahmanTanveerNoch keine Bewertungen
- Fazal Husain: Brief IntroductionDokument6 SeitenFazal Husain: Brief IntroductionTanveerNoch keine Bewertungen
- Fazal I HaqDokument3 SeitenFazal I HaqTanveerNoch keine Bewertungen
- Advt No 36 2019Dokument2 SeitenAdvt No 36 2019Afrasayab QaiserNoch keine Bewertungen
- 2014 Examination 2014 VCE VET Laboratory Skills: GA 2 Examination General CommentsDokument10 Seiten2014 Examination 2014 VCE VET Laboratory Skills: GA 2 Examination General CommentsTanveerNoch keine Bewertungen
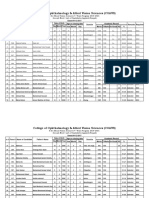
- College of Ophthalmology & Allied Vision Sciences (COAVS)Dokument2 SeitenCollege of Ophthalmology & Allied Vision Sciences (COAVS)TanveerNoch keine Bewertungen
- Curriculum Vitae D - F H: R Azal ADIDokument10 SeitenCurriculum Vitae D - F H: R Azal ADITanveerNoch keine Bewertungen
- Muhammad Usman:: Amir Ahmed SheikhDokument1 SeiteMuhammad Usman:: Amir Ahmed SheikhTanveerNoch keine Bewertungen
- AN Ietenbeck: Academic EmploymentDokument3 SeitenAN Ietenbeck: Academic EmploymentTanveerNoch keine Bewertungen
- Curriculum Vitae of Jan Willem GunningDokument6 SeitenCurriculum Vitae of Jan Willem GunningTanveerNoch keine Bewertungen
- Can Test 1001Dokument430 SeitenCan Test 1001Alaa DaoudNoch keine Bewertungen
- Curriculum Vitae: Arabidopsis ThalianaDokument2 SeitenCurriculum Vitae: Arabidopsis ThalianaTanveerNoch keine Bewertungen
- Jan Werner February 2019Dokument7 SeitenJan Werner February 2019TanveerNoch keine Bewertungen
- Proposal Kerja PraktekDokument11 SeitenProposal Kerja PraktekBilly Dentiala Irvan100% (1)
- French DELF A1 Exam PDFDokument10 SeitenFrench DELF A1 Exam PDFMishtiNoch keine Bewertungen
- 9-12 Lesson PlanDokument3 Seiten9-12 Lesson Planapi-364700795Noch keine Bewertungen
- Gender Portrayals and Stereotypes in Kabit-Themed Shows:a Content AnalysisDokument11 SeitenGender Portrayals and Stereotypes in Kabit-Themed Shows:a Content AnalysisRichard Webb100% (2)
- Design of Power Converters For Renewable Energy Sources and Electric Vehicles ChargingDokument6 SeitenDesign of Power Converters For Renewable Energy Sources and Electric Vehicles ChargingRay Aavanged IINoch keine Bewertungen
- OM Version 1Dokument497 SeitenOM Version 1Sushant SinghNoch keine Bewertungen
- Ifrs SapDokument6 SeitenIfrs Sapravikb01Noch keine Bewertungen
- Jurnal Internasional Tentang ScabiesDokument9 SeitenJurnal Internasional Tentang ScabiesGalyNoch keine Bewertungen
- Explosives Sazfety Seminar 1992 AD A261116Dokument634 SeitenExplosives Sazfety Seminar 1992 AD A261116lpayne100% (1)
- Organisational B.Dokument62 SeitenOrganisational B.Viktoria MolnarNoch keine Bewertungen
- Poznan University Brochure 04-05 KwalifikacjeDokument2 SeitenPoznan University Brochure 04-05 KwalifikacjeRiaz CarzNoch keine Bewertungen
- 432 HZ - Unearthing The Truth Behind Nature's FrequencyDokument6 Seiten432 HZ - Unearthing The Truth Behind Nature's FrequencyShiv KeskarNoch keine Bewertungen
- ESL BOOKS - IELTS Academic Writing Task 1 Vocabulary by ESL Fluency - PreviewDokument7 SeitenESL BOOKS - IELTS Academic Writing Task 1 Vocabulary by ESL Fluency - Previewanirudh modhalavalasaNoch keine Bewertungen
- UPSC Paper 4 Binder PDFDokument17 SeitenUPSC Paper 4 Binder PDFHsis AbedNoch keine Bewertungen
- Tables Log ActivatedDokument575 SeitenTables Log ActivateddcdiasNoch keine Bewertungen
- Flow Diagram: Equipment Identification Numbering SystemDokument24 SeitenFlow Diagram: Equipment Identification Numbering Systemmkpq100% (1)
