Das könnte Ihnen auch gefallen
- ZeinabDokument1 SeiteZeinabFaisal FarooqNoch keine Bewertungen
- Application Form - Gosecure - Travel InsuranceDokument1 SeiteApplication Form - Gosecure - Travel InsuranceFaisal FarooqNoch keine Bewertungen
- MaarifulQuran Volume1 ShaykhMuftiMuhammadShafir.ADokument703 SeitenMaarifulQuran Volume1 ShaykhMuftiMuhammadShafir.AFaisal FarooqNoch keine Bewertungen
- MaarifulQuran Index ShaykhMuftiMuhammadShafir.ADokument209 SeitenMaarifulQuran Index ShaykhMuftiMuhammadShafir.ASaifullah KhanNoch keine Bewertungen
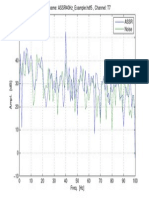
- ASSR40Hz Example T7Dokument1 SeiteASSR40Hz Example T7Faisal FarooqNoch keine Bewertungen
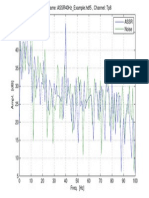
- ASSR40Hz Example Tp8Dokument1 SeiteASSR40Hz Example Tp8Faisal FarooqNoch keine Bewertungen
- Neurocomputing 2008aDokument11 SeitenNeurocomputing 2008aFaisal FarooqNoch keine Bewertungen
- BIOTELEMETRYDokument14 SeitenBIOTELEMETRYFenil DesaiNoch keine Bewertungen
- BCI-FES Training System Design and Implementation For Rehabilitation of Stroke PatientsDokument4 SeitenBCI-FES Training System Design and Implementation For Rehabilitation of Stroke PatientsFaisal FarooqNoch keine Bewertungen
- Item'S Total Quantity Sohail Asad Shoaib Raazifahimzafar Jalal Iram MurtazaDokument18 SeitenItem'S Total Quantity Sohail Asad Shoaib Raazifahimzafar Jalal Iram MurtazaFaisal FarooqNoch keine Bewertungen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Designing A 3D Jewelry ModelDokument4 SeitenDesigning A 3D Jewelry ModelAbdulrahman JradiNoch keine Bewertungen
- Numerical Techniques For Global AtmosphericDokument577 SeitenNumerical Techniques For Global AtmosphericTatiana N. LeónNoch keine Bewertungen
- Crisostomo Vs Courts of Appeal G.R. No. 138334 August 25, 2003Dokument5 SeitenCrisostomo Vs Courts of Appeal G.R. No. 138334 August 25, 2003RGIQNoch keine Bewertungen
- MSW - 1 - 2016 Munisicpal Solid Waste Rules-2016 - Vol IDokument96 SeitenMSW - 1 - 2016 Munisicpal Solid Waste Rules-2016 - Vol Inimm1962Noch keine Bewertungen
- 0 - Resume - Preity Thadani PDFDokument3 Seiten0 - Resume - Preity Thadani PDFClash ClashhNoch keine Bewertungen
- Appendix 24 - QUARTERLY REPORT OF REVENUE AND OTHER RECEIPTSDokument1 SeiteAppendix 24 - QUARTERLY REPORT OF REVENUE AND OTHER RECEIPTSPau PerezNoch keine Bewertungen
- Finaldis2011 1Dokument4 SeitenFinaldis2011 1syaiful.idzwanNoch keine Bewertungen
- Rule: Steel Import Monitoring and Analysis SystemDokument8 SeitenRule: Steel Import Monitoring and Analysis SystemJustia.comNoch keine Bewertungen
- Techniques Tips For Polishing PDFDokument6 SeitenTechniques Tips For Polishing PDFrobin parmarNoch keine Bewertungen
- Account Statement 060922 051222Dokument51 SeitenAccount Statement 060922 051222allison squad xXNoch keine Bewertungen
- Materials Science and Engineering ADokument10 SeitenMaterials Science and Engineering Akhudhayer1970Noch keine Bewertungen
- Report Managerial Finance@UniklDokument18 SeitenReport Managerial Finance@UniklLee WongNoch keine Bewertungen
- SKF BeyondZero White Paper 12761ENDokument12 SeitenSKF BeyondZero White Paper 12761ENdiosmio111Noch keine Bewertungen
- Kamaka Company Catalogue 2016 PDFDokument13 SeitenKamaka Company Catalogue 2016 PDFWendy0% (3)
- KACE SeDokument63 SeitenKACE SeAbdul RahimNoch keine Bewertungen
- Cover LetterDokument16 SeitenCover LetterAjmal RafiqueNoch keine Bewertungen
- 1 Diet Guide PDFDokument43 Seiten1 Diet Guide PDFYG1Noch keine Bewertungen
- Helicopter MaintenanceDokument347 SeitenHelicopter MaintenanceJai Deep88% (24)
- 213-Article Text-620-1-10-20201118Dokument6 Seiten213-Article Text-620-1-10-20201118Arlin FebriantiNoch keine Bewertungen
- Kathrein 739624Dokument2 SeitenKathrein 739624anna.bNoch keine Bewertungen
- DQI and Use Mentors JDDokument2 SeitenDQI and Use Mentors JDLunaltNoch keine Bewertungen
- Photoshop TheoryDokument10 SeitenPhotoshop TheoryShri BhagwanNoch keine Bewertungen
- BookingDokument2 SeitenBookingAbhishek Kumar ChaturvediNoch keine Bewertungen
- Fresher Jobs July 31Dokument18 SeitenFresher Jobs July 31Harshad SonarNoch keine Bewertungen
- 2019 FTX2000S Course OutlineDokument11 Seiten2019 FTX2000S Course OutlineAhmed PatelNoch keine Bewertungen
- Roger Rabbit:, Forest Town, CA 90020Dokument3 SeitenRoger Rabbit:, Forest Town, CA 90020Marc TNoch keine Bewertungen
- Bizagi Podcast TranscriptDokument6 SeitenBizagi Podcast TranscriptHortencia RodriguezNoch keine Bewertungen
- Strategic PlanningDokument24 SeitenStrategic PlanningSara Sharma0% (1)
- 09120110155668 (1)Dokument49 Seiten09120110155668 (1)Upul NishanthaNoch keine Bewertungen
- CANVASS FORM MerchandiseDokument1 SeiteCANVASS FORM MerchandiseJuan VicenteNoch keine Bewertungen