Das könnte Ihnen auch gefallen
- Interrupts 8051 MicrocontrollerDokument25 SeitenInterrupts 8051 Microcontrollerबृजभूषणशर्माNoch keine Bewertungen
- MPMC U5Dokument81 SeitenMPMC U5Kalyan GajareNoch keine Bewertungen
- 04 - 8051 InterruptsDokument33 Seiten04 - 8051 Interruptsatiqakbar1Noch keine Bewertungen
- Microcontrollers: UNIT-2 Introduction and 8051 Architecture: IntroductionDokument116 SeitenMicrocontrollers: UNIT-2 Introduction and 8051 Architecture: IntroductionVivek ThotaNoch keine Bewertungen
- 2150907Dokument14 Seiten2150907Prashant ShahNoch keine Bewertungen
- 8051 InterruptsDokument4 Seiten8051 Interruptsarunambrose2004Noch keine Bewertungen
- 8051 InterruptsDokument19 Seiten8051 Interruptsmd Sadikul IslamNoch keine Bewertungen
- 8051 Interrupts: (Timer Interrupts and Serial Interrupts)Dokument35 Seiten8051 Interrupts: (Timer Interrupts and Serial Interrupts)Shreyaskar SinghNoch keine Bewertungen
- 8051 InterruptDokument48 Seiten8051 InterruptIMDAD HUSSAIN MAMUDNoch keine Bewertungen
- Int 8051Dokument33 SeitenInt 8051vijay_marathe01Noch keine Bewertungen
- 8051 Interrupts Programming in CDokument46 Seiten8051 Interrupts Programming in CDr Narayana Swamy RamaiahNoch keine Bewertungen
- 8051 InterruptsDokument16 Seiten8051 InterruptsBharathNoch keine Bewertungen
- Interrupts 8051Dokument24 SeitenInterrupts 8051Raja MadhuvanthiNoch keine Bewertungen
- Module 5 Session 1Dokument14 SeitenModule 5 Session 1SOMESHNoch keine Bewertungen
- Interrupt: Handler. ISR Tells The Processor or Controller What To Do When The InterruptDokument7 SeitenInterrupt: Handler. ISR Tells The Processor or Controller What To Do When The InterruptSmita Patil-JagdaleNoch keine Bewertungen
- Interrupt Programming With 8051Dokument36 SeitenInterrupt Programming With 8051ABHISHEK DWIVEDI (RA2111043010082)Noch keine Bewertungen
- Lec6 8051 InterruptsDokument12 SeitenLec6 8051 InterruptsOdoch HerbertNoch keine Bewertungen
- 14-Programming of Hardware Interrupts - Int0 & Int1-06-03-2023Dokument32 Seiten14-Programming of Hardware Interrupts - Int0 & Int1-06-03-2023BRO CUBIESNoch keine Bewertungen
- Chapter 3 Interrupt Control SystemDokument52 SeitenChapter 3 Interrupt Control SystemJevithaNoch keine Bewertungen
- The 8051 Microcontroller and Embedded Systems: Interrupts Programming in AssemblyDokument26 SeitenThe 8051 Microcontroller and Embedded Systems: Interrupts Programming in AssemblyAnushkaSinhaNoch keine Bewertungen
- 10 InterruptsDokument93 Seiten10 InterruptsSamuelClementNoch keine Bewertungen
- 8051 Interrupt and SerielDokument52 Seiten8051 Interrupt and SerielVenkatasamy VijayarajNoch keine Bewertungen
- Module-3: Interrupts and ProgrammingDokument44 SeitenModule-3: Interrupts and ProgrammingPillarisetty PremsaiNoch keine Bewertungen
- 8051 Interrupts and Interfacing Applications: Module - 5Dokument26 Seiten8051 Interrupts and Interfacing Applications: Module - 5Pate VishnuNoch keine Bewertungen
- Interrupts ProgrammingDokument7 SeitenInterrupts Programmingirfan_kembhaviNoch keine Bewertungen
- Fundamentals of Microcontroller & Its Application: Unit-IvDokument15 SeitenFundamentals of Microcontroller & Its Application: Unit-IvRajan PatelNoch keine Bewertungen
- Microprocessor and Microcontroller: Muhammad Faizan MalikDokument39 SeitenMicroprocessor and Microcontroller: Muhammad Faizan MalikHassan Ul HaqNoch keine Bewertungen
- Unit 4 InterruptDokument33 SeitenUnit 4 InterruptDarvis IdhamNoch keine Bewertungen
- Unit-V Interfacing Microcontrollers: Course Material (Question Bank)Dokument4 SeitenUnit-V Interfacing Microcontrollers: Course Material (Question Bank)kadaNoch keine Bewertungen