- Oas Community College-EapDokument2 SeitenOas Community College-EapMerida BravoNoch keine Bewertungen
- Sample MidtermDokument7 SeitenSample MidtermMuhammad WasifNoch keine Bewertungen
- Tga Kinetic ValueseDokument3 SeitenTga Kinetic ValueseCarlos ChavezNoch keine Bewertungen
- Nursing 405 EfolioDokument5 SeitenNursing 405 Efolioapi-403368398100% (1)
- Assignment 4: Chitresh KumarDokument7 SeitenAssignment 4: Chitresh KumarChitreshKumarNoch keine Bewertungen
- Paranthropology Vol 3 No 3Dokument70 SeitenParanthropology Vol 3 No 3George ZafeiriouNoch keine Bewertungen
- TGC 121 505558shubham AggarwalDokument4 SeitenTGC 121 505558shubham Aggarwalshubham.aggarwalNoch keine Bewertungen
- Virtually Anywhere Lesson Plan Episodes 1 and 2Dokument6 SeitenVirtually Anywhere Lesson Plan Episodes 1 and 2Elyelson dos Santos GomesNoch keine Bewertungen
- LodhaDokument3 SeitenLodhaSohil Kisan0% (1)
- Review of Cyborg BabiesDokument3 SeitenReview of Cyborg BabiesNate GreenslitNoch keine Bewertungen
- 2011bibliography Part I (Preparation and Initial Assessment)Dokument188 Seiten2011bibliography Part I (Preparation and Initial Assessment)Espiritu MineralNoch keine Bewertungen
- Solar Water Pump Supreme RevDokument22 SeitenSolar Water Pump Supreme RevBelayneh TadesseNoch keine Bewertungen
- Performance Management System: Business Essentials Business Accelerators Business ValuesDokument10 SeitenPerformance Management System: Business Essentials Business Accelerators Business ValuesVishwa Mohan PandeyNoch keine Bewertungen
- Making Things: The Essence and Evolution of The Toyota Production SystemDokument2 SeitenMaking Things: The Essence and Evolution of The Toyota Production Systemkt44974085Noch keine Bewertungen
- ADHD is Awesome: A Guide to (Mostly) Thriving with ADHDVon EverandADHD is Awesome: A Guide to (Mostly) Thriving with ADHDBewertung: 5 von 5 Sternen5/5 (1)
- The Age of Magical Overthinking: Notes on Modern IrrationalityVon EverandThe Age of Magical Overthinking: Notes on Modern IrrationalityBewertung: 4 von 5 Sternen4/5 (24)
- Think This, Not That: 12 Mindshifts to Breakthrough Limiting Beliefs and Become Who You Were Born to BeVon EverandThink This, Not That: 12 Mindshifts to Breakthrough Limiting Beliefs and Become Who You Were Born to BeBewertung: 2 von 5 Sternen2/5 (1)
- Summary: The Psychology of Money: Timeless Lessons on Wealth, Greed, and Happiness by Morgan Housel: Key Takeaways, Summary & Analysis IncludedVon EverandSummary: The Psychology of Money: Timeless Lessons on Wealth, Greed, and Happiness by Morgan Housel: Key Takeaways, Summary & Analysis IncludedBewertung: 5 von 5 Sternen5/5 (80)
- Raising Mentally Strong Kids: How to Combine the Power of Neuroscience with Love and Logic to Grow Confident, Kind, Responsible, and Resilient Children and Young AdultsVon EverandRaising Mentally Strong Kids: How to Combine the Power of Neuroscience with Love and Logic to Grow Confident, Kind, Responsible, and Resilient Children and Young AdultsBewertung: 5 von 5 Sternen5/5 (1)
- The Ritual Effect: From Habit to Ritual, Harness the Surprising Power of Everyday ActionsVon EverandThe Ritual Effect: From Habit to Ritual, Harness the Surprising Power of Everyday ActionsBewertung: 3.5 von 5 Sternen3.5/5 (3)
- By the Time You Read This: The Space between Cheslie's Smile and Mental Illness—Her Story in Her Own WordsVon EverandBy the Time You Read This: The Space between Cheslie's Smile and Mental Illness—Her Story in Her Own WordsNoch keine Bewertungen
