Das könnte Ihnen auch gefallen
- Application. Essay Prompts 2014Dokument1 SeiteApplication. Essay Prompts 2014TimiNoch keine Bewertungen
- 17 - Chapter 9 - Stored ProceduresDokument42 Seiten17 - Chapter 9 - Stored ProceduresNguyen Hoang Kien (K16HL)Noch keine Bewertungen
- GrammarDokument61 SeitenGrammaryasmina sbeityNoch keine Bewertungen
- Test 6Dokument32 SeitenTest 6Santosh JagtapNoch keine Bewertungen
- Program HMMTFebruary2014Dokument10 SeitenProgram HMMTFebruary2014xSonyWIiNoch keine Bewertungen
- Cornell Tech Url Shortening ResearchDokument11 SeitenCornell Tech Url Shortening ResearchAndy GreenbergNoch keine Bewertungen
- (Solved) Ola College of Education (OCE) Is One of The Colleges of Education... - Course HeroDokument3 Seiten(Solved) Ola College of Education (OCE) Is One of The Colleges of Education... - Course HeroJdkrkejNoch keine Bewertungen
- DWH Int QuestionsDokument9 SeitenDWH Int QuestionsHemanth Nallapaneni100% (1)
- AA& CO-CCA, CO-PCA and Integration of FI With Other Modules MM, SD and ControllingDokument3 SeitenAA& CO-CCA, CO-PCA and Integration of FI With Other Modules MM, SD and Controllinganilkumar gcNoch keine Bewertungen
- Week 4 Types of SentenceDokument7 SeitenWeek 4 Types of SentenceAya MeftiNoch keine Bewertungen
- Digital Finance - Data Engineering LeadDokument3 SeitenDigital Finance - Data Engineering LeadAlejandro ManzanelliNoch keine Bewertungen
- ELV Draftsman 2023Dokument3 SeitenELV Draftsman 2023Praveen RajNoch keine Bewertungen
- SQL Tutorial 1Dokument107 SeitenSQL Tutorial 1srinath nandamNoch keine Bewertungen
- DataWarehousing Interview Questions Answers PDFDokument11 SeitenDataWarehousing Interview Questions Answers PDFajax248590100% (1)
- Business Research Methods: Bivariate Analysis: Measures of AssociationsDokument66 SeitenBusiness Research Methods: Bivariate Analysis: Measures of AssociationsswathravNoch keine Bewertungen
- Lab Manual Stqa AmanDokument33 SeitenLab Manual Stqa AmanHarsh officialNoch keine Bewertungen
- 15 Manage Datasets in Power BIDokument41 Seiten15 Manage Datasets in Power BIJYNoch keine Bewertungen
- DMStratTemplate V0.5Dokument16 SeitenDMStratTemplate V0.5devdliveNoch keine Bewertungen
- AP Calculus AB Test 3 Review With Answers16 17 PDFDokument6 SeitenAP Calculus AB Test 3 Review With Answers16 17 PDFEthan NguyenNoch keine Bewertungen
- Copy of Forms-College ResearchDokument18 SeitenCopy of Forms-College Researchapi-409745904Noch keine Bewertungen
- Mid Term ExamDokument3 SeitenMid Term Examtibowe8Noch keine Bewertungen
- Understanding Money HandbookDokument46 SeitenUnderstanding Money HandbookSujata SinghNoch keine Bewertungen
- INFORMATICADokument388 SeitenINFORMATICAOliber Alberca VargasNoch keine Bewertungen
- BU350 Organizational BehaviorDokument58 SeitenBU350 Organizational BehaviorG JhaNoch keine Bewertungen
- 432 Bcs3&Bca31 Java ProgrammingDokument172 Seiten432 Bcs3&Bca31 Java ProgrammingsusmithaNoch keine Bewertungen
- Aqar 2018 PDFDokument29 SeitenAqar 2018 PDFRaviKumarNoch keine Bewertungen
- My SQLDokument44 SeitenMy SQLRachita RamanNoch keine Bewertungen
- Cat 22 0269Dokument18 SeitenCat 22 0269Dra. Elizabeth PaukerNoch keine Bewertungen
- 5.data WarehouseDokument19 Seiten5.data Warehouser.m.ram234Noch keine Bewertungen
- Purva K: Professional ProfileDokument7 SeitenPurva K: Professional ProfileDebidutta PattanaikNoch keine Bewertungen
- Developing A Stress Testing FrameworkDokument17 SeitenDeveloping A Stress Testing FrameworkAidan HolwerdaNoch keine Bewertungen
- Phrases For The TOEFL Speaking and Writing Sections (2008) - Part6Dokument20 SeitenPhrases For The TOEFL Speaking and Writing Sections (2008) - Part6MmNoch keine Bewertungen
- Process Managers Customers FreshdeskDokument4 SeitenProcess Managers Customers FreshdeskodetalalaNoch keine Bewertungen
