Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
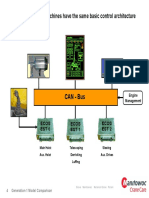
- All Generation 1 Machines Have The Same Basic Control ArchitectureDokument1 SeiteAll Generation 1 Machines Have The Same Basic Control Architecturelecuellarq85gmailcomNoch keine Bewertungen
- Cranes - Notable Features - RT775Dokument1 SeiteCranes - Notable Features - RT775lecuellarq85gmailcomNoch keine Bewertungen
- Band-pass and band-rejection filter design responsesDokument1 SeiteBand-pass and band-rejection filter design responseslecuellarq85gmailcomNoch keine Bewertungen
- A) A DW) A) A DW +: Table 16-2. Values of For Different Filter Types and Different QsDokument1 SeiteA) A DW) A) A DW +: Table 16-2. Values of For Different Filter Types and Different Qslecuellarq85gmailcomNoch keine Bewertungen
- PAT Iflex5 Parte003Dokument2 SeitenPAT Iflex5 Parte003lecuellarq85gmailcomNoch keine Bewertungen
- Example 16-5. Second-Order MFB Band-Pass Filter With F 1 KHZDokument1 SeiteExample 16-5. Second-Order MFB Band-Pass Filter With F 1 KHZlecuellarq85gmailcomNoch keine Bewertungen
- Op Amps37Dokument1 SeiteOp Amps37lecuellarq85gmailcomNoch keine Bewertungen
- PAT Iflex5 Parte005Dokument2 SeitenPAT Iflex5 Parte005lecuellarq85gmailcomNoch keine Bewertungen
- Notice: Service Manual iFLEX5Dokument2 SeitenNotice: Service Manual iFLEX5lecuellarq85gmailcomNoch keine Bewertungen
- Op Amps36Dokument1 SeiteOp Amps36lecuellarq85gmailcomNoch keine Bewertungen
- Example 16-6. Fourth-Order Butterworth Band-Pass FilterDokument1 SeiteExample 16-6. Fourth-Order Butterworth Band-Pass Filterlecuellarq85gmailcomNoch keine Bewertungen
- F 10 KHZ 1.036 9.653 KHZ F 10 KHZ 1.036 10.36 KHZ: Filter 1: Filter 2Dokument1 SeiteF 10 KHZ 1.036 9.653 KHZ F 10 KHZ 1.036 10.36 KHZ: Filter 1: Filter 2lecuellarq85gmailcomNoch keine Bewertungen
- 16.5.1.1 Sallen-Key TopologyDokument1 Seite16.5.1.1 Sallen-Key Topologylecuellarq85gmailcomNoch keine Bewertungen
- 16.5.1.2 Multiple Feedback Topology: Figure 16-34. MFB Band-PassDokument1 Seite16.5.1.2 Multiple Feedback Topology: Figure 16-34. MFB Band-Passlecuellarq85gmailcomNoch keine Bewertungen
- Second Filter: R 1 2 F A C 1 2 10 HZ 0.756 100 10 F 2.105 KDokument1 SeiteSecond Filter: R 1 2 F A C 1 2 10 HZ 0.756 100 10 F 2.105 Klecuellarq85gmailcomNoch keine Bewertungen
- Low-Pass to Band-Pass Filter TransitionDokument1 SeiteLow-Pass to Band-Pass Filter Transitionlecuellarq85gmailcomNoch keine Bewertungen
- A C C A 2C C R CC B 2C C R CC: High-Pass Filter DesignDokument26 SeitenA C C A 2C C R CC B 2C C R CC: High-Pass Filter Designlecuellarq85gmailcomNoch keine Bewertungen
- 16.5.1 Second-Order Band-Pass Filter: A(s) A 1 S 1 S 1 SDokument1 Seite16.5.1 Second-Order Band-Pass Filter: A(s) A 1 S 1 S 1 Slecuellarq85gmailcomNoch keine Bewertungen
