Das könnte Ihnen auch gefallen
- CLS 747 200Dokument158 SeitenCLS 747 200Rodrigo Adam100% (8)
- Glass Inspection CriteriaDokument4 SeitenGlass Inspection CriteriabatteekhNoch keine Bewertungen
- Plastic Button Manufacturing Rs. 16.03 Million Dec - 2020Dokument20 SeitenPlastic Button Manufacturing Rs. 16.03 Million Dec - 2020ZarkKhanNoch keine Bewertungen
- Thin Film Solar Cell EfficiencyDokument9 SeitenThin Film Solar Cell EfficiencyZarkKhanNoch keine Bewertungen
- High Integrity Aluminum (GENERAL)Dokument140 SeitenHigh Integrity Aluminum (GENERAL)Kmilo Giraldo100% (3)
- OS CN DS DBMS SE Interview QuestionsDokument38 SeitenOS CN DS DBMS SE Interview QuestionsSeshu Gagan60% (5)
- Educational Solutions From Schneider ElectricDokument164 SeitenEducational Solutions From Schneider ElectricfaneeeeeeNoch keine Bewertungen
- Security Incident Report TemplateDokument3 SeitenSecurity Incident Report TemplateZarkKhanNoch keine Bewertungen
- EN 1991-1-4 NA enDokument4 SeitenEN 1991-1-4 NA enanuj3936100% (1)
- 1.0-Introduction: Technical Proposal R.O. SystemDokument13 Seiten1.0-Introduction: Technical Proposal R.O. SystemZarkKhanNoch keine Bewertungen
- Ball Mill SizingDokument10 SeitenBall Mill Sizingvvananth100% (1)
- Embedded Operating System and RepresentationDokument17 SeitenEmbedded Operating System and RepresentationroshanNoch keine Bewertungen
- EEE446 - Dr. Khurram - Lecture-5b PDFDokument35 SeitenEEE446 - Dr. Khurram - Lecture-5b PDFNayab FatimaNoch keine Bewertungen
- Lecture 04: Realtime Operating Systems (Rtos)Dokument57 SeitenLecture 04: Realtime Operating Systems (Rtos)MulugetaNoch keine Bewertungen
- CSE703 Module 2Dokument250 SeitenCSE703 Module 2suryanshmishra425Noch keine Bewertungen
- Unit-Iv: Real Time Operating SystemDokument55 SeitenUnit-Iv: Real Time Operating SystemarunmethaNoch keine Bewertungen
- CO4 CHAP 9 - (13-24) - PracticeDokument28 SeitenCO4 CHAP 9 - (13-24) - PracticeSoumyajit HazraNoch keine Bewertungen
- Operating SystemDokument11 SeitenOperating SystemMahendra SharmaNoch keine Bewertungen
- RTSDokument34 SeitenRTSयोगेशअर्यलNoch keine Bewertungen
- Osy Microproject (Final)Dokument14 SeitenOsy Microproject (Final)Pŕëm ÇĥüñïÿäṅNoch keine Bewertungen
- 5 OperatingSystemDokument41 Seiten5 OperatingSystemThanh Võ Thị HoàiNoch keine Bewertungen
- 10 ProgrammingParadigmsDokument48 Seiten10 ProgrammingParadigmsHải TrầnNoch keine Bewertungen
- Os (2marks Only)Dokument20 SeitenOs (2marks Only)John mugiNoch keine Bewertungen
- Introduction To Real-Time Systems: Manish Sarawat Asst. Prof (Dept. of MCA) GITS UdaipurDokument60 SeitenIntroduction To Real-Time Systems: Manish Sarawat Asst. Prof (Dept. of MCA) GITS Udaipurmanish saraswatNoch keine Bewertungen
- 01 RTS Issues & TypesDokument42 Seiten01 RTS Issues & TypesRamesh RameshNoch keine Bewertungen
- Introduction To Operating SystemDokument28 SeitenIntroduction To Operating Systemqwerty uiopNoch keine Bewertungen
- Real-Time SystemsDokument29 SeitenReal-Time Systemshowida nafaaNoch keine Bewertungen
- Presentation On Real Time Operating SystemsDokument35 SeitenPresentation On Real Time Operating SystemsKavin ArsenalonaNoch keine Bewertungen
- Module 3 Cosc 203 202223Dokument60 SeitenModule 3 Cosc 203 202223oluwatomisin oyaniyiNoch keine Bewertungen