- The Tennis Partner: A Doctor's Story of Friendship and LossVon EverandThe Tennis Partner: A Doctor's Story of Friendship and LossBewertung: 4.5 von 5 Sternen4.5/5 (4)
- Summary of The 48 Laws of Power: by Robert GreeneVon EverandSummary of The 48 Laws of Power: by Robert GreeneBewertung: 4.5 von 5 Sternen4.5/5 (233)
- The Marshmallow Test: Mastering Self-ControlVon EverandThe Marshmallow Test: Mastering Self-ControlBewertung: 4.5 von 5 Sternen4.5/5 (58)
- The Body Keeps the Score by Bessel Van der Kolk, M.D. - Book Summary: Brain, Mind, and Body in the Healing of TraumaVon EverandThe Body Keeps the Score by Bessel Van der Kolk, M.D. - Book Summary: Brain, Mind, and Body in the Healing of TraumaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- Cult, A Love Story: Ten Years Inside a Canadian Cult and the Subsequent Long Road of RecoveryVon EverandCult, A Love Story: Ten Years Inside a Canadian Cult and the Subsequent Long Road of RecoveryBewertung: 4 von 5 Sternen4/5 (44)
- When the Body Says No by Gabor Maté: Key Takeaways, Summary & AnalysisVon EverandWhen the Body Says No by Gabor Maté: Key Takeaways, Summary & AnalysisBewertung: 3.5 von 5 Sternen3.5/5 (2)
- Dark Psychology & Manipulation: Discover How To Analyze People and Master Human Behaviour Using Emotional Influence Techniques, Body Language Secrets, Covert NLP, Speed Reading, and Hypnosis.Von EverandDark Psychology & Manipulation: Discover How To Analyze People and Master Human Behaviour Using Emotional Influence Techniques, Body Language Secrets, Covert NLP, Speed Reading, and Hypnosis.Bewertung: 4.5 von 5 Sternen4.5/5 (110)
- The Courage Habit: How to Accept Your Fears, Release the Past, and Live Your Courageous LifeVon EverandThe Courage Habit: How to Accept Your Fears, Release the Past, and Live Your Courageous LifeBewertung: 4.5 von 5 Sternen4.5/5 (253)
- 12 Rules for Life by Jordan B. Peterson - Book Summary: An Antidote to ChaosVon Everand12 Rules for Life by Jordan B. Peterson - Book Summary: An Antidote to ChaosBewertung: 4.5 von 5 Sternen4.5/5 (207)
- Self-Care for Autistic People: 100+ Ways to Recharge, De-Stress, and Unmask!Von EverandSelf-Care for Autistic People: 100+ Ways to Recharge, De-Stress, and Unmask!Bewertung: 5 von 5 Sternen5/5 (1)
- Codependent No More: How to Stop Controlling Others and Start Caring for YourselfVon EverandCodependent No More: How to Stop Controlling Others and Start Caring for YourselfBewertung: 5 von 5 Sternen5/5 (88)
- Mindset by Carol S. Dweck - Book Summary: The New Psychology of SuccessVon EverandMindset by Carol S. Dweck - Book Summary: The New Psychology of SuccessBewertung: 4.5 von 5 Sternen4.5/5 (328)
- Rewire Your Anxious Brain: How to Use the Neuroscience of Fear to End Anxiety, Panic, and WorryVon EverandRewire Your Anxious Brain: How to Use the Neuroscience of Fear to End Anxiety, Panic, and WorryBewertung: 4.5 von 5 Sternen4.5/5 (157)
- Summary: How to Be an Adult in Relationships: The Five Keys to Mindful Loving by David Richo: Key Takeaways, Summary & Analysis IncludedVon EverandSummary: How to Be an Adult in Relationships: The Five Keys to Mindful Loving by David Richo: Key Takeaways, Summary & Analysis IncludedBewertung: 4 von 5 Sternen4/5 (11)
- Algorithms to Live By: The Computer Science of Human DecisionsVon EverandAlgorithms to Live By: The Computer Science of Human DecisionsBewertung: 4.5 von 5 Sternen4.5/5 (722)
- Troubled: A Memoir of Foster Care, Family, and Social ClassVon EverandTroubled: A Memoir of Foster Care, Family, and Social ClassBewertung: 4.5 von 5 Sternen4.5/5 (26)