- First-Order High-Pass Filter Circuit Diagrams and Transfer FunctionsDokument1 SeiteFirst-Order High-Pass Filter Circuit Diagrams and Transfer Functionslecuellarq85gmailcomNoch keine Bewertungen
- 16.4.2.2 Multiple Feedback Topology: Figure 16-29. Second-Order MFB High-Pass FilterDokument25 Seiten16.4.2.2 Multiple Feedback Topology: Figure 16-29. Second-Order MFB High-Pass Filterlecuellarq85gmailcomNoch keine Bewertungen
- Second Filter: Figure 16-21. Second-Order Unity-Gain Sallen-Key Low-Pass FilterDokument1 SeiteSecond Filter: Figure 16-21. Second-Order Unity-Gain Sallen-Key Low-Pass Filterlecuellarq85gmailcomNoch keine Bewertungen
- Op Amps22Dokument24 SeitenOp Amps22lecuellarq85gmailcomNoch keine Bewertungen
- Adjustable second-order low-pass filter transfer function and coefficientsDokument1 SeiteAdjustable second-order low-pass filter transfer function and coefficientslecuellarq85gmailcomNoch keine Bewertungen
- Figure 16-24. Developing The Gain Response of A High-Pass FilterDokument21 SeitenFigure 16-24. Developing The Gain Response of A High-Pass Filterlecuellarq85gmailcomNoch keine Bewertungen
- C C 4b A: Example 16-2. Second-Order Unity-Gain Tschebyscheff Low-Pass FilterDokument1 SeiteC C 4b A: Example 16-2. Second-Order Unity-Gain Tschebyscheff Low-Pass Filterlecuellarq85gmailcomNoch keine Bewertungen
- Figure 16-15. General Sallen-Key Low-Pass Filter: A(s) A 1 C R R 1 A R C S R R C C SDokument1 SeiteFigure 16-15. General Sallen-Key Low-Pass Filter: A(s) A 1 C R R 1 A R C S R R C C Slecuellarq85gmailcomNoch keine Bewertungen
- 16.4 High-Pass Filter Design: Figure 16-22. Fifth-Order Unity-Gain Butterworth Low-Pass FilterDokument1 Seite16.4 High-Pass Filter Design: Figure 16-22. Fifth-Order Unity-Gain Butterworth Low-Pass Filterlecuellarq85gmailcomNoch keine Bewertungen
- C C 4b A: Example 16-2. Second-Order Unity-Gain Tschebyscheff Low-Pass FilterDokument1 SeiteC C 4b A: Example 16-2. Second-Order Unity-Gain Tschebyscheff Low-Pass Filterlecuellarq85gmailcomNoch keine Bewertungen
- Op Amps13 PDFDokument1 SeiteOp Amps13 PDFlecuellarq85gmailcomNoch keine Bewertungen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- CMMP AS M3 HW - 2012 03 - 760322g1 PDFDokument112 SeitenCMMP AS M3 HW - 2012 03 - 760322g1 PDFViick MartinezNoch keine Bewertungen
- Filter overview and capacities for John Deere 7030 tractorsDokument2 SeitenFilter overview and capacities for John Deere 7030 tractorsАндрій ДзядевичNoch keine Bewertungen
- 'Identifying Basic Hand Tools and Test Equipment: General ClassificationDokument15 Seiten'Identifying Basic Hand Tools and Test Equipment: General ClassificationGaming AmbinNoch keine Bewertungen
- AWD60A User's ManualDokument32 SeitenAWD60A User's Manualbulacanhomesite100% (1)
- Motoweld SR350 ManualDokument101 SeitenMotoweld SR350 Manualouyangxin1991Noch keine Bewertungen
- MX 10-20KVA 31 (1) - 044304.pdf-030346Dokument4 SeitenMX 10-20KVA 31 (1) - 044304.pdf-030346Salim Abi zeidNoch keine Bewertungen