- Real Time Operating SystemDokument1 SeiteReal Time Operating Systemninja6101999Noch keine Bewertungen
- Real Time Operating System (Rtos)Dokument21 SeitenReal Time Operating System (Rtos)Parvathy JayakumarNoch keine Bewertungen
- Final RtosDokument52 SeitenFinal RtosDaksh BothraNoch keine Bewertungen
- Multiprocessor and Real-Time Scheduling: Bina Ramamurthy CSE421Dokument29 SeitenMultiprocessor and Real-Time Scheduling: Bina Ramamurthy CSE421Magnus La CroixNoch keine Bewertungen
- OS DocsDokument11 SeitenOS Docs20e621Noch keine Bewertungen
- OS Chapter1 FinalDokument99 SeitenOS Chapter1 FinalshamNoch keine Bewertungen
- OSY 22516chapter1Dokument12 SeitenOSY 22516chapter12008 AvadhutNoch keine Bewertungen
- Final QBDokument28 SeitenFinal QBKavi PriyaNoch keine Bewertungen
- L-1.1.3 Types OSDokument21 SeitenL-1.1.3 Types OSSarthak ThakurNoch keine Bewertungen
- L3 Types OSDokument24 SeitenL3 Types OSAanchal KashyapNoch keine Bewertungen
- Unit-IV Embedded System: Real Time Operating System (RTOS)Dokument115 SeitenUnit-IV Embedded System: Real Time Operating System (RTOS)KARUNAMOORTHY BNoch keine Bewertungen
- Lec 10Dokument29 SeitenLec 10Prasanna ChamanaNoch keine Bewertungen
- ES II AssignmentDokument10 SeitenES II AssignmentRahul MandaogadeNoch keine Bewertungen
- Real Time Embedded - SystemDokument15 SeitenReal Time Embedded - SystemAndrei MocanuNoch keine Bewertungen
- 4 ProgrammingParadigmsDokument48 Seiten4 ProgrammingParadigmsThanh Võ Thị HoàiNoch keine Bewertungen
- RTU Paper Solution: Global Institute of Technology, JaipurDokument25 SeitenRTU Paper Solution: Global Institute of Technology, JaipurjitendraNoch keine Bewertungen
- Studies and Research, Pune: Symbiosis Institute of ComputerDokument26 SeitenStudies and Research, Pune: Symbiosis Institute of ComputerDhan CNoch keine Bewertungen
- RTOS Concepts190617 PDFDokument55 SeitenRTOS Concepts190617 PDFashNoch keine Bewertungen
- OS Module 1 Complete SolutionsDokument28 SeitenOS Module 1 Complete SolutionsSREEKARAN REDDY RAMASAHAYAMNoch keine Bewertungen
- ICS 143 - Principles of Operating SystemsDokument54 SeitenICS 143 - Principles of Operating SystemsSean MayNoch keine Bewertungen
- As Old GrowDokument14 SeitenAs Old GrowTemesgenNoch keine Bewertungen
- 2 Mark CS1252-OSDokument18 Seiten2 Mark CS1252-OSKavitha RaniNoch keine Bewertungen
- SBI Specialist Officers - Operating SystemsDokument10 SeitenSBI Specialist Officers - Operating SystemsAditya TomarNoch keine Bewertungen
- Real Time Operating Systems - UNIT 1 JNTU NotesDokument5 SeitenReal Time Operating Systems - UNIT 1 JNTU NotesSaisriram Karthikeya0% (1)
- Dcap608 Real Time SystemsDokument148 SeitenDcap608 Real Time Systemstauseef qidwaiNoch keine Bewertungen
- Presentation On Real Time Systems With LinuxDokument23 SeitenPresentation On Real Time Systems With LinuxSiddharth MohantyNoch keine Bewertungen
- OS INT Class3Dokument11 SeitenOS INT Class3KarthikeyaNoch keine Bewertungen
- Lecture 1 - Introduction To Operating SystemsDokument46 SeitenLecture 1 - Introduction To Operating SystemsfafNoch keine Bewertungen
- Survey of Real Time Scheduling Algorithms: Swati Pandit, Rajashree ShedgeDokument8 SeitenSurvey of Real Time Scheduling Algorithms: Swati Pandit, Rajashree ShedgeTesalonikaNoch keine Bewertungen
