Das könnte Ihnen auch gefallen
- R.L. Vázquez González SMF 2Dokument12 SeitenR.L. Vázquez González SMF 2Alan Vázquez GonzálezNoch keine Bewertungen
- R.L. Vázquez González SMF 1Dokument12 SeitenR.L. Vázquez González SMF 1Alan Vázquez GonzálezNoch keine Bewertungen
- Diferencias FinitasDokument25 SeitenDiferencias FinitasAlan Vázquez GonzálezNoch keine Bewertungen
- Criterios de FallasDokument10 SeitenCriterios de FallasAlan Vázquez GonzálezNoch keine Bewertungen
- Marco Conceptusal TallerDokument6 SeitenMarco Conceptusal TallerAlan Vázquez GonzálezNoch keine Bewertungen
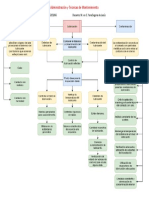
- Administración y Técnicas de Mantenimiento MPDokument2 SeitenAdministración y Técnicas de Mantenimiento MPAlan Vázquez GonzálezNoch keine Bewertungen
- Practica 4Dokument15 SeitenPractica 4Alan Vázquez GonzálezNoch keine Bewertungen
- Presentacion de CONCLUSIONESDokument6 SeitenPresentacion de CONCLUSIONESAlan Vázquez GonzálezNoch keine Bewertungen
- Marco Referencial TallerDokument6 SeitenMarco Referencial TallerAlan Vázquez GonzálezNoch keine Bewertungen
- Practica 3Dokument14 SeitenPractica 3Alan Vázquez GonzálezNoch keine Bewertungen
- Criterios de SelecciónDokument43 SeitenCriterios de SelecciónAlan Vázquez GonzálezNoch keine Bewertungen
- MAPA CONCEPTUAL DEL "Code of Ethics For Engineers"Dokument2 SeitenMAPA CONCEPTUAL DEL "Code of Ethics For Engineers"Alan Vázquez GonzálezNoch keine Bewertungen
- Mantenimiento PreventivoT1 PDFDokument1 SeiteMantenimiento PreventivoT1 PDFAlan Vázquez GonzálezNoch keine Bewertungen
- Práctica 1 - Unidad 5 - OxidaciónDokument6 SeitenPráctica 1 - Unidad 5 - OxidaciónAlan Vázquez GonzálezNoch keine Bewertungen
- LubricaciónDokument1 SeiteLubricaciónAlan Vázquez GonzálezNoch keine Bewertungen
- Mantenimiento AutónomoDokument4 SeitenMantenimiento AutónomoAlan Vázquez González0% (1)
- Mantenimiento PreventivoDokument1 SeiteMantenimiento PreventivoAlan Vázquez GonzálezNoch keine Bewertungen
- Práctica 1 - Unidad 5 - OxidaciónDokument6 SeitenPráctica 1 - Unidad 5 - OxidaciónAlan Vázquez GonzálezNoch keine Bewertungen
- Mantenimiento PreventivoT1Dokument1 SeiteMantenimiento PreventivoT1Alan Vázquez GonzálezNoch keine Bewertungen
- Reporte de Práctica 2Dokument12 SeitenReporte de Práctica 2Alan Vázquez GonzálezNoch keine Bewertungen
- Cálculo de Luminarias para La PurificadoraDokument20 SeitenCálculo de Luminarias para La PurificadoraAlan Vázquez GonzálezNoch keine Bewertungen
- Reporte de práctica sobre encendido, apagado y cambio de herramienta de una prensa CNCDokument16 SeitenReporte de práctica sobre encendido, apagado y cambio de herramienta de una prensa CNCAlan Vázquez GonzálezNoch keine Bewertungen
- Principios de Mantenimiento de Las Turbinas de VaporDokument9 SeitenPrincipios de Mantenimiento de Las Turbinas de VaporAlan Vázquez González100% (1)
- Hoja de Ruta y Hoja de ProcesosDokument17 SeitenHoja de Ruta y Hoja de ProcesosAlan Vázquez GonzálezNoch keine Bewertungen
- Baño Alzado PDFDokument1 SeiteBaño Alzado PDFAlan Vázquez GonzálezNoch keine Bewertungen
- Circuitos ElectricosDokument2 SeitenCircuitos ElectricosAlan Vázquez GonzálezNoch keine Bewertungen
- ChecklistDokument14 SeitenChecklistAlan Vázquez GonzálezNoch keine Bewertungen
- TurbinasDokument9 SeitenTurbinasAlan Vázquez GonzálezNoch keine Bewertungen
- Energizadiciembre 2011Dokument53 SeitenEnergizadiciembre 2011Martin RiosNoch keine Bewertungen
- Lupa: instrumento óptico para ampliar objetosDokument2 SeitenLupa: instrumento óptico para ampliar objetosAlan Vázquez GonzálezNoch keine Bewertungen
- CV Satab 2023Dokument21 SeitenCV Satab 2023Armando Francisco Zenteno BernatNoch keine Bewertungen