- Kalogeropoulos Study Design TalkDokument35 SeitenKalogeropoulos Study Design TalkderieNoch keine Bewertungen
- Crystal Reports Training1Dokument257 SeitenCrystal Reports Training1LachureNoch keine Bewertungen
- 7bcee3a Unit V SQL BasicsDokument19 Seiten7bcee3a Unit V SQL BasicsRajendran Sheeba100% (1)
- Bms DFDDokument21 SeitenBms DFDسعداحمدNoch keine Bewertungen
- Merchant Banking and Financial Services AssignmentsDokument8 SeitenMerchant Banking and Financial Services AssignmentsAnkit JugranNoch keine Bewertungen
- Power Exchange Interfaces For Power CenterDokument227 SeitenPower Exchange Interfaces For Power CenterPreeti VNoch keine Bewertungen
- AMIETE CSmainDokument98 SeitenAMIETE CSmainsaihari08Noch keine Bewertungen
- Tcs Eis Brochure Automotive SolutionDokument4 SeitenTcs Eis Brochure Automotive SolutionYashwanth NarayananNoch keine Bewertungen
- Xebia Test ResultDokument16 SeitenXebia Test ResultBalbhim ThoratNoch keine Bewertungen
- GMAT Prep Course - The Phools Guide's Premier GMAT Prep CourseDokument32 SeitenGMAT Prep Course - The Phools Guide's Premier GMAT Prep CoursepeterJackson129Noch keine Bewertungen
- COS3711 2022 JanFeb Question PaperDokument6 SeitenCOS3711 2022 JanFeb Question PaperAndreNoch keine Bewertungen
- Oracle Dba SunilDokument4 SeitenOracle Dba SunilAswinNoch keine Bewertungen
- The Minimum You Need To Know To Be An OpenVMS Application DeveloperDokument60 SeitenThe Minimum You Need To Know To Be An OpenVMS Application DeveloperRoland Hughes0% (1)
- Module 8 - NonParametric TestsDokument12 SeitenModule 8 - NonParametric TestsLeah Marie Lozares UntalanNoch keine Bewertungen
- The Ultimate Guide To Cleaning Data in Excel and Google SheetsDokument80 SeitenThe Ultimate Guide To Cleaning Data in Excel and Google SheetsDeaneNoch keine Bewertungen
- Department Internship Bluebook 2021Dokument97 SeitenDepartment Internship Bluebook 2021Vamsi VirajNoch keine Bewertungen
- Assessment BriefDokument6 SeitenAssessment BriefAbeer PareekNoch keine Bewertungen
- Platform NotesDokument26 SeitenPlatform Notesaniket somNoch keine Bewertungen
- SQL DBA ResumeDokument6 SeitenSQL DBA Resumeindhu jayanNoch keine Bewertungen
- IBUS5003 Tut16 Group4 MichaelDokument15 SeitenIBUS5003 Tut16 Group4 Michaelbingbing YuNoch keine Bewertungen
- How-To Guide - Registering For Discounted Training Courses (2021)Dokument8 SeitenHow-To Guide - Registering For Discounted Training Courses (2021)Rafael Francisco Do PradoNoch keine Bewertungen
- User Guide: Informatica Powerexchange For Tableau (Version 10.0)Dokument32 SeitenUser Guide: Informatica Powerexchange For Tableau (Version 10.0)RosaNoch keine Bewertungen
- RTO (Recovery Time Objective) Vs RPO (Recovery Point Objective)Dokument5 SeitenRTO (Recovery Time Objective) Vs RPO (Recovery Point Objective)Joshua PrakashNoch keine Bewertungen
- Definition of Disaster Recovery ManagementDokument7 SeitenDefinition of Disaster Recovery ManagementHaariniNoch keine Bewertungen
- Disaster Recovery Exec Brief 069248Dokument2 SeitenDisaster Recovery Exec Brief 069248tingishaNoch keine Bewertungen
- Disaster Recovery Planning For Mysql MariadbDokument25 SeitenDisaster Recovery Planning For Mysql MariadbRanko Milovic-RankolioNoch keine Bewertungen
- Cloud Disaster RecoveryDokument27 SeitenCloud Disaster RecoveryUjwala BhogaNoch keine Bewertungen
- Green Tyre TechnologyDokument4 SeitenGreen Tyre TechnologyAnuj SharmaNoch keine Bewertungen
- Om - 3M CaseDokument18 SeitenOm - 3M CaseBianda Puspita Sari100% (1)
- Argumentative E-WPS OfficeDokument6 SeitenArgumentative E-WPS OfficeoneNoch keine Bewertungen
- Excel Tips TricksDokument26 SeitenExcel Tips Tricksskondra12Noch keine Bewertungen
- RMU With Eco-Efficient Gas Mixture-Evaluation After Three Years of Field ExperienceDokument5 SeitenRMU With Eco-Efficient Gas Mixture-Evaluation After Three Years of Field ExperienceZineddine BENOUADAHNoch keine Bewertungen
