Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (120)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- ThesisDokument54 SeitenThesis60565882Noch keine Bewertungen
- 175-4998 Signal Converter - CaterpillarDokument5 Seiten175-4998 Signal Converter - CaterpillarImad Hmd75% (4)
- Certain Investigations On The Characteristics of Pulse Plating Using Silver On Printed Circuit BoardDokument151 SeitenCertain Investigations On The Characteristics of Pulse Plating Using Silver On Printed Circuit BoarddanyNoch keine Bewertungen
- Technical Specification STS-3000K-H1 20kV 50Hz For 200 - 215KTL - V6.0 (France ONLY)Dokument19 SeitenTechnical Specification STS-3000K-H1 20kV 50Hz For 200 - 215KTL - V6.0 (France ONLY)Sav Sasha100% (1)
- Solar Powered Electric Vehicle ChargerDokument26 SeitenSolar Powered Electric Vehicle ChargerShekar ShringiNoch keine Bewertungen
- Public Notice: ISO 9001 CertifiedDokument1 SeitePublic Notice: ISO 9001 CertifiedSanjay SudhakarNoch keine Bewertungen
- Automatic Braking System Control: February 2003Dokument5 SeitenAutomatic Braking System Control: February 2003Shekar ShringiNoch keine Bewertungen
- JVVNL Syllabus - Mathematics (Class-XII Level)Dokument2 SeitenJVVNL Syllabus - Mathematics (Class-XII Level)Shekar ShringiNoch keine Bewertungen
- JVVNL Syllabus - Mathematics (Class-XII Level)Dokument2 SeitenJVVNL Syllabus - Mathematics (Class-XII Level)Shekar ShringiNoch keine Bewertungen
- Syllabus Drdo EceDokument2 SeitenSyllabus Drdo EceKoushal SoniNoch keine Bewertungen
- Rogowski Coil Design and SimulationDokument2 SeitenRogowski Coil Design and SimulationTonyPeace100% (2)
- Lithium Datasheet SaDokument7 SeitenLithium Datasheet SaArmin ZaimovićNoch keine Bewertungen
- Regulador Basler VR6Dokument4 SeitenRegulador Basler VR6Manuel OteroNoch keine Bewertungen
- An Overview of RF MEMS SwitchesDokument21 SeitenAn Overview of RF MEMS SwitchesSarjak Shah67% (3)
- Theoretical Basics 2 Experimental Setup 5 Carrying Out The Experiment 6 Analysis 8 Discussion 10 Data Sheet 11Dokument10 SeitenTheoretical Basics 2 Experimental Setup 5 Carrying Out The Experiment 6 Analysis 8 Discussion 10 Data Sheet 11Deepak ArunNoch keine Bewertungen
- Power Monitor Chip: Features Pin AssignmentDokument9 SeitenPower Monitor Chip: Features Pin Assignmentchafic WEISSNoch keine Bewertungen
- Frekventni RegulatoriDokument6 SeitenFrekventni RegulatoriGogyNoch keine Bewertungen
- Metal Detection Sensors: ID2000 - MD2000 - ID6000 FamiliesDokument2 SeitenMetal Detection Sensors: ID2000 - MD2000 - ID6000 FamiliessazzadNoch keine Bewertungen
- Infrared Receiver For Your PCv1Dokument8 SeitenInfrared Receiver For Your PCv1amritpal2489Noch keine Bewertungen
- KD600S-Newest-Manual-Book MANUAL EN ESPAÑOL (001-091)Dokument91 SeitenKD600S-Newest-Manual-Book MANUAL EN ESPAÑOL (001-091)armando valle durantesNoch keine Bewertungen
- Danger:: Installation Instructions Jdemo™Dokument19 SeitenDanger:: Installation Instructions Jdemo™betsuninNoch keine Bewertungen
- Oa172ec Ip68 Atex-1488245Dokument2 SeitenOa172ec Ip68 Atex-1488245Raul FelicianoNoch keine Bewertungen
- Week 5Dokument31 SeitenWeek 5HadeedAhmedSherNoch keine Bewertungen
- Microwave and RF Components (CST Studio)Dokument4 SeitenMicrowave and RF Components (CST Studio)Novri Yanto PanjaitanNoch keine Bewertungen
- ASI, VSI, AltimeterDokument6 SeitenASI, VSI, AltimeterAsari HammadNoch keine Bewertungen
- Nuclear Susol UL (TD - TS) MCCB - 1512Dokument84 SeitenNuclear Susol UL (TD - TS) MCCB - 1512juwinthir putra bengawanNoch keine Bewertungen
- Introduction To: Digital Signal ProcessingDokument11 SeitenIntroduction To: Digital Signal Processingdeba_bhaNoch keine Bewertungen
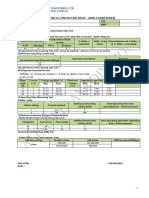
- Numerical Delta-I Protection Relay - Anpd 112 (An Series) : Customer TSS Serial No Date Test DetailsDokument1 SeiteNumerical Delta-I Protection Relay - Anpd 112 (An Series) : Customer TSS Serial No Date Test DetailsRCC PGTNoch keine Bewertungen
- MIT Radiaton Lab Series, V6, Microwave Magnetrons - Front Matter, Preface, ContentsDokument18 SeitenMIT Radiaton Lab Series, V6, Microwave Magnetrons - Front Matter, Preface, ContentsKevin HaworthNoch keine Bewertungen
- Druck UPS-II Loop CalibratorDokument2 SeitenDruck UPS-II Loop CalibratordocrafiNoch keine Bewertungen
- SimlabDokument32 SeitenSimlabAkbar AliNoch keine Bewertungen
- A9F74110 DocumentDokument2 SeitenA9F74110 DocumentLuceroGusmaninaNoch keine Bewertungen
- ECE 3113 Introduction Into RF Circuit Design: Lecture Notes For A-Term 2019Dokument9 SeitenECE 3113 Introduction Into RF Circuit Design: Lecture Notes For A-Term 2019kenNoch keine Bewertungen
- Pat Document BnjpoDokument64 SeitenPat Document BnjpoMohammadNoch keine Bewertungen
- Reflex Horn Speakers: TC-630/TC-630M TC-615/TC-615MDokument4 SeitenReflex Horn Speakers: TC-630/TC-630M TC-615/TC-615MEdison MendozaNoch keine Bewertungen