- 8051 Interrupts: MC & Es Class 09 - 25 August September 2023Dokument41 Seiten8051 Interrupts: MC & Es Class 09 - 25 August September 2023Vinay Pratap Singh RajawatNoch keine Bewertungen
- MPMC Unit 5Dokument62 SeitenMPMC Unit 5ganeshNoch keine Bewertungen
- Interrupts PDFDokument37 SeitenInterrupts PDFMuhammad BilalNoch keine Bewertungen
- Interrupts in 8051: Microprocessor Laboratory EE-337Dokument11 SeitenInterrupts in 8051: Microprocessor Laboratory EE-337Ayandev BarmanNoch keine Bewertungen
- St. Joseph College of EngineeringDokument19 SeitenSt. Joseph College of EngineeringjaisathiNoch keine Bewertungen
- INTERRUPTSDokument13 SeitenINTERRUPTSsanirudhnairNoch keine Bewertungen
- Chapter 4Dokument27 SeitenChapter 4Saifullah ZabaniNoch keine Bewertungen
- Interrupt ProgrammingDokument20 SeitenInterrupt ProgrammingpratikgohelNoch keine Bewertungen
- InterruptDokument19 SeitenInterruptMalak Al-AshiNoch keine Bewertungen
- Interrupcions: Processor - I/O Speed MismatchDokument18 SeitenInterrupcions: Processor - I/O Speed MismatchRonyVargasNoch keine Bewertungen
- Exp4 Hardware Interrupts in Microcontroller ATMEGA32Dokument11 SeitenExp4 Hardware Interrupts in Microcontroller ATMEGA32Sushupthi R KoushikNoch keine Bewertungen
- Counter ProgrammingDokument26 SeitenCounter ProgrammingAyan AcharyaNoch keine Bewertungen
- 8051 Interrupt TypesDokument4 Seiten8051 Interrupt TypesSan RamNoch keine Bewertungen
- Timer, AdcDokument16 SeitenTimer, Adchefawoj62Noch keine Bewertungen
- Interrupts in 8085Dokument17 SeitenInterrupts in 8085JAAPA100% (2)
- Lect 20 EtDokument10 SeitenLect 20 EtmadhavNoch keine Bewertungen
- 8051 Microcontroller Interrupts Programming in AssemblyDokument20 Seiten8051 Microcontroller Interrupts Programming in AssemblymalhiavtarsinghNoch keine Bewertungen
- Chương 3 - 3.5. 8051- Ngắt và lập trình ngắtDokument56 SeitenChương 3 - 3.5. 8051- Ngắt và lập trình ngắtHà Lê Trọng NghĩaNoch keine Bewertungen
- The 8051 Microcontroller and Embedded Systems: Interrupts Programming in AssemblyDokument35 SeitenThe 8051 Microcontroller and Embedded Systems: Interrupts Programming in AssemblyVidya MekaNoch keine Bewertungen
- ExternalInterrupt PPTDokument28 SeitenExternalInterrupt PPTsharadaNoch keine Bewertungen
- L3 - InterruptDokument39 SeitenL3 - Interruptandreasmagaka11Noch keine Bewertungen
- EE390 Notes Qureshi Ch1ToCh11 T201 ByRakadAlwafiDokument23 SeitenEE390 Notes Qureshi Ch1ToCh11 T201 ByRakadAlwafiAbdullah AlmohammedaliNoch keine Bewertungen
- Microprocessor & Microcontrollers: Interrupts ProgrammingDokument31 SeitenMicroprocessor & Microcontrollers: Interrupts ProgrammingAbdul Rehman AfzalNoch keine Bewertungen
- MPMC Unit 4Dokument35 SeitenMPMC Unit 4Dharani ChinnaNoch keine Bewertungen
- 8051 CH11Dokument73 Seiten8051 CH11tansnvarmaNoch keine Bewertungen
- GopinathDokument383 SeitenGopinathShreya Jain 21BEC0108Noch keine Bewertungen
- Interrupts - Signals Raised by Hardware External To The MP That Needs A Response (Help) From The MPDokument54 SeitenInterrupts - Signals Raised by Hardware External To The MP That Needs A Response (Help) From The MPLakshmi SagarNoch keine Bewertungen
- Interrupt: ECE473/573 Microprocessor System Design, Dr. Shiue 1Dokument25 SeitenInterrupt: ECE473/573 Microprocessor System Design, Dr. Shiue 1shanty85Noch keine Bewertungen
- CSULB - CECS 285 - Chapter Eleven Fall 2010 - R.W. Allison 1Dokument17 SeitenCSULB - CECS 285 - Chapter Eleven Fall 2010 - R.W. Allison 1Lavanya MeenakshisundaramNoch keine Bewertungen
- Interrupt Interface of 8088 - Part1Dokument18 SeitenInterrupt Interface of 8088 - Part1shahd dawoodNoch keine Bewertungen
- NQ Series: (Ethernet/Ip)Dokument36 SeitenNQ Series: (Ethernet/Ip)Matheus GeraldinoNoch keine Bewertungen