- White Paper - Data Communication in Substation Automation System SAS - Part 1 Original 23353Dokument5 SeitenWhite Paper - Data Communication in Substation Automation System SAS - Part 1 Original 23353sabrahimaNoch keine Bewertungen
- The Study of Challenges Faced by Paper IndustryDokument92 SeitenThe Study of Challenges Faced by Paper IndustryPrachi 21Noch keine Bewertungen
- Claims Reserving With R: Chainladder-0.2.10 Package VignetteDokument60 SeitenClaims Reserving With R: Chainladder-0.2.10 Package Vignetteenrique gonzalez duranNoch keine Bewertungen
- PDF Applied Failure Analysis 1 NSW - CompressDokument2 SeitenPDF Applied Failure Analysis 1 NSW - CompressAgungNoch keine Bewertungen
- Ashirvad SWR and SWR PLUS - Price List - 02nd April 2022Dokument14 SeitenAshirvad SWR and SWR PLUS - Price List - 02nd April 2022Magnum ConstructionsNoch keine Bewertungen
- Section 8 33KVDokument13 SeitenSection 8 33KVMuna HamidNoch keine Bewertungen
- Ge Washing Machine ManualDokument52 SeitenGe Washing Machine Manuallillith1723Noch keine Bewertungen
- Bp344 RampDokument29 SeitenBp344 RampmaeNoch keine Bewertungen
- Lust V Animal Logic MSJ OppositionDokument34 SeitenLust V Animal Logic MSJ OppositionTHROnlineNoch keine Bewertungen
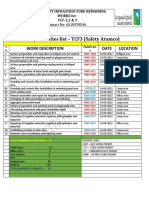
- Daily Activities List - TCF3 (Safety Aramco) : Work Description Date LocationDokument2 SeitenDaily Activities List - TCF3 (Safety Aramco) : Work Description Date LocationSheri DiĺlNoch keine Bewertungen
- Ranbaxy Acquisition by DaiichiDokument9 SeitenRanbaxy Acquisition by Daiichirupe59Noch keine Bewertungen
- Robert Plank's Super SixDokument35 SeitenRobert Plank's Super SixkoyworkzNoch keine Bewertungen
- sb485s rs232 A rs485Dokument24 Seitensb485s rs232 A rs485KAYCONSYSTECSLA KAYLA CONTROL SYSTEMNoch keine Bewertungen
- Depreciation Is A Term Used Reference To TheDokument14 SeitenDepreciation Is A Term Used Reference To TheMuzammil IqbalNoch keine Bewertungen
- Ems Accounting Term 2Dokument39 SeitenEms Accounting Term 2Paballo KoopediNoch keine Bewertungen
- Killicks Concrete VibratorsDokument2 SeitenKillicks Concrete Vibratorsmanish sharmaNoch keine Bewertungen
- St10 Flasher DLL: Stmicroelectronics ConfidentialDokument10 SeitenSt10 Flasher DLL: Stmicroelectronics Confidentialeshwarp sysargusNoch keine Bewertungen
- a27272636 s dndjdjdjd ansjdns sc7727272726 wuqyqqyyqwywyywwy2ywywyw6 4 u ssbsbx d d dbxnxjdjdjdnsjsjsjallospspsksnsnd s sscalop sksnsks scslcoapa ri8887773737372 d djdjwnzks sclalososplsakosskkszmdn d ebwjw2i2737721osjxnx n ksjdjdiwi27273uwzva sclakopsisos scaloopsnx_01_eDokument762 Seitena27272636 s dndjdjdjd ansjdns sc7727272726 wuqyqqyyqwywyywwy2ywywyw6 4 u ssbsbx d d dbxnxjdjdjdnsjsjsjallospspsksnsnd s sscalop sksnsks scslcoapa ri8887773737372 d djdjwnzks sclalososplsakosskkszmdn d ebwjw2i2737721osjxnx n ksjdjdiwi27273uwzva sclakopsisos scaloopsnx_01_eRed DiggerNoch keine Bewertungen
- Remedies FlowDokument44 SeitenRemedies Flowzeebeelo100% (1)
- Battlab Report 12 FinalDokument48 SeitenBattlab Report 12 FinalLianNoch keine Bewertungen
- San Miguel ReportDokument8 SeitenSan Miguel ReportTraveller SpiritNoch keine Bewertungen
- Ansi MV Techtopics75 enDokument2 SeitenAnsi MV Techtopics75 enjobpei2Noch keine Bewertungen
- Fashion Law - Trademark ParodyDokument12 SeitenFashion Law - Trademark ParodyArinta PratiwiNoch keine Bewertungen
- WabimalunoxowevefoDokument3 SeitenWabimalunoxowevefoChitmin KhantNoch keine Bewertungen
- Maxillofacial Trauma and Management - Dental Ebook & Lecture Notes PDF Download (Studynama - Com - India's Biggest Website For BDS Study Material Downloads)Dokument24 SeitenMaxillofacial Trauma and Management - Dental Ebook & Lecture Notes PDF Download (Studynama - Com - India's Biggest Website For BDS Study Material Downloads)Vinnie SinghNoch keine Bewertungen