- MC56F8013Dokument126 SeitenMC56F8013Asad AhmedNoch keine Bewertungen
- Severe Duty Water Cannon Styles 3491 & 3492 Electric & Hydraulic Disassembly/Assembly Service Repair Procedure Australian OnlyDokument16 SeitenSevere Duty Water Cannon Styles 3491 & 3492 Electric & Hydraulic Disassembly/Assembly Service Repair Procedure Australian OnlyJL Z AvilesNoch keine Bewertungen
- Postflood Restartprocedure HOFFMAN LAMSONDokument1 SeitePostflood Restartprocedure HOFFMAN LAMSONLuis Fernando BravoNoch keine Bewertungen
- Bobcat 320 Excavator Parts Catalogue Manual SN 562313001 and Above PDFDokument29 SeitenBobcat 320 Excavator Parts Catalogue Manual SN 562313001 and Above PDFjnfksmemms0% (1)
- Mercedes W245 Owner's ManualDokument262 SeitenMercedes W245 Owner's Manualgelu uNoch keine Bewertungen
- Automatic Straightening Machine From Coil: The History of InnovationDokument5 SeitenAutomatic Straightening Machine From Coil: The History of InnovationLuiz HenriqueNoch keine Bewertungen
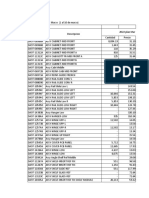
- Marzo 2022 plan Mar codigos y descripciones de piezasDokument11 SeitenMarzo 2022 plan Mar codigos y descripciones de piezasGuadaLuphe FLoorezzNoch keine Bewertungen
- 2010 Ford Pickup SVT RaptorDokument115 Seiten2010 Ford Pickup SVT RaptorMiguel Quema100% (1)
- Practical Physics (Part-II)Dokument66 SeitenPractical Physics (Part-II)Raju SinghNoch keine Bewertungen
- Physical Transmission MediaDokument47 SeitenPhysical Transmission MediaabdulazizNoch keine Bewertungen
- P Series Strain GaugesDokument1 SeiteP Series Strain Gaugesjbmune6683Noch keine Bewertungen
- Supercap Leveler PDFDokument11 SeitenSupercap Leveler PDFCazimir BostanNoch keine Bewertungen
- ANSI CodesDokument12 SeitenANSI CodesmgkvprNoch keine Bewertungen
- XQ500 Spec SheetDokument4 SeitenXQ500 Spec Sheetvbazan5299100% (1)
- ASME B18.2.6 2010 (1) - Fasteners For Use in Structural Applications-15-17Dokument3 SeitenASME B18.2.6 2010 (1) - Fasteners For Use in Structural Applications-15-17Andres SilveyraNoch keine Bewertungen
- ELE3-18 MostUpdated 04052022Dokument43 SeitenELE3-18 MostUpdated 04052022葉朗Noch keine Bewertungen
- 6 BLP Spesifikasi Teknis NOC 14920Dokument3 Seiten6 BLP Spesifikasi Teknis NOC 14920Ka BudiKaNoch keine Bewertungen
- Binzel Gorilniki Robo enDokument116 SeitenBinzel Gorilniki Robo enalessia olgiatiNoch keine Bewertungen
- HyundaiDokument11 SeitenHyundaiSebastian BryceNoch keine Bewertungen
- Mpi Unit 1Dokument22 SeitenMpi Unit 1sree ramyaNoch keine Bewertungen
- LT Cable ScheduleDokument3 SeitenLT Cable ScheduleSaquib Khan100% (2)
- CatioLift Technical InformationDokument9 SeitenCatioLift Technical InformationNazihCosmetics0% (1)
- Bipolar Forceps 3-3 - 8in CrvreuseDokument4 SeitenBipolar Forceps 3-3 - 8in CrvreuseSalma El MamouniNoch keine Bewertungen
- 6113 e enDokument28 Seiten6113 e enPenyair SufiNoch keine Bewertungen