- 19 RealTime SynchronizationDokument27 Seiten19 RealTime Synchronizationapi-3726520Noch keine Bewertungen
- Unit 1Dokument106 SeitenUnit 1Sarkar GamingNoch keine Bewertungen
- Chapter 8 System Software: Instructor: Hao Zheng Comp. Sci. & Eng. USFDokument29 SeitenChapter 8 System Software: Instructor: Hao Zheng Comp. Sci. & Eng. USFGreen ChiquitaNoch keine Bewertungen
- Multitasking (Overview)Dokument23 SeitenMultitasking (Overview)Raghu VenkatesanNoch keine Bewertungen
- H.N.B.G.U. (A Central University) : Seminar On R.T.O.SDokument21 SeitenH.N.B.G.U. (A Central University) : Seminar On R.T.O.Sanant0007Noch keine Bewertungen
- Module3 Qing LiDokument99 SeitenModule3 Qing Lijezil3308Noch keine Bewertungen
- RTOS CourseDokument83 SeitenRTOS CoursemoamenmodyNoch keine Bewertungen
- NPTEL Course: Real Time Systems: Model Questions and Answers 1 June, 2010Dokument46 SeitenNPTEL Course: Real Time Systems: Model Questions and Answers 1 June, 2010Rahi SarkarNoch keine Bewertungen
- Dcap608 Real Time SystemsDokument146 SeitenDcap608 Real Time SystemsArindam DasNoch keine Bewertungen
- CSC423 - Lec12 - Distributed and Parallel ComputerSystemsDokument28 SeitenCSC423 - Lec12 - Distributed and Parallel ComputerSystemsdemro channelNoch keine Bewertungen
- An Improved Fuzzy-Based CPU Scheduling (IFCS) Algorithm For Real Time SystemsDokument6 SeitenAn Improved Fuzzy-Based CPU Scheduling (IFCS) Algorithm For Real Time SystemsKrishna MahajanNoch keine Bewertungen
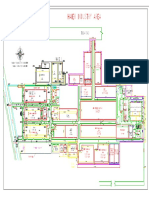
- Water Line DiagramDokument1 SeiteWater Line DiagramZarkKhanNoch keine Bewertungen
- Task Assigned by HOD: Targets Deptt SBU 2nd SBU (If Any) Target Date Actual Score Status RemarksDokument1 SeiteTask Assigned by HOD: Targets Deptt SBU 2nd SBU (If Any) Target Date Actual Score Status RemarksZarkKhanNoch keine Bewertungen
- Zero Breakdown MarchDokument1 SeiteZero Breakdown MarchZarkKhanNoch keine Bewertungen
- Die & Mold MNT - MarDokument1 SeiteDie & Mold MNT - MarZarkKhanNoch keine Bewertungen
- Unit Population Popoulation Male Population Transgender Karachi Thatta HUB Hydrabad Jamshoro Female PopulationDokument2 SeitenUnit Population Popoulation Male Population Transgender Karachi Thatta HUB Hydrabad Jamshoro Female PopulationZarkKhanNoch keine Bewertungen
- Street Light MarchDokument1 SeiteStreet Light MarchZarkKhanNoch keine Bewertungen
- Factories Internal Project - MarchDokument1 SeiteFactories Internal Project - MarchZarkKhanNoch keine Bewertungen
- Daily KWH ConsumDokument1 SeiteDaily KWH ConsumZarkKhanNoch keine Bewertungen
- Project PM Quality Control - Mar - SignedDokument1 SeiteProject PM Quality Control - Mar - SignedZarkKhanNoch keine Bewertungen
- Curriculum VitaeDokument2 SeitenCurriculum VitaeZarkKhanNoch keine Bewertungen
- Paint Workshop-3: Braced Bay Braced BayDokument1 SeitePaint Workshop-3: Braced Bay Braced BayZarkKhanNoch keine Bewertungen
- China's Exports To Saudi ArabiaDokument20 SeitenChina's Exports To Saudi ArabiaZarkKhanNoch keine Bewertungen
- Cirp Journal of Manufacturing Science and Technology: Prakash Rao, Michael R. Muller, Garan GunnDokument8 SeitenCirp Journal of Manufacturing Science and Technology: Prakash Rao, Michael R. Muller, Garan GunnZarkKhanNoch keine Bewertungen
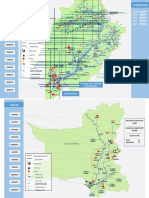