- La Virtud PacienciaDokument11 SeitenLa Virtud PacienciaOscAr HoyOsNoch keine Bewertungen
- The Secret GardenDokument2 SeitenThe Secret GardenAnonymous HxAcjKYT100% (1)
- Zimbra-Configuracion para Permitir Archivos Con ClaveDokument10 SeitenZimbra-Configuracion para Permitir Archivos Con ClaveRonald PaicoNoch keine Bewertungen
- Revision de Caso Clinico: Fascitis Necrosante en Un Perro: Universidad Autónoma Metropolitana Unidad XochimilcoDokument22 SeitenRevision de Caso Clinico: Fascitis Necrosante en Un Perro: Universidad Autónoma Metropolitana Unidad XochimilcoOmary2jNoch keine Bewertungen
- Resumen 5 FinanzasDokument4 SeitenResumen 5 Finanzaslalutrv RvNoch keine Bewertungen
- Ordinario Laboral NuevoDokument6 SeitenOrdinario Laboral NuevolibnyNoch keine Bewertungen
- Qué Se Necesita Saber para Tener Éxito en Los Hechizos para EnamorarDokument2 SeitenQué Se Necesita Saber para Tener Éxito en Los Hechizos para EnamorarhechizosNoch keine Bewertungen
- Datos Climaticos de Santiago de Los CaballerosDokument9 SeitenDatos Climaticos de Santiago de Los CaballerosRUSSNoch keine Bewertungen
- Coseriu El Llamado Lat N VulgarDokument83 SeitenCoseriu El Llamado Lat N VulgarIgnacio Andrés Pardo VásquezNoch keine Bewertungen
- Recuerdos de la infancia en BanfieldDokument14 SeitenRecuerdos de la infancia en Banfieldaylinn ramirezNoch keine Bewertungen
- Manual Recuperar Contraseña de La Plataforma EducarecuadorDokument6 SeitenManual Recuperar Contraseña de La Plataforma Educarecuadorrobertotenezaca100% (1)
- Descarga El Resumen de El ErmitanoDokument1 SeiteDescarga El Resumen de El ErmitanoNicole van WeezelNoch keine Bewertungen
- Trifolio AmhonDokument2 SeitenTrifolio Amhonfantomas1959Noch keine Bewertungen
- TAllER MUNDELL-FLEMINGDokument9 SeitenTAllER MUNDELL-FLEMINGDayanna Contento100% (1)
- 6º Personal Social - III BimestreDokument8 Seiten6º Personal Social - III Bimestreayde menendezNoch keine Bewertungen
- Monedas y Billetes de CentroaméricaDokument6 SeitenMonedas y Billetes de CentroaméricaJyr Low RoblesNoch keine Bewertungen
- Trabajo AndersonDokument19 SeitenTrabajo AndersonDiego Andres Mercado SuárezNoch keine Bewertungen
- 3 Jomi Anexos Sem 7 y 8Dokument23 Seiten3 Jomi Anexos Sem 7 y 8MAYRA DANIELA PARDO ESCOBEDONoch keine Bewertungen
- Semana 13Dokument40 SeitenSemana 13Murrieta Salvatierra RenzoNoch keine Bewertungen
- La Pasta en El HormigonDokument4 SeitenLa Pasta en El Hormigonceci salgueroNoch keine Bewertungen
- Evaluación Formativa T7Dokument11 SeitenEvaluación Formativa T7TANIA JACQUELINE RUIZ OLIVARESNoch keine Bewertungen
- Información Segunda Antología de La Poesía EspañolaDokument24 SeitenInformación Segunda Antología de La Poesía EspañolaEnric MoyaNoch keine Bewertungen
- Bases Alvaro ObregonDokument18 SeitenBases Alvaro ObregonSeea Julio CedilloNoch keine Bewertungen
- Se Pasó Un Día Entero Buscando El Calcetín Rojo: 2.-Redacta El Texto A Partir de La Planificación Que Hiciste ArribaDokument1 SeiteSe Pasó Un Día Entero Buscando El Calcetín Rojo: 2.-Redacta El Texto A Partir de La Planificación Que Hiciste ArribaAbrahan AlarcónNoch keine Bewertungen
- El Vuelo de Los CondoresDokument8 SeitenEl Vuelo de Los CondoresManuelNoch keine Bewertungen
- Taller 6 de Ética, Construyendo Mi Proyecto de VidaDokument2 SeitenTaller 6 de Ética, Construyendo Mi Proyecto de VidaGloria Amparo Gaviria Suarez100% (1)
- El Hombre Que Deseaba OroDokument5 SeitenEl Hombre Que Deseaba OroEliana CogolloNoch keine Bewertungen
- Escuelas AdministrativasDokument58 SeitenEscuelas AdministrativasJonathan MolinaNoch keine Bewertungen
- Cuestionario de ÉticaDokument7 SeitenCuestionario de ÉticaEmily GuerraNoch keine Bewertungen