- UntitledDokument316 SeitenUntitledJuancaNoch keine Bewertungen
- Hpe Support Center: HP Proliant Ml10 V2 Server - Spare PartsDokument3 SeitenHpe Support Center: HP Proliant Ml10 V2 Server - Spare PartsTarra Ramakrishna RaoNoch keine Bewertungen
- Project - Setting Up A CI - CD Pipeline Using Java, Maven, JUnit, Jenkins, GitHub, AWS EC2, Docker, and AWS S3Dokument24 SeitenProject - Setting Up A CI - CD Pipeline Using Java, Maven, JUnit, Jenkins, GitHub, AWS EC2, Docker, and AWS S3chidiebere onwuchekwaNoch keine Bewertungen
- CIS Microsoft SQL Server 2019 Benchmark v1.0.0 PDFDokument100 SeitenCIS Microsoft SQL Server 2019 Benchmark v1.0.0 PDFConciencia ImmortalNoch keine Bewertungen
- Economics Thesis Blue VariantDokument37 SeitenEconomics Thesis Blue VarianthudarusliNoch keine Bewertungen
- Approvals How To OTLDokument36 SeitenApprovals How To OTLaeozdogan100% (1)
- CVSS Guide 2Dokument33 SeitenCVSS Guide 2tesNoch keine Bewertungen
- Computer Basics TextbookDokument103 SeitenComputer Basics Textbookapi-19727066Noch keine Bewertungen
- Micro-Teach Lesson Plan - Scratch JuniorDokument5 SeitenMicro-Teach Lesson Plan - Scratch Juniorapi-514024162Noch keine Bewertungen
- C-Notes For StudentDokument86 SeitenC-Notes For Studentsai_ram2291175100% (5)
- Installing Computer Systems and Network.Dokument72 SeitenInstalling Computer Systems and Network.Justin BurnNoch keine Bewertungen
- Resume Sherry Schwarcz BerlitzDokument4 SeitenResume Sherry Schwarcz Berlitzapi-206510088Noch keine Bewertungen
- HC110110017 Link State Routing With OSPFDokument29 SeitenHC110110017 Link State Routing With OSPFjscansinoNoch keine Bewertungen
- Setting Up Remote Access To Intouch: Maury BeckDokument32 SeitenSetting Up Remote Access To Intouch: Maury BeckHalilNoch keine Bewertungen
- 344.48 Nvidia Control Panel Quick Start Guide PDFDokument33 Seiten344.48 Nvidia Control Panel Quick Start Guide PDFRestu Hadi RetnoNoch keine Bewertungen
- AugDokument97 SeitenAugAnonymous 9ufCY3Noch keine Bewertungen
- Linkedin-Skill-Assessments-Quizzes - Javascript-Quiz - MD at Main Ebazhanov - Linkedin-Skill-Assessments-Quizzes GitHubDokument41 SeitenLinkedin-Skill-Assessments-Quizzes - Javascript-Quiz - MD at Main Ebazhanov - Linkedin-Skill-Assessments-Quizzes GitHubAnkit RajNoch keine Bewertungen
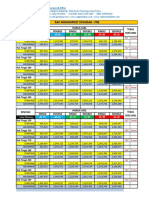
- Rak Minimarket Standar - P90: Single Double Single Double Single Double Rincian Harga Jual Tebal ShelvingDokument6 SeitenRak Minimarket Standar - P90: Single Double Single Double Single Double Rincian Harga Jual Tebal ShelvingAndi HadisaputraNoch keine Bewertungen
- ASM 12cDokument304 SeitenASM 12cFrank Hack100% (2)
- News 89Dokument7 SeitenNews 89Adrianus YogaNoch keine Bewertungen
- Spyeye Analysis II enDokument16 SeitenSpyeye Analysis II engsree9Noch keine Bewertungen
- Framework of E-Government Technical Infrastructure. Case of EstoniaDokument5 SeitenFramework of E-Government Technical Infrastructure. Case of EstoniaSonia AraujoNoch keine Bewertungen
- Mini Project Report FMSDokument6 SeitenMini Project Report FMSjohnNoch keine Bewertungen
- How To Use Mapinfo To Create Thematic Map To Analyze DT Result by TEMSDokument7 SeitenHow To Use Mapinfo To Create Thematic Map To Analyze DT Result by TEMSMuhammad Nura AbubakarNoch keine Bewertungen
- Mod 5Dokument26 SeitenMod 5Triparna PoddarNoch keine Bewertungen
- Brochure IFS ApplicationsDokument32 SeitenBrochure IFS ApplicationslvlnprajuNoch keine Bewertungen
- Java Applet NotesDokument4 SeitenJava Applet NotesSayani ChandraNoch keine Bewertungen
- Released DmapsDokument396 SeitenReleased Dmapsredoctober24Noch keine Bewertungen
- Class Discussions SheetDokument98 SeitenClass Discussions SheetEhsan AliNoch keine Bewertungen