- Pakistan Gas Pipeline NetworkDokument2 SeitenPakistan Gas Pipeline NetworkZarkKhanNoch keine Bewertungen
- Power Sector - PACRA Research - Jan'21 - 1611329371Dokument36 SeitenPower Sector - PACRA Research - Jan'21 - 1611329371ZarkKhanNoch keine Bewertungen
- TGL Annual 2017Dokument72 SeitenTGL Annual 2017ZarkKhanNoch keine Bewertungen
- 2016 Annual ReportDokument238 Seiten2016 Annual ReportZarkKhanNoch keine Bewertungen
- Shifting Meterials: Ground Floor ReceptionDokument3 SeitenShifting Meterials: Ground Floor Receptionvishwas pandithNoch keine Bewertungen
- " " Reach: Ordering InformationDokument8 Seiten" " Reach: Ordering InformationTrong TranNoch keine Bewertungen
- Fast, Accurate Data Management Across The Enterprise: Fact Sheet: File-Aid / MvsDokument4 SeitenFast, Accurate Data Management Across The Enterprise: Fact Sheet: File-Aid / MvsLuis RamirezNoch keine Bewertungen
- 100ah - 12V - 6FM100 VISIONDokument2 Seiten100ah - 12V - 6FM100 VISIONBashar SalahNoch keine Bewertungen
- UMTS AircomDokument20 SeitenUMTS AircomDũng PhạmNoch keine Bewertungen
- An 80-Mg Railroad Engine A Coasting at 6.5 KM - H Strikes A 20Dokument4 SeitenAn 80-Mg Railroad Engine A Coasting at 6.5 KM - H Strikes A 20Aura Milena Martinez ChavarroNoch keine Bewertungen
- Advanced Fluid Mechanics: Luigi Di Micco Email: Luigi - Dimicco@dicea - Unipd.itDokument16 SeitenAdvanced Fluid Mechanics: Luigi Di Micco Email: Luigi - Dimicco@dicea - Unipd.itHubert MoforNoch keine Bewertungen
- Rational Suite ToolsDokument47 SeitenRational Suite ToolsZatin GuptaNoch keine Bewertungen
- Cache MemoryDokument20 SeitenCache MemoryKeshav Bharadwaj RNoch keine Bewertungen
- Magneto Hydro Dynamics PresentationDokument19 SeitenMagneto Hydro Dynamics PresentationVipul GuptaNoch keine Bewertungen
- Heat Transfer - A Basic Approach - OzisikDokument760 SeitenHeat Transfer - A Basic Approach - OzisikMaraParesque91% (33)
- Behringer UB2222FX PRODokument5 SeitenBehringer UB2222FX PROmtlcaqc97 mtlcaqc97Noch keine Bewertungen
- EN RotomaticDokument4 SeitenEN RotomaticnajeerwNoch keine Bewertungen
- Ude My For Business Course ListDokument51 SeitenUde My For Business Course ListShehroz BhuttaNoch keine Bewertungen
- Schneider EngineeringDokument1 SeiteSchneider EngineeringT.J. MayesNoch keine Bewertungen
- Teaching Finite Element Analysis For Design Engineers: August 2011Dokument7 SeitenTeaching Finite Element Analysis For Design Engineers: August 2011Nelu CheluNoch keine Bewertungen
- David Lowe Thesis PDFDokument201 SeitenDavid Lowe Thesis PDFKRISHNA VAMSHINoch keine Bewertungen
- Air-Bag: (1) Connector InformationDokument34 SeitenAir-Bag: (1) Connector InformationbakriramziNoch keine Bewertungen
- Honeywell P7640B1032 Differential Pressure Sensors PDFDokument2 SeitenHoneywell P7640B1032 Differential Pressure Sensors PDFMarcello PorrinoNoch keine Bewertungen
- Woodworking Plans - Wheelbarrow PlanterDokument3 SeitenWoodworking Plans - Wheelbarrow PlanterMirel HotescuNoch keine Bewertungen
- AI in RobotsDokument75 SeitenAI in RobotsIslam SehsahNoch keine Bewertungen
- Cosben e Brochure PDFDokument28 SeitenCosben e Brochure PDFsmw maintanceNoch keine Bewertungen
- Propeller DesignDokument1 SeitePropeller DesignKeerthana MaheswarlaNoch keine Bewertungen
- 4 and 6 Pole MotorDokument6 Seiten4 and 6 Pole Motorarajamani